1 Symmetries of Regular Polyhedra
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

In Order for the Figure to Map Onto Itself, the Line of Reflection Must Go Through the Center Point
3-5 Symmetry State whether the figure appears to have line symmetry. Write yes or no. If so, copy the figure, draw all lines of symmetry, and state their number. 1. SOLUTION: A figure has reflectional symmetry if the figure can be mapped onto itself by a reflection in a line. The figure has reflectional symmetry. In order for the figure to map onto itself, the line of reflection must go through the center point. Two lines of reflection go through the sides of the figure. Two lines of reflection go through the vertices of the figure. Thus, there are four possible lines that go through the center and are lines of reflections. Therefore, the figure has four lines of symmetry. eSolutionsANSWER: Manual - Powered by Cognero Page 1 yes; 4 2. SOLUTION: A figure has reflectional symmetry if the figure can be mapped onto itself by a reflection in a line. The given figure does not have reflectional symmetry. There is no way to fold or reflect it onto itself. ANSWER: no 3. SOLUTION: A figure has reflectional symmetry if the figure can be mapped onto itself by a reflection in a line. The given figure has reflectional symmetry. The figure has a vertical line of symmetry. It does not have a horizontal line of symmetry. The figure does not have a line of symmetry through the vertices. Thus, the figure has only one line of symmetry. ANSWER: yes; 1 State whether the figure has rotational symmetry. Write yes or no. If so, copy the figure, locate the center of symmetry, and state the order and magnitude of symmetry. -

Arxiv:Hep-Th/0510191V1 22 Oct 2005
Maximal Subgroups of the Coxeter Group W (H4) and Quaternions Mehmet Koca,∗ Muataz Al-Barwani,† and Shadia Al-Farsi‡ Department of Physics, College of Science, Sultan Qaboos University, PO Box 36, Al-Khod 123, Muscat, Sultanate of Oman Ramazan Ko¸c§ Department of Physics, Faculty of Engineering University of Gaziantep, 27310 Gaziantep, Turkey (Dated: September 8, 2018) The largest finite subgroup of O(4) is the noncrystallographic Coxeter group W (H4) of order 14400. Its derived subgroup is the largest finite subgroup W (H4)/Z2 of SO(4) of order 7200. Moreover, up to conjugacy, it has five non-normal maximal subgroups of orders 144, two 240, 400 and 576. Two groups [W (H2) × W (H2)]×Z4 and W (H3)×Z2 possess noncrystallographic structures with orders 400 and 240 respectively. The groups of orders 144, 240 and 576 are the extensions of the Weyl groups of the root systems of SU(3)×SU(3), SU(5) and SO(8) respectively. We represent the maximal subgroups of W (H4) with sets of quaternion pairs acting on the quaternionic root systems. PACS numbers: 02.20.Bb INTRODUCTION The noncrystallographic Coxeter group W (H4) of order 14400 generates some interests [1] for its relevance to the quasicrystallographic structures in condensed matter physics [2, 3] as well as its unique relation with the E8 gauge symmetry associated with the heterotic superstring theory [4]. The Coxeter group W (H4) [5] is the maximal finite subgroup of O(4), the finite subgroups of which have been classified by du Val [6] and by Conway and Smith [7]. -

Crystal Symmetry Groups
X-Ray and Neutron Crystallography rational numbers is a group under Crystal Symmetry Groups multiplication, and both it and the integer group already discussed are examples of infinite groups because they each contain an infinite number of elements. ymmetry plays an important role between the integers obey the rules of In the case of a symmetry group, in crystallography. The ways in group theory: an element is the operation needed to which atoms and molecules are ● There must be defined a procedure for produce one object from another. For arrangeds within a unit cell and unit cells example, a mirror operation takes an combining two elements of the group repeat within a crystal are governed by to form a third. For the integers one object in one location and produces symmetry rules. In ordinary life our can choose the addition operation so another of the opposite hand located first perception of symmetry is what that a + b = c is the operation to be such that the mirror doing the operation is known as mirror symmetry. Our performed and u, b, and c are always is equidistant between them (Fig. 1). bodies have, to a good approximation, elements of the group. These manipulations are usually called mirror symmetry in which our right side ● There exists an element of the group, symmetry operations. They are com- is matched by our left as if a mirror called the identity element and de- bined by applying them to an object se- passed along the central axis of our noted f, that combines with any other bodies. -

