Design of Fully Differential Operational Amplifier with High Gain, Large Bandwidth and Large Dynamic Range
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Op Amp Stability and Input Capacitance
Amplifiers: Op Amps Texas Instruments Incorporated Op amp stability and input capacitance By Ron Mancini (Email: [email protected]) Staff Scientist, Advanced Analog Products Introduction Figure 1. Equation 1 can be written from the op Op amp instability is compensated out with the addition of amp schematic by opening the feedback loop an external RC network to the circuit. There are thousands and calculating gain of different op amps, but all of them fall into two categories: uncompensated and internally compensated. Uncompen- sated op amps always require external compensation ZG ZF components to achieve stability; while internally compen- VIN1 sated op amps are stable, under limited conditions, with no additional external components. – ZG VOUT Internally compensated op amps can be made unstable VIN2 + in several ways: by driving capacitive loads, by adding capacitance to the inverting input lead, and by adding in ZF phase feedback with external components. Adding in phase feedback is a popular method of making an oscillator that is beyond the scope of this article. Input capacitance is hard to avoid because the op amp leads have stray capaci- tance and the printed circuit board contributes some stray Figure 2. Open-loop-gain/phase curves are capacitance, so many internally compensated op amp critical stability-analysis tools circuits require external compensation to restore stability. Output capacitance comes in the form of some kind of load—a cable, converter-input capacitance, or filter 80 240 VDD = 1.8 V & 2.7 V (dB) 70 210 capacitance—and reduces stability in buffer configurations. RL= 2 kΩ VD 60 180 CL = 10 pF 150 Stability theory review 50 TA = 25˚C 40 120 Phase The theory for the op amp circuit shown in Figure 1 is 90 β 30 taken from Reference 1, Chapter 6. -

1.5A, 24V, 17Mhz Power Operational Amplifier Datasheet (Rev. E)
OPA564 www.ti.com SBOS372E –OCTOBER 2008–REVISED JANUARY 2011 1.5A, 24V, 17MHz POWER OPERATIONAL AMPLIFIER Check for Samples: OPA564 1FEATURES 23• HIGH OUTPUT CURRENT: 1.5A DESCRIPTION • WIDE POWER-SUPPLY RANGE: The OPA564 is a low-cost, high-current operational – Single Supply: +7V to +24V amplifier that is ideal for driving up to 1.5A into reactive loads. The high slew rate provides 1.3MHz – Dual Supply: ±3.5V to ±12V full-power bandwidth and excellent linearity. These • LARGE OUTPUT SWING: 20VPP at 1.5A monolithic integrated circuits provide high reliability in • FULLY PROTECTED: demanding powerline communications and motor control applications. – THERMAL SHUTDOWN – ADJUSTABLE CURRENT LIMIT The OPA564 operates from a single supply of 7V to 24V, or dual power supplies of ±3.5V to ±12V. In • DIAGNOSTIC FLAGS: single-supply operation, the input common-mode – OVER-CURRENT range extends to the negative supply. At maximum – THERMAL SHUTDOWN output current, a wide output swing provides a 20VPP (I = 1.5A) capability with a nominal 24V supply. • OUTPUT ENABLE/SHUTDOWN CONTROL OUT • HIGH SPEED: The OPA564 is internally protected against over-temperature conditions and current overloads. It – GAIN-BANDWIDTH PRODUCT: 17MHz is designed to provide an accurate, user-selected – FULL-POWER BANDWIDTH AT 10VPP: current limit. Two flag outputs are provided; one 1.3MHz indicates current limit and the second shows a – SLEW RATE: 40V/ms thermal over-temperature condition. It also has an Enable/Shutdown pin that can be forced low to shut • DIODE FOR JUNCTION TEMPERATURE down the output, effectively disconnecting the load. MONITORING The OPA564 is housed in a thermally-enhanced, • HSOP-20 PowerPAD™ PACKAGE surface-mount PowerPAD™ package (HSOP-20) with (Bottom- and Top-Side Thermal Pad Versions) the choice of the thermal pad on either the top side or the bottom side of the package. -

