Lidar System Applied in Atmospheric Pollution Monitoring
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
An Application of the Theory of Laser to Nitrogen Laser Pumped Dye Laser
SD9900039 AN APPLICATION OF THE THEORY OF LASER TO NITROGEN LASER PUMPED DYE LASER FATIMA AHMED OSMAN A thesis submitted in partial fulfillment of the requirements for the degree of Master of Science in Physics. UNIVERSITY OF KHARTOUM FACULTY OF SCIENCE DEPARTMENT OF PHYSICS MARCH 1998 \ 3 0-44 In this thesis we gave a general discussion on lasers, reviewing some of are properties, types and applications. We also conducted an experiment where we obtained a dye laser pumped by nitrogen laser with a wave length of 337.1 nm and a power of 5 Mw. It was noticed that the produced radiation possesses ^ characteristic^ different from those of other types of laser. This' characteristics determine^ the tunability i.e. the possibility of choosing the appropriately required wave-length of radiation for various applications. DEDICATION TO MY BELOVED PARENTS AND MY SISTER NADI A ACKNOWLEDGEMENTS I would like to express my deep gratitude to my supervisor Dr. AH El Tahir Sharaf El-Din, for his continuous support and guidance. I am also grateful to Dr. Maui Hammed Shaded, for encouragement, and advice in using the computer. Thanks also go to Ustaz Akram Yousif Ibrahim for helping me while conducting the experimental part of the thesis, and to Ustaz Abaker Ali Abdalla, for advising me in several respects. I also thank my teachers in the Physics Department, of the Faculty of Science, University of Khartoum and my colleagues and co- workers at laser laboratory whose support and encouragement me created the right atmosphere of research for me. Finally I would like to thank my brother Salah Ahmed Osman, Mr. -

Nitrogen Laser Emissions of Short and Long Durations Generated in Air Mladen M
IEEE TRANSACTIONS ON PLASMA SCIENCE, VOL. 48, NO. 3, MARCH 2020 647 Nitrogen Laser Emissions of Short and Long Durations Generated in Air Mladen M. Kekez and David M. Villeneuve Abstract— This article describes two sets of experiments. pressure, the excitation of the N2 molecules, and consequently An eight-stage, pulse-forming network (PFN) Marx generator the laser emission would yield only short duration light pulses, of 50- internal impedance produces a “square”-shaped voltage from one nanosecond down to some tens of picoseconds. waveform and induces multiphoton ionization, excitation of molecules and ions to generate laser pulses of long (<3 μs) and From the research and development on CO2 lasers, it was short (∼10 ns) durations in air, when the principal laser line of learned that the delay in the transition from the glow-like the N laser at 337.1 nm was observed. The visible blue laser discharge to a fully developed spark channel is possible, when 2 + lines coming from the first negative band of N2 ions due to the the characteristic impedance of the driver is of relatively large 2 + → 2 + B u X g transition at 391.4 and 427.8 nm were studied. value (>10 ). The wideband (300–800 nm) Schott BG 39 interference filter was To explore the importance, the nine-stage Marx generator also employed to examine whether some other lines participate in the emission being generated. The scaling law was derived of 18- internal impedance was used in [5]. The electro- describing the attenuation of theemissionversusthedistance magnetic radiation pulses were observed both at the single for long-duration pulses (<3 μs) at 337.1 nm. -

