5.1 Radians and Angle Measure
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Rotational Motion (The Dynamics of a Rigid Body)
University of Nebraska - Lincoln DigitalCommons@University of Nebraska - Lincoln Robert Katz Publications Research Papers in Physics and Astronomy 1-1958 Physics, Chapter 11: Rotational Motion (The Dynamics of a Rigid Body) Henry Semat City College of New York Robert Katz University of Nebraska-Lincoln, [email protected] Follow this and additional works at: https://digitalcommons.unl.edu/physicskatz Part of the Physics Commons Semat, Henry and Katz, Robert, "Physics, Chapter 11: Rotational Motion (The Dynamics of a Rigid Body)" (1958). Robert Katz Publications. 141. https://digitalcommons.unl.edu/physicskatz/141 This Article is brought to you for free and open access by the Research Papers in Physics and Astronomy at DigitalCommons@University of Nebraska - Lincoln. It has been accepted for inclusion in Robert Katz Publications by an authorized administrator of DigitalCommons@University of Nebraska - Lincoln. 11 Rotational Motion (The Dynamics of a Rigid Body) 11-1 Motion about a Fixed Axis The motion of the flywheel of an engine and of a pulley on its axle are examples of an important type of motion of a rigid body, that of the motion of rotation about a fixed axis. Consider the motion of a uniform disk rotat ing about a fixed axis passing through its center of gravity C perpendicular to the face of the disk, as shown in Figure 11-1. The motion of this disk may be de scribed in terms of the motions of each of its individual particles, but a better way to describe the motion is in terms of the angle through which the disk rotates. -

The Rotation Group in Plate Tectonics and the Representation of Uncertainties of Plate Reconstructions
Geophys. J. In?. (1990) 101, 649-661 The rotation group in plate tectonics and the representation of uncertainties of plate reconstructions T. Chang’ J. Stock2 and P. Molnar3 ‘Department of Mathematics, University of Virginia, Charlottesville, Virginia 22903-3199, USA ‘Department of Earth and Planetary Sciences, Harvard University, Cambridge, MA 02138, USA ’Department of Earth, Atmospheric, and Planetary Sciences, Massachusetts Institute of Technology, Cambridge, MA 02139, USA Accepted 1989 December 27. Received 1989 December 27; in original form 1989 August 11 Downloaded from SUMMARY The calculation of the uncertainty in an estimated rotation requires a parametriza- tion of the rotation group; that is, a unique mapping of the rotation group to a point in 3-D Euclidean space, R3. Numerous parametrizations of a rotation exist, http://gji.oxfordjournals.org/ including: (1) the latitude and longitude of the axis of rotation and the angle of rotation; (2) a representation as a Cartesian vector with length equal to the rotation angle and direction parallel to the rotation axis; (3) Euler angles; or (4) unit length quaternions (or, equivalently, Cayley-Klein parameters). The uncertainty in a rotation is determined by the effect of nearby rotations on the rotated data. The uncertainty in a rotation is small, if rotations close to the best fitting rotation degrade the fit of the data by a large amount, and it is large, if only rotations differing by a large amount cause such a degradation. Ideally, we would at California Institute of Technology on August 29, 2014 like to parametrize the rotations in such a way so that their representation as points in R3 would have the property that the distance between two points in R3 reflects the effects of the corresponding rotations on the fit of the data. -

Guide for the Use of the International System of Units (SI)