EE C128 Chapter 10
Lecture abstract EE C128 / ME C134 – Feedback Control Systems Topics covered in this presentation Lecture – Chapter 10 – Frequency Response Techniques I Advantages of FR techniques over RL I Define FR Alexandre Bayen I Define Bode & Nyquist plots I Relation between poles & zeros to Bode plots (slope, etc.) Department of Electrical Engineering & Computer Science st nd University of California Berkeley I Features of 1 -&2 -order system Bode plots I Define Nyquist criterion I Method of dealing with OL poles & zeros on imaginary axis I Simple method of dealing with OL stable & unstable systems I Determining gain & phase margins from Bode & Nyquist plots I Define static error constants September 10, 2013 I Determining static error constants from Bode & Nyquist plots I Determining TF from experimental FR data Bayen (EECS, UCB) Feedback Control Systems September 10, 2013 1 / 64 Bayen (EECS, UCB) Feedback Control Systems September 10, 2013 2 / 64 10 FR techniques 10.1 Intro Chapter outline 1 10 Frequency response techniques 1 10 Frequency response techniques 10.1 Introduction 10.1 Introduction 10.2 Asymptotic approximations: Bode plots 10.2 Asymptotic approximations: Bode plots 10.3 Introduction to Nyquist criterion 10.3 Introduction to Nyquist criterion 10.4 Sketching the Nyquist diagram 10.4 Sketching the Nyquist diagram 10.5 Stability via the Nyquist diagram 10.5 Stability via the Nyquist diagram 10.6 Gain margin and phase margin via the Nyquist diagram 10.6 Gain margin and phase margin via the Nyquist diagram 10.7 Stability, gain margin, and -

Designing Linear Amplifiers Using the IL300 Optocoupler Application Note
Application Note 50 Vishay Semiconductors Designing Linear Amplifiers Using the IL300 Optocoupler INTRODUCTION linearizes the LED’s output flux and eliminates the LED’s This application note presents isolation amplifier circuit time and temperature. The galvanic isolation between the designs useful in industrial, instrumentation, medical, and input and the output is provided by a second PIN photodiode communication systems. It covers the IL300’s coupling (pins 5, 6) located on the output side of the coupler. The specifications, and circuit topologies for photovoltaic and output current, IP2, from this photodiode accurately tracks the photoconductive amplifier design. Specific designs include photocurrent generated by the servo photodiode. unipolar and bipolar responding amplifiers. Both single Figure 1 shows the package footprint and electrical ended and differential amplifier configurations are discussed. schematic of the IL300. The following sections discuss the Also included is a brief tutorial on the operation of key operating characteristics of the IL300. The IL300 photodetectors and their characteristics. performance characteristics are specified with the Galvanic isolation is desirable and often essential in many photodiodes operating in the photoconductive mode. measurement systems. Applications requiring galvanic isolation include industrial sensors, medical transducers, and IL300 mains powered switchmode power supplies. Operator safety 1 8 and signal quality are insured with isolated interconnections. These isolated interconnections commonly use isolation 2 K2 7 amplifiers. K1 Industrial sensors include thermocouples, strain gauges, and pressure transducers. They provide monitoring signals to a 3 6 process control system. Their low level DC and AC signal must be accurately measured in the presence of high 4 5 common-mode noise. -