Theoretical Model of TEA Nitrogen Laser Excited by Electric Discharge. Part 3
Optica Applicata, Vol. X X III, No. 4, 1993 Theoretical model of TEA nitrogen laser excited by electric discharge. Part 3. Construction and the preliminary results of the experimental setup examination J. Makuchowski, L. Pokora Laser Technics Centre, uL Kasprzaka 29/31, 01-234 Warszawa, Poland. A construction of two utilizable setups of nitrogen laser of the TEA-type produced on the basis of the experimental model described in Parts 1 and 2 [1], [2] of this work has been described. The realized models of nitrogen lasers were subjected to examinations. The preliminary results of these examinations were compared with the results of the respective theoretical calculations. High degree of consistence of the measurement results with those of the corresponding simulation calculations was achieved. 1. Introduction Due to attractive properties of radiation emitted by nitrogen lasers, in this field research in this field is being carried out almost continuously by different centres of science and technology. In a series of articles devoted to construction of nitrogen lasers pumped with transversal electric discharge [3] — [15], the energies and durations of pulses are reported together with some parameters of electric circuits (usually the energy accumulated in the capacitors and the supply voltage). There are very few descriptions of the scheme of electric circuit and details of the chamber structure of nitrogen laser are rarely provided. As was mentioned in the previous parts of this work [1], [2], the constructions described in the literature are difficult to reproduce so as to obtain either optimal or required parameters (or characteristics). In practice, two regions of nitrogen laser parameters are useful, ie., those for lasers generating nano- or subnanosecond pulses of radiation of high peak power, or those for lasers of relatively high energy generated in longer pulses. -
TE-N2 Laser by Using Low Inductance Capacitor
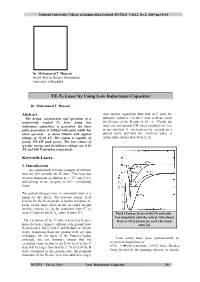
Nahrain University, College of Engineering Journal (NUCEJ) Vol.12, No.1, 2009 pp.58-61 Dr. Mohammed T. Hussein Assist .Prof in Physics Department University of Baghdad TE-N2 Laser by Using Low Inductance Capacitor Dr. Mohammed T. Hussein Abstract inter nuclear separation than that of C state the The design, construction and operation of a lifetime ( radiative ) of the C state is 40 ns, while transversely excited N2 laser using low the lifetime of the B state is 10 s . Clearly the inductance capacitors, is presented, the laser laser can not operate CW since condition ( 1< 21) pulse generation is 1200µJ with pulse width 8ns is not satisfied. It can however be excited on a when operated at about 30mbar with applied pulsed basis provided the electrical pulse is voltage of 15-30 kV. The system is capable of appreciably shorter than 40 ns [2,3]. giving 150 kW peak power. The best values of specific energy and breakdown voltage are 0.03 J/L and 600 V/cm-mbar respectively. Keywords:Lasers, 1. Introduction As a particularly relevant example of vibronic laser we will consider the N2 laser. This laser has its most important oscillation at =337 nm (UV), and belongs to the category of self terminating lasers. The pulsed nitrogen laser is commonly used as a pump for dye lasers. The relevant energy level scheme for the N2 molecule is shown in figure (1). Laser action takes place in the so-called second 3 positive system i.e., in the transition from C u state (C state) to the B 3 state (B state) [1]. -

Pulsed Inductive Discharge As New Method for Gas Lasers Pumping Razhev AM1,2, Churkin DS1,2 and Kargapol’Tsev ES1 1Institute of Laser Physics SB RAS, Lavrentyeva Ave
cal & Ele tri ct c ro le n i E c f S Razhev et al., J Electr Electron Syst 2013, 2:2 o l y Journal of s a t n e r m DOI: 10.4172/2332-0796.1000112 u s o J ISSN: 2332-0796 Electrical & Electronic Systems ResearchResearch Article Article OpenOpen Access Access Pulsed Inductive Discharge as New Method for Gas Lasers Pumping Razhev AM1,2, Churkin DS1,2 and Kargapol’tsev ES1 1Institute of Laser Physics SB RAS, Lavrentyeva ave. 13/3, Novosibirsk, 630090, Russia 2Novosibirsk State University, Pirogova st. 2, Novosibirsk, 630090, Russia Abstract Results of experimental investigations into the possibility of a pulsed inductive cylindrical discharge as a new method of pumping gas lasers operating at different transitions of atoms and molecules with different mechanisms of formation of inversion population are presented. The excitation systems of a pulsed inductive cylindrical discharge (pulsed inductively coupled plasma) in the gases are developed and experimentally investigated. For the first time five pulsed inductive lasers on the different transitions of atoms and molecules are created. Characteristic feature of the emission of pulsed inductive lasers is ring-shaped laser beam with low divergence and pulse-to-pulse instability is within 1%. Keywords: Pulsed inductive discharge; Gas lasers pumping; Pulsed different photodiodes and photomultipliers. The output laser energy inductively coupled plasma was measured with a PE50-BB Ophir pyroelectric pulse energy meter (Ophir Optronics Ltd). The temporal parameters of electric pulses were Introduction recorded with high-voltage P6015A probes and a 200-MHz TDS-2024 The RF induction excitation of continuous-wave lasing was reported Tektronix oscilloscope. -