Guide for the Use of the International System of Units (SI) m kg s cd SI mol K A NIST Special Publication 811 2008 Edition Ambler Thompson and Barry N. Taylor NIST Special Publication 811 2008 Edition Guide for the Use of the International System of Units (SI) Ambler Thompson Technology Services and Barry N. Taylor Physics Laboratory National Institute of Standards and Technology Gaithersburg, MD 20899 (Supersedes NIST Special Publication 811, 1995 Edition, April 1995) March 2008 U.S. Department of Commerce Carlos M. Gutierrez, Secretary National Institute of Standards and Technology James M. Turner, Acting Director National Institute of Standards and Technology Special Publication 811, 2008 Edition (Supersedes NIST Special Publication 811, April 1995 Edition) Natl. Inst. Stand. Technol. Spec. Publ. 811, 2008 Ed., 85 pages (March 2008; 2nd printing November 2008) CODEN: NSPUE3 Note on 2nd printing: This 2nd printing dated November 2008 of NIST SP811 corrects a number of minor typographical errors present in the 1st printing dated March 2008. Guide for the Use of the International System of Units (SI) Preface The International System of Units, universally abbreviated SI (from the French Le Système International d’Unités), is the modern metric system of measurement. Long the dominant measurement system used in science, the SI is becoming the dominant measurement system used in international commerce. The Omnibus Trade and Competitiveness Act of August 1988 [Public Law (PL) 100-418] changed the name of the National Bureau of Standards (NBS) to the National Institute of Standards and Technology (NIST) and gave to NIST the added task of helping U.S. -

4-2 Degrees and Radians
4-2 Degrees and Radians Write each degree measure in radians as a multiple of π and each radian measure in degrees. 10. 30° SOLUTION: To convert a degree measure to radians, multiply by ANSWER: 14. SOLUTION: To convert a radian measure to degrees, multiply by ANSWER: 120° Identify all angles that are coterminal with the given angle. Then find and draw one positive and one negative angle coterminal with the given angle. 20. 225° SOLUTION: All angles measuring are coterminal with a angle. Sample answer: Let n = 1 and −1. eSolutions Manual - Powered by Cognero Page 1 ANSWER: 225° + 360n°; Sample answer: 585°, −135° 24. SOLUTION: All angles measuring are coterminal with a angle. Sample answer: Let n = 1 and −1. ANSWER: Find the length of the intercepted arc with the given central angle measure in a circle with the given radius. Round to the nearest tenth. 29. , r = 4 yd SOLUTION: ANSWER: 5.2 yd 30. 105°, r = 18.2 cm SOLUTION: Method 1 Convert 105° to radian measure, and then use s = rθ to find the arc length. Substitute r = 18.2 and θ = . Method 2 Use s = to find the arc length. ANSWER: 33.4 cm Find the rotation in revolutions per minute given the angular speed and the radius given the linear speed and the rate of rotation. 36. = 104π rad/min SOLUTION: The angular speed is 104π radians per minute. Each revolution measures 2π radians 104π ÷ 2π = 52 The angle of rotation is 52 revolutions per minute. ANSWER: 52 rev/min 37. v = 82.3 m/s, 131 rev/min SOLUTION: 131 × 2π = 262π The linear speed is 82.3 meters per second with an angle of rotation of 262π radians per minute. -

Rotation Matrix - Wikipedia, the Free Encyclopedia Page 1 of 22
Rotation matrix - Wikipedia, the free encyclopedia Page 1 of 22 Rotation matrix From Wikipedia, the free encyclopedia In linear algebra, a rotation matrix is a matrix that is used to perform a rotation in Euclidean space. For example the matrix rotates points in the xy -Cartesian plane counterclockwise through an angle θ about the origin of the Cartesian coordinate system. To perform the rotation, the position of each point must be represented by a column vector v, containing the coordinates of the point. A rotated vector is obtained by using the matrix multiplication Rv (see below for details). In two and three dimensions, rotation matrices are among the simplest algebraic descriptions of rotations, and are used extensively for computations in geometry, physics, and computer graphics. Though most applications involve rotations in two or three dimensions, rotation matrices can be defined for n-dimensional space. Rotation matrices are always square, with real entries. Algebraically, a rotation matrix in n-dimensions is a n × n special orthogonal matrix, i.e. an orthogonal matrix whose determinant is 1: . The set of all rotation matrices forms a group, known as the rotation group or the special orthogonal group. It is a subset of the orthogonal group, which includes reflections and consists of all orthogonal matrices with determinant 1 or -1, and of the special linear group, which includes all volume-preserving transformations and consists of matrices with determinant 1. Contents 1 Rotations in two dimensions 1.1 Non-standard orientation -