NTE7144 Integrated Circuit BIMOS Operational Amplifier W/MOSFET Input, Bipolar Output
NTE7144 Integrated Circuit BIMOS Operational Amplifier w/MOSFET Input, Bipolar Output Description: The NTE7144 is an integrated circuit operational amplifier in an 8–Lead Mini–DIP type package that combines the advantages of high–voltage PMOS transistors with high–voltage bipolar transistors on a single monolithic chip. This device features gate–protected MOSFET (PMOS) transistors in the in- put circuit to provide very–high–input impedance, very–low–input current, and high–speed perfor- mance. The NTE7144 operates at supply voltages from 4V to 36V (either single or dual supply) and is internally phase–compensated to achieve stable operation in unity–gain follower operation. The use of PMOS field–effect transistors in the input stage results in common–mode input–voltage capability down to 0.5V below the negative–supply terminal, an important attribute for single–supply applications. The output stage uses bipolar transistors and includes built–in protection against dam- age from load–terminal short–circuiting to either supply–rail or to GND. Features: D MOSFET Input Stage: Very High Input Impedance Very Low Input Current Wide Common–Mode Input Voltage Range Output Swing Complements Input Common–Mode Range D Directly Replaces Industry Type 741 in Most Applications Applications: D Ground–Referenced Single–Supply Amplifiers in Automobile and Portable Instrumentation D Sample and Hold Amplifiers D Long–Duration Timers/Multivibrators (Microseconds – Minutes – Hours) D Photocurrent Instrumentation D Peak Detectors D Active Filters D Comparators D Interface in 5V TTL Systems and other Low–Supply Voltage Systems D All Standard Operational Amplifier Applications D Function Generators D Tone Controls D Power Supplies D Portable Instruments D Intrusion Alarm Systems Absolute Maximum Ratings: DC Supply Voltage (Between V+ and V– Terminals). -

Example of a MOSFET Operational Amplifier
Example of a MOSFET Operational Amplifier: This circuit is one I “designed” as an example for Engineering 1620. It is certainly not fully optimized and I am not sure it is free of errors. It is based on a 1.5 micron, P-well process and therefore uses an N-channel differential pair for its input. This is somewhat unusual because P-channel devices have lower intrinsic noise and are the device-type of choice for the input stage. I did this simply to avoid doing your SPICE assignment for you. The overall properties of the circuit are given in the table below. Amplifier Property Value A0 – DC Gain 86 DB (X20,000) fp – dominant pole position 400 Hz fGBW 8.0 MHz fU – unity gain frequency 5.6 MHz Output stage resistance at low frequency 277 K Zero position 10.7 MHz Slew Rate 710 6 V/sec Output stage quiescent current 65 a Opamp quiescent current 103 a Bias circuit quiescent current 104 a Total system quiescent current 210 a VDD 5.0 volts Total system power 1.1 mW MOSFET Operational Amplifier Gain and Phase 10 0 18 0 80 12 0 60 Gain 60 Phase 40 0 Gain (DB) 20 -60 Phase (deg.) 0 -120 -20 -180 1.00E+02 1.00E+03 1.00E+04 1.00E+05 1.00E+06 1.00E+07 1.00E+08 Frequency (Hz) Phase margin = 60 deg. Parameter Table for MOSFET Opamp Example element model vds vgs vth vov id gm ro m1 nssb 0.748 0.851 0.547 0.304 3.77E-05 2.90E-04 5.54E+05 m10 nssb 3.368 0.851 0.547 0.304 4.12E-05 3.11E-04 8.09E+05 m12 nssb 0.711 0.711 0.546 0.165 3.51E-05 5.01E-04 5.05E+05 m13 nssb 0.838 0.851 0.547 0.304 3.79E-05 2.91E-04 5.92E+05 m14 nssb 3.078 1.079 0.840 0.239 3.51E-05 -

OA-25 Stability Analysis of Current Feedback Amplifiers
OBSOLETE Application Report SNOA371C–May 1995–Revised April 2013 OA-25 Stability Analysis of Current Feedback Amplifiers ..................................................................................................................................................... ABSTRACT High frequency current-feedback amplifiers (CFA) are finding a wide acceptance in more complicated applications from dc to high bandwidths. Often the applications involve amplifying signals in simple resistive networks for which the device-specific data sheets provide adequate information to complete the task. Too often the CFA application involves amplifying signals that have a complex load or parasitic components at the external nodes that creates stability problems. Contents 1 Introduction .................................................................................................................. 2 2 Stability Review ............................................................................................................. 2 3 Review of Bode Analysis ................................................................................................... 2 4 A Better Model .............................................................................................................. 3 5 Mathematical Justification .................................................................................................. 3 6 Open Loop Transimpedance Plot ......................................................................................... 4 7 Including Z(s) ............................................................................................................... -