Long-Pulse Excimer and Nitrogen Lasers Pumped by Generator with Inductive Energy Storage1
___________________________________________________________________________________________Pulsed power applications Long-Pulse Excimer and Nitrogen Lasers Pumped 1 by Generator with Inductive Energy Storage A. N. Panchenko, A. E. Telminov, and V. F. Tarasenko High current electronics institute, 2/3, Academichesky Av., Tomsk, 634055, Russia, Phone (3822)492-392, Fax (3822)492-410, E-mail: [email protected] Abstract – Laser and discharge parameters in lasers with efficiency up to 4-5% with long pulse mixtures of rare gases with halogens driven by a duration. On the other hand, it is difficult task to pre-pulse-sustainer circuit technique are studied. expand the output pulse duration of lasers on gas Inductive energy storage with semiconductor mixtures containing fluorine donor (XeF, KrF, and opening switch was used for the high-voltage pre- ArF and other lasers) due to fast discharge collapse5, 6. pulse formation. It was shown that the pre-pulse Alternative way of the pre-pulse formation is the with a high amplitude and short rise-time along use of inductive energy storage. In this pumping with sharp increase of discharge current and technique part of energy stored in a primary capacitor uniform UV- and x-ray preionization allow to form is transferred into circuit inductor of the pumping long-lived stable discharge in halogen containing generator and than using special device named gas mixtures. Improve of both pulse duration and opening switch to the load. Historically, laser output energy was achieved for XeCl-, XeF- and application of inductive energy storage (IES) was KrF excimer lasers. Maximal laser output was as studied using exploding wires7 or plasma erosion high as 1 J at intrinsic efficiency up to 4%. -

A Nitrogen-Laser-Pumped Dye Laser System ? ' A
Mr. 'Ian S. NAME OF AUTHOR/NOI# DE L'AUTEUR, GORDON h A Nitrogen-Laser-Pumped Dye . - T %tE OF THESIS/TfTRE DE LA TH& Phission is haQy (panted to ths NATIONAL LlEWW OF L'autwisetiim rst, par !a pr~*(nte:KCOI~@ 4 ,le ~UOTH~- -. 2 -, )-->- >CANADA m rnicrdilrn hi-4 mi s adto lend or ael l wisr WENATIONALE LJU-CANADA dr &rd&er cett* th&m at af the film. de pr4ter w ds VS~Rdes exonpl~jresdu film. The euB## reserves other publication raw,and neithgr the L'sutew se @serve fes eutrtw &&Is do puliHc&tion; ni la - thesis M* extbisiw extpzts from it mybe printed or olheii thdsenl de longs eqreits aGP cslt~ine doivent &re impritnds A NITROGEN- LASER-PUMPED - - * OF T~ REQUIREMENTS FOR THE DE6mE OF MASTER OF SCIENCE* in the Dapartnent A> -A .. is my not be reproduced in whole or in part, by photocopy or other means, without @rmission of the author. % . APPROVAL . \ . I '\ Name : Ian Sydney 'Gordon Degree : ast tar of Science t -~itl$of Themis : A Nf trogen Laser Pumped Dye Lmer - Examining Cowttee : Chairman: Be ?. Clayman .,- J. C. Irwin Senior Supervisor 0 8 I hereby grant to Uproa F -ty th~ r- , ' my thesis or d'ieeertation (the ti of "whgch =--below) to usen of the Simon Freser university Libr,ary, and to make partial or einglc @ copies only for such users or in response to a request from the library : of any other university, or other educational iitstitutim, on i'te 'own s behalf or for one of fts usere. -