4.1 – Radian and Degree Measure
4.1 { Radian and Degree Measure Accelerated Pre-Calculus Mr. Niedert Accelerated Pre-Calculus 4.1 { Radian and Degree Measure Mr. Niedert 1 / 27 2 Radian Measure 3 Degree Measure 4 Applications 4.1 { Radian and Degree Measure 1 Angles Accelerated Pre-Calculus 4.1 { Radian and Degree Measure Mr. Niedert 2 / 27 3 Degree Measure 4 Applications 4.1 { Radian and Degree Measure 1 Angles 2 Radian Measure Accelerated Pre-Calculus 4.1 { Radian and Degree Measure Mr. Niedert 2 / 27 4 Applications 4.1 { Radian and Degree Measure 1 Angles 2 Radian Measure 3 Degree Measure Accelerated Pre-Calculus 4.1 { Radian and Degree Measure Mr. Niedert 2 / 27 4.1 { Radian and Degree Measure 1 Angles 2 Radian Measure 3 Degree Measure 4 Applications Accelerated Pre-Calculus 4.1 { Radian and Degree Measure Mr. Niedert 2 / 27 The starting position of the ray is the initial side of the angle. The position after the rotation is the terminal side of the angle. The vertex of the angle is the endpoint of the ray. Angles An angle is determine by rotating a ray about it endpoint. Accelerated Pre-Calculus 4.1 { Radian and Degree Measure Mr. Niedert 3 / 27 The position after the rotation is the terminal side of the angle. The vertex of the angle is the endpoint of the ray. Angles An angle is determine by rotating a ray about it endpoint. The starting position of the ray is the initial side of the angle. Accelerated Pre-Calculus 4.1 { Radian and Degree Measure Mr. Niedert 3 / 27 The vertex of the angle is the endpoint of the ray. -
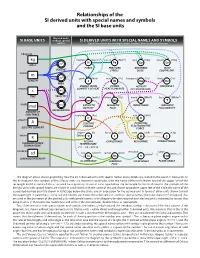
Relationships of the SI Derived Units with Special Names and Symbols and the SI Base Units
Relationships of the SI derived units with special names and symbols and the SI base units Derived units SI BASE UNITS without special SI DERIVED UNITS WITH SPECIAL NAMES AND SYMBOLS names Solid lines indicate multiplication, broken lines indicate division kilogram kg newton (kg·m/s2) pascal (N/m2) gray (J/kg) sievert (J/kg) 3 N Pa Gy Sv MASS m FORCE PRESSURE, ABSORBED DOSE VOLUME STRESS DOSE EQUIVALENT meter m 2 m joule (N·m) watt (J/s) becquerel (1/s) hertz (1/s) LENGTH J W Bq Hz AREA ENERGY, WORK, POWER, ACTIVITY FREQUENCY second QUANTITY OF HEAT HEAT FLOW RATE (OF A RADIONUCLIDE) s m/s TIME VELOCITY katal (mol/s) weber (V·s) henry (Wb/A) tesla (Wb/m2) kat Wb H T 2 mole m/s CATALYTIC MAGNETIC INDUCTANCE MAGNETIC mol ACTIVITY FLUX FLUX DENSITY ACCELERATION AMOUNT OF SUBSTANCE coulomb (A·s) volt (W/A) C V ampere A ELECTRIC POTENTIAL, CHARGE ELECTROMOTIVE ELECTRIC CURRENT FORCE degree (K) farad (C/V) ohm (V/A) siemens (1/W) kelvin Celsius °C F W S K CELSIUS CAPACITANCE RESISTANCE CONDUCTANCE THERMODYNAMIC TEMPERATURE TEMPERATURE t/°C = T /K – 273.15 candela 2 steradian radian cd lux (lm/m ) lumen (cd·sr) 2 2 (m/m = 1) lx lm sr (m /m = 1) rad LUMINOUS INTENSITY ILLUMINANCE LUMINOUS SOLID ANGLE PLANE ANGLE FLUX The diagram above shows graphically how the 22 SI derived units with special names and symbols are related to the seven SI base units. In the first column, the symbols of the SI base units are shown in rectangles, with the name of the unit shown toward the upper left of the rectangle and the name of the associated base quantity shown in italic type below the rectangle. -

Rotational Motion CONTENTS CHAPTER-OPENING QUESTION—Guess Now! 8–1 Angular Quantities a Solid Ball and a Solid Cylinder Roll Down a Ramp
You too can experience rapid rotation—if your stomach can take the high angular velocity and centripetal acceleration of some of the faster amusement park rides. If not, try the slower merry-go-round or Ferris wheel. Rotating carnival rides have rotational kinetic energy as well as angular momentum. Angular acceleration is produced by a net torque, and rotating objects have rotational kinetic energy. P T A E H R C 8 Rotational Motion CONTENTS CHAPTER-OPENING QUESTION—Guess now! 8–1 Angular Quantities A solid ball and a solid cylinder roll down a ramp. They both start from rest at the 8–2 Constant Angular Acceleration same time and place. Which gets to the bottom first? 