AN55 Power Supply Bypassing for High-Voltage Operational Amplifiers
AN55 Power Supply Bypassing for High-Voltage Operatinal Amplifiers POWER SUPPLY BYPASSING FOR HIGH-VOLTAGE OPERATIONAL AMPLIFIERS With the introduction of Apex’s high-voltage amplifiers like PA89 and PA99, new issues arise in the realm of circuit board layout and power supply bypassing. Working with these amplifiers, designers quickly realize that the same rules do not apply between bypassing high- and low-voltage Op-Amps. This applications infor- mation is meant to assist in designing the bypass system in a high-voltage operational amplifier circuit and choosing the perfect capacitors for use in such designs. THE NEED FOR POWER SUPPLY BYPASSING Before finding a couple of high-voltage capacitors and tacking them onto your supply rails, it is vital to realize the purpose of these capacitors and what we need them to do. Power supply bypass capacitors are there to stabilize the supply voltages of a circuit. Logically, the next question to answer would be, “What causes supply voltages to change?” This list can go on, but the most common reasons for changing supply voltages are power interruptions, high-frequency voltage/current spikes, and high-current draws. Figure 1: Power Supply Rejection Chart of PA89 100 80 60 40 20 WŽǁĞƌ^ƵƉƉůLJZĞũĞĐƟŽŶ͕W^Z;ĚͿ 0 1 10100 1k 10k 100k1M 10M Frequency, F (Hz) The first two entries on the list can be lumped into one category called “high-frequency events.” One close look at the datasheet for PA89 yields the Power Supply Rejection chart. As the frequency increases, power supply rejection falls off rather quickly. For example, if the power supply rail experiences a 100 kHz spike, then as much as 1% of that high-frequency voltage change will show up on the output. -

A Differential Operational Amplifier Circuit Collection
Application Report SLOA064A – April 2003 A Differential Op-Amp Circuit Collection Bruce Carter High Performance Linear Products ABSTRACT All op-amps are differential input devices. Designers are accustomed to working with these inputs and connecting each to the proper potential. What happens when there are two outputs? How does a designer connect the second output? How are gain stages and filters developed? This application note answers these questions and gives a jumpstart to apprehensive designers. 1 INTRODUCTION The idea of fully-differential op-amps is not new. The first commercial op-amp, the K2-W, utilized two dual section tubes (4 active circuit elements) to implement an op-amp with differential inputs and outputs. It required a ±300 Vdc power supply, dissipating 4.5 W of power, had a corner frequency of 1 Hz, and a gain bandwidth product of 1 MHz(1). In an era of discrete tube or transistor op-amp modules, any potential advantage to be gained from fully-differential circuitry was masked by primitive op-amp module performance. Fully- differential output op-amps were abandoned in favor of single ended op-amps. Fully-differential op-amps were all but forgotten, even when IC technology was developed. The main reason appears to be the simplicity of using single ended op-amps. The number of passive components required to support a fully-differential circuit is approximately double that of a single-ended circuit. The thinking may have been “Why double the number of passive components when there is nothing to be gained?” Almost 50 years later, IC processing has matured to the point that fully-differential op-amps are possible that offer significant advantage over their single-ended cousins. -