Infrared Laser Desorption/Ionization Mass Spectrometry
Louisiana State University LSU Digital Commons LSU Doctoral Dissertations Graduate School 2006 Infrared laser desorption/ionization mass spectrometry: fundamental and applications Mark Little Louisiana State University and Agricultural and Mechanical College, [email protected] Follow this and additional works at: https://digitalcommons.lsu.edu/gradschool_dissertations Part of the Chemistry Commons Recommended Citation Little, Mark, "Infrared laser desorption/ionization mass spectrometry: fundamental and applications" (2006). LSU Doctoral Dissertations. 2690. https://digitalcommons.lsu.edu/gradschool_dissertations/2690 This Dissertation is brought to you for free and open access by the Graduate School at LSU Digital Commons. It has been accepted for inclusion in LSU Doctoral Dissertations by an authorized graduate school editor of LSU Digital Commons. For more information, please [email protected]. INFRARED LASER DESORPTION/IONIZATION MASS SPECTROMETRY: FUNDAMENTALS AND APPLICATIONS A Dissertation Submitted to the Graduate Faculty of the Louisiana State University and Agricultural and Mechanical College in partial fulfillment of the requirements for the degree of Doctor of Philosophy in The Department of Chemistry by Mark Little B.S., Wake Forest University, 1998 December 2006 ACKNOWLEDGMENTS The popular quote, "L'enfer, c'est les autres" from an existential play by Jean-Paul Sartre is translated “Hell is other people”. I chose this quote because if it were not for all the “other people” in my life, I would be sitting on a beach right now sipping margaritas but I would not have my Ph.D. Therefore, I raise my salt covered glass to all my friends, family and colleagues for without their support this program of study would never been completed. -

Gain Dynamics of a Free-Space Nitrogen Laser Pumped by Circularly Polarized Femtosecond Laser Pulses
Gain dynamics of a free-space nitrogen laser pumped by circularly polarized femtosecond laser pulses Jinping Yao1, Hongqiang Xie1,3, Bin Zeng1, Wei Chu1, Guihua Li1,3, Jielei Ni1, Haisu Zhang1,3, Chenrui Jing1,3, Chaojin Zhang1, Huailiang Xu2,4, Ya Cheng1,5, and Zhizhan Xu1,6 1 State Key Laboratory of High Field Laser Physics, Shanghai Institute of Optics and Fine Mechanics, Chinese Academy of Sciences, Shanghai 201800, China 2State Key Laboratory on Integrated Optoelectronics, College of Electronic Science and Engineering, Jilin University, Changchun 130012, China 3University of Chinese Academy of Sciences, Beijing 100049, China [email protected] [email protected] [email protected] Abstract: We experimentally demonstrate ultrafast dynamic of generation of a strong 337-nm nitrogen laser by injecting an external seed pulse into a femtosecond laser filament pumped by a circularly polarized laser pulse. In the pump-probe scheme, it is revealed that the population inversion between 3 3 the C Πu and B Πg states of N2 for the free-space 337-nm laser is firstly built up on the timescale of several picoseconds, followed by a relatively slow decay on the timescale of tens of picoseconds, depending on the nitrogen gas pressure. By measuring the intensities of 337-nm signal from nitrogen gas mixed with different concentrations of oxygen gas, it is also found that oxygen molecules have a significant quenching effect on the nitrogen laser signal. Our experimental observations agree with the picture of electron-impact excitation. References 1. T. Popmintchev, M. Chen, D. Popmintchev, P. Arpin, S. -