8–3 Rolling Motion (a) They get there at the same time. (Without Slipping) (b) They get there at almost exactly the same time except for frictional differences. 8–4 Torque (c) The ball gets there first. 8–5 Rotational Dynamics; (d) The cylinder gets there first. Torque and Rotational Inertia (e) Can’t tell without knowing the mass and radius of each. 8–6 Solving Problems in Rotational Dynamics ntil now, we have been concerned mainly with translational motion. We 8–7 Rotational Kinetic Energy discussed the kinematics and dynamics of translational motion (the role 8–8 Angular Momentum and of force). We also discussed the energy and momentum for translational Its Conservation U *8–9 Vector Nature of motion. In this Chapter we will deal with rotational motion. We will discuss the Angular Quantities kinematics of rotational motion and then its dynamics (involving torque), as well as rotational kinetic energy and angular momentum (the rotational analog of linear momentum). -
Draft 9Th Edition of the SI Brochure
—————————————————————————— Bureau International des Poids et Mesures The International System of Units (SI) 9th edition 2019 —————————————————— 2 ▪ Draft of the ninth SI Brochure, 5 February 2018 The BIPM and the Metre Convention The International Bureau of Weights and Measures (BIPM) was set up by the Metre As of 20 May 2019, fifty Convention signed in Paris on 20 May 1875 by seventeen States during the final session of nine States were Members of this Convention: the diplomatic Conference of the Metre. This Convention was amended in 1921. Argentina, Australia, 2 Austria, Belgium, Brazil, The BIPM has its headquarters near Paris, in the grounds (43 520 m ) of the Pavillon de Bulgaria, Canada, Chile, Breteuil (Parc de Saint-Cloud) placed at its disposal by the French Government; its upkeep China, Colombia, Croatia, is financed jointly by the Member States of the Metre Convention. Czech Republic, Denmark, Egypt, Finland, The task of the BIPM is to ensure worldwide unification of measurements; its function is France, Germany, Greece, Hungary, India, Indonesia, thus to: Iran (Islamic Rep. of), • establish fundamental standards and scales for the measurement of the principal physical Iraq, Ireland, Israel, Italy, Japan, Kazakhstan, quantities and maintain the international prototypes; Kenya, Korea (Republic • carry out comparisons of national and international standards; of), Lithuania, Malaysia, • ensure the coordination of corresponding measurement techniques; Mexico, Montenegro, Netherlands, New • carry out and coordinate measurements of the fundamental physical constants relevant Zealand, Norway, to these activities. Pakistan, Poland, Portugal, Romania, The BIPM operates under the exclusive supervision of the International Committee for Russian Federation, Saudi Weights and Measures (CIPM) which itself comes under the authority of the General Arabia, Serbia, Singapore, Slovakia, Slovenia, South Conference on Weights and Measures (CGPM) and reports to it on the work accomplished Africa, Spain, Sweden, by the BIPM. -

ROTATION: a Review of Useful Theorems Involving Proper Orthogonal Matrices Referenced to Three- Dimensional Physical Space
Unlimited Release Printed May 9, 2002 ROTATION: A review of useful theorems involving proper orthogonal matrices referenced to three- dimensional physical space. Rebecca M. Brannon† and coauthors to be determined †Computational Physics and Mechanics T Sandia National Laboratories Albuquerque, NM 87185-0820 Abstract Useful and/or little-known theorems involving33× proper orthogonal matrices are reviewed. Orthogonal matrices appear in the transformation of tensor compo- nents from one orthogonal basis to another. The distinction between an orthogonal direction cosine matrix and a rotation operation is discussed. Among the theorems and techniques presented are (1) various ways to characterize a rotation including proper orthogonal tensors, dyadics, Euler angles, axis/angle representations, series expansions, and quaternions; (2) the Euler-Rodrigues formula for converting axis and angle to a rotation tensor; (3) the distinction between rotations and reflections, along with implications for “handedness” of coordinate