9 Op-Amps and Transistors
Notes for course EE1.1 Circuit Analysis 2004-05 TOPIC 9 – OPERATIONAL AMPLIFIER AND TRANSISTOR CIRCUITS . Op-amp basic concepts and sub-circuits . Practical aspects of op-amps; feedback and stability . Nodal analysis of op-amp circuits . Transistor models . Frequency response of op-amp and transistor circuits 1 THE OPERATIONAL AMPLIFIER: BASIC CONCEPTS AND SUB-CIRCUITS 1.1 General The operational amplifier is a universal active element It is cheap and small and easier to use than transistors It usually takes the form of an integrated circuit containing about 50 – 100 transistors; the circuit is designed to approximate an ideal controlled source; for many situations, its characteristics can be considered as ideal It is common practice to shorten the term "operational amplifier" to op-amp The term operational arose because, before the era of digital computers, such amplifiers were used in analog computers to perform the operations of scalar multiplication, sign inversion, summation, integration and differentiation for the solution of differential equations Nowadays, they are considered to be general active elements for analogue circuit design and have many different applications 1.2 Op-amp Definition We may define the op-amp to be a grounded VCVS with a voltage gain (µ) that is infinite The circuit symbol for the op-amp is as follows: An equivalent circuit, in the form of a VCVS is as follows: The three terminal voltages v+, v–, and vo are all node voltages relative to ground When we analyze a circuit containing op-amps, we cannot use the -
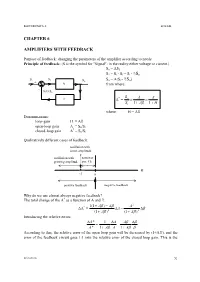
Chapter 6 Amplifiers with Feedback
ELECTRONICS-1. ZOLTAI CHAPTER 6 AMPLIFIERS WITH FEEDBACK Purpose of feedback: changing the parameters of the amplifier according to needs. Principle of feedback: (S is the symbol for Signal: in the reality either voltage or current.) So = AS1 S1 = Si - Sf = Si - ßSo Si S1 So = A(Si - S ) So ß o + A from where: - Sf=ßSo * So A A ß A = Si 1 A 1 H where: H = Aß Denominations: loop-gain H = Aß open-loop gain A = So/S1 * closed-loop gain A = So/Si Qualitatively different cases of feedback: oscillation with const. amplitude oscillation with narrower growing amplitude pos. f.b. H -1 0 positive feedback negative feedback Why do we use almost always negative feedback? * The total change of the A as a function of A and ß: 1(1 A) A A 2 A* = A (1 A) 2 (1 A) 2 Introducing the relative errors: A * 1 A A A * 1 A A 1 A According to this, the relative error of the open loop gain will be decreased by (1+Aß), and the error of the feedback circuit goes 1:1 into the relative error of the closed loop gain. This is the Elec1-fb.doc 52 ELECTRONICS-1. ZOLTAI reason for using almost always the negative feedback. (We can not take advantage of the negative sign, because the sign of the relative errors is random.) Speaking of negative or positive feedback is only justified if A and ß are real quantities. Generally they are complex quantities, and the type of the feedback is a function of the frequency: E.g. -

MT-033: Voltage Feedback Op Amp Gain and Bandwidth
MT-033 TUTORIAL Voltage Feedback Op Amp Gain and Bandwidth INTRODUCTION This tutorial examines the common ways to specify op amp gain and bandwidth. It should be noted that this discussion applies to voltage feedback (VFB) op amps—current feedback (CFB) op amps are discussed in a later tutorial (MT-034). OPEN-LOOP GAIN Unlike the ideal op amp, a practical op amp has a finite gain. The open-loop dc gain (usually referred to as AVOL) is the gain of the amplifier without the feedback loop being closed, hence the name “open-loop.” For a precision op amp this gain can be vary high, on the order of 160 dB (100 million) or more. This gain is flat from dc to what is referred to as the dominant pole corner frequency. From there the gain falls off at 6 dB/octave (20 dB/decade). An octave is a doubling in frequency and a decade is ×10 in frequency). If the op amp has a single pole, the open-loop gain will continue to fall at this rate as shown in Figure 1A. A practical op amp will have more than one pole as shown in Figure 1B. The second pole will double the rate at which the open- loop gain falls to 12 dB/octave (40 dB/decade). If the open-loop gain has dropped below 0 dB (unity gain) before it reaches the frequency of the second pole, the op amp will be unconditionally stable at any gain. This will be typically referred to as unity gain stable on the data sheet.