Theoretical Model of TEA Nitrogen Laser Excited by Electric Discharge Part 2
Optica Appticata, Vol XXIII, No. 2 - 3 , 1993 Theoretical model of TEA nitrogen laser excited by electric discharge Part 2. Results of calculations J. M akuchowski, L. Pokora Laser Technics Center, ul. Kasprzaka 29/31, 01-234 Warszawa, Poland. The results of calculations of characteristics of atmospheric nitrogen laser of TEA type were obtained by applying the formerly elaborated theoretical model described in Part 1 of this work [1]. The results reported show the influence of particular design and external parameters of the laser on its characteristics. The presented results of calculations are qualitatively and quantitatively consistent with the results published in the papers mentioned in this paper [3] —[6], [8], [9]. 1. Description of the numerical programme Theoretical model of nitrogen laser described in the first part of this paper has been presented schematically in a block diagram in Fig. 1. The numerical programme realizing this theoretical model has been written in Fortran language. The block scheme of this computer programme is shown in Fig. 2. Input data Connections Set of differential between equations particular Charging voltage 6as pressure characteristics Fig. 1. Block scheme presenting the constructed theoretical model of nitrogen laser. 1 — electron density, 2 — electron mobility, 3 — electric field strength, 4 — coefficients of reaction kinetics, 5 — population of levels, 6 — photon density, 7 — population of laser levels 132 J. M akuchowskj, L. P okora Fig. 2. Block scheme of numerical operation of programme for calculation of nitrogen laser Fig. 3. Block scheme presenting the construction of the numerical programme to calculate the nitrogen laser The programme consists of several subroutines which have been presented schematically in Fig. -

System Description of the Mobile LIDAR of the CSIR, South Africa
456 South African Journal of Science 105, November/December 2009 Research Articles System description of the mobile LIDAR of the CSIR, South Africa A. Sharmaa, V. Sivakumara,b*, C. Bolliga, C. van der Westhuizena and D. Moemaa spheric SO2 measurements. Since these pioneering attempts, laser remote sensing of the atmosphere has come a long way. South Africa’s first mobile LIDAR (LIght Detection And Ranging) With the development of different laser sources, improvements system is being developed at the National Laser Centre (NLC) of the in detector technology and improved data collection and analysis Council for Scientific and Industrial Research (CSIR) in Pretoria techniques, LIDAR has become a reliable and effective tool for (25°45’S; 28°17’E). The system is designed primarily for remote atmosphere research.1 sensing of the atmosphere. At present, the system is being optimised In a recent internet survey,20 it was confirmed that, although for measuring vertical atmospheric backscatter profiles of aerosols LIDAR studies of the atmosphere are highly prevalent in other and clouds. In this paper, we describe the complete LIDAR system, parts of the world, LIDAR is yet to become a state of the art system including laser transmission, telescope configuration, data acquisi- for Africa, including South Africa. Using advanced techniques tion, data archival and post-processing. and instrumentation, a mobile LIDAR system was designed and Key words: LIDAR, atmosphere, backscatter, laser, remote sensing is being developed at the Council for Scientific and Industrial Research (CSIR) National Laser Centre (NLC) in Pretoria (25°45’S; 28°17’E). This paper focuses on the technical specifica- Introduction tions of the mobile LIDAR system. -

Your Diy Nitrogen Laser Is NOT a Blumlein!
Your DiY Nitrogen Laser is NOT a Blumlein! http://www.jonsinger.org/jossresearch/lasers/nitrogen/Joseph-DiVerdi-circuitboardlas... An Examination of the Amateur Scientist Circuitboard Nitrogen Laser Contents: Abstract Preliminaries Blumlein and His Circuit The Issue of Latency Travelling-Wave Excitation Issues Related to Scale Power and Energy Closing Remarks Some Interesting Papers Abstract Many Do-It-Yourselfers have built nitrogen lasers, often from a design published in the Amateur Scientist column of Scientific American magazine. This page discusses the text of that column in some detail, and shows several ways in which the explanation of the design and how it operates is faulty. To Begin In the Amateur Scientist column, on page 122 of the June, 1974 issue of Scientific American, there was a design for a tabletop nitrogen laser. It was written by someone named Jim Small, who was a student at MIT at the time. The article was later republished in the Scientific American book Light and Its Uses, and is also on the CD of Amateur Scientist columns, which you can get from The Society for Amateur Scientists. I have also found this CD available from The Surplus Shed, and from American Science and Surplus. The design isn’t bad at all: it’s easy to build, easy to operate, and puts out enough energy to drive a small dye laser. In fact, people are still building lasers from it today. Unfortunately, there are serious problems with the author’s explanation of how it works. I’m not about to violate copyright by reproducing the drawings from the article, and I don’t have time to redraw them, so it will help you to have a copy in front of you.