systems; (4) non-commu- tivity of sequential rotations, (5) eigenvalues and eigenvectors of a rotation; (6) the polar decomposition theorem for expressing a general deformation as a se- quence of shape and volume changes in combination with pure rotations; (7) mix- ing rotations in Eulerian hydrocodes or interpolating rotations in discrete field approximations; (8) Rates of rotation and the difference between spin and vortici- ty, (9) Random rotations for simulating crystal distributions; (10) The principle of material frame indifference (PMFI); and (11) a tensor-analysis presentation of classical rigid body mechanics, including direct notation expressions for momen- tum and energy and the extremely compact direct notation formulation of Euler’s equations (i.e., Newton’s law for rigid bodies). -

Angles Are Inherently Neither Length Ratios Nor Dimensionless
Angles are inherently neither length ratios nor dimensionless Paul Quinceya, Peter J Mohrb and William D Phillipsb a National Physical Laboratory, Hampton Road, Teddington, TW11 0LW, United Kingdom b National Institute of Standards and Technology, Gaithersburg, MD 20899, USA Accepted for publication by Metrologia, 7 June 2019 Abstract The status of angles within The International System of Units (SI) has long been a source of controversy and confusion. We address one specific but crucial issue, putting the case that the idea of angles necessarily being length ratios, and hence dimensionless, is not valid. By making a clear distinction between the definition of a quantity and the process of making a measurement of that quantity, we show that the usual arguments for angles being length ratios are problematic. An appreciation of this point should clear away a major obstacle preventing a more proper treatment of the angle problem. Introduction One way to point out the odd status of angles within the SI is as follows: angle is measurable with a scale, on a protractor, in analogy to the way length is measureable with a ruler. It can therefore have units that are chosen by the user. This simple point is reinforced by the fact that multiple units for angle are used in practice. Angle measurements often use the degree, while the radian, which is used in mathematics and theoretical physics, is the SI unit. Other units, such as the grad, are used in specialised areas. And yet angle is treated as being dimensionless in the SI, a status usually applied only to quantities that are simply counted, like the number of molecules in a container, or quantities that are clearly a ratio of two values of the same quantity, such as refractive index. -

Investigation 6.6.2 - Gradian Measure
Investigation 6.6.2 - Gradian measure Have you ever wondered why we have 360 degrees in a circle when our number system is base 10? Why not divide the circle into 10 angular units? Or 100? The notion of the “degree” as the base angular unit of measure is generally attributed to the Babylonians. The Babylonian numerical system was sexagesimal (base 60). The number “360” played an essential role in their calendar as it is close to the number of days in a year. Another hypothesis is that the circle divides more naturally into six parts than it does four or ten. Try drawing diameters through a circle cutting it into even parts. I. 6 equal parts II. 4 equal parts III. 10 equal parts Then draw chords by connecting consecutive diameter endpoints. Which method produces equilateral triangles? Which dissected circle has chords congruent to its radius? Now find the central angle of each dissection. Which is most closely related to the Babylonian sexagesimal number system? Now suppose we wanted to derive an angular unit of measure more closely related to our base 10 decimal system. Let us begin by dividing a right angle into 100 units, called “gradians”. (You may have this system on your calculator, denoted “grad”.) a. How many gradians are in one whole circle? b. Convert 180° into gradians. c. How many degrees make 50 gradians? If societies in science fiction have differing number of days in their respective years due to different planetary orbits, it would stand to reason that their methods for measuring angles and circles might be different from our system.