The Cubic Groups
The Cubic Groups Baccalaureate Thesis in Electrical Engineering Author: Supervisor: Sana Zunic Dr. Wolfgang Herfort 0627758 Vienna University of Technology May 13, 2010 Contents 1 Concepts from Algebra 4 1.1 Groups . 4 1.2 Subgroups . 4 1.3 Actions . 5 2 Concepts from Crystallography 6 2.1 Space Groups and their Classification . 6 2.2 Motions in R3 ............................. 8 2.3 Cubic Lattices . 9 2.4 Space Groups with a Cubic Lattice . 10 3 The Octahedral Symmetry Groups 11 3.1 The Elements of O and Oh ..................... 11 3.2 A Presentation of Oh ......................... 14 3.3 The Subgroups of Oh ......................... 14 2 Abstract After introducing basics from (mathematical) crystallography we turn to the description of the octahedral symmetry groups { the symmetry group(s) of a cube. Preface The intention of this account is to provide a description of the octahedral sym- metry groups { symmetry group(s) of the cube. We first give the basic idea (without proofs) of mathematical crystallography, namely that the 219 space groups correspond to the 7 crystal systems. After this we come to describing cubic lattices { such ones that are built from \cubic cells". Finally, among the cubic lattices, we discuss briefly the ones on which O and Oh act. After this we provide lists of the elements and the subgroups of Oh. A presentation of Oh in terms of generators and relations { using the Dynkin diagram B3 is also given. It is our hope that this account is accessible to both { the mathematician and the engineer. The picture on the title page reflects Ha¨uy'sidea of crystal structure [4]. -

324 COHOMOLOGY of DIHEDRAL GROUPS of ORDER 2P Let D Be A
324 PHYLLIS GRAHAM [March 2. P. M. Cohn, Unique factorization in noncommutative power series rings, Proc. Cambridge Philos. Soc 58 (1962), 452-464. 3. Y. Kawada, Cohomology of group extensions, J. Fac. Sci. Univ. Tokyo Sect. I 9 (1963), 417-431. 4. J.-P. Serre, Cohomologie Galoisienne, Lecture Notes in Mathematics No. 5, Springer, Berlin, 1964, 5. , Corps locaux et isogênies, Séminaire Bourbaki, 1958/1959, Exposé 185 6. , Corps locaux, Hermann, Paris, 1962. UNIVERSITY OF MICHIGAN COHOMOLOGY OF DIHEDRAL GROUPS OF ORDER 2p BY PHYLLIS GRAHAM Communicated by G. Whaples, November 29, 1965 Let D be a dihedral group of order 2p, where p is an odd prime. D is generated by the elements a and ]3 with the relations ap~fi2 = 1 and (ial3 = or1. Let A be the subgroup of D generated by a, and let p-1 Aoy Ai, • • • , Ap-\ be the subgroups generated by j8, aft, • * • , a /3, respectively. Let M be any D-module. Then the cohomology groups n n H (A0, M) and H (Aif M), i=l, 2, • • • , p — 1 are isomorphic for 1 l every integer n, so the eight groups H~ (Df Af), H°(D, M), H (D, jfef), 2 1 Q # (A Af), ff" ^. M), H (A, M), H-Wo, M), and H»(A0, M) deter mine all cohomology groups of M with respect to D and to all of its subgroups. We have found what values this array takes on as M runs through all finitely generated -D-modules. All possibilities for the first four members of this array are deter mined as a special case of the results of Yang [4]. -

Dihedral Groups Ii
DIHEDRAL GROUPS II KEITH CONRAD We will characterize dihedral groups in terms of generators and relations, and describe the subgroups of Dn, including the normal subgroups. We will also introduce an infinite group that resembles the dihedral groups and has all of them as quotient groups. 1. Abstract characterization of Dn −1 −1 The group Dn has two generators r and s with orders n and 2 such that srs = r . We will show every group with a pair of generators having properties similar to r and s admits a homomorphism onto it from Dn, and is isomorphic to Dn if it has the same size as Dn. Theorem 1.1. Let G be generated by elements x and y where xn = 1 for some n ≥ 3, 2 −1 −1 y = 1, and yxy = x . There is a surjective homomorphism Dn ! G, and if G has order 2n then this homomorphism is an isomorphism. The hypotheses xn = 1 and y2 = 1 do not mean x has order n and y has order 2, but only that their orders divide n and divide 2. For instance, the trivial group has the form hx; yi where xn = 1, y2 = 1, and yxy−1 = x−1 (take x and y to be the identity). Proof. The equation yxy−1 = x−1 implies yxjy−1 = x−j for all j 2 Z (raise both sides to the jth power). Since y2 = 1, we have for all k 2 Z k ykxjy−k = x(−1) j by considering even and odd k separately. Thus k (1.1) ykxj = x(−1) jyk: This shows each product of x's and y's can have all the x's brought to the left and all the y's brought to the right. -

Chapter 1 – Symmetry of Molecules – P. 1
Chapter 1 – Symmetry of Molecules – p. 1 - 1. Symmetry of Molecules 1.1 Symmetry Elements · Symmetry operation: Operation that transforms a molecule to an equivalent position and orientation, i.e. after the operation every point of the molecule is coincident with an equivalent point. · Symmetry element: Geometrical entity (line, plane or point) which respect to which one or more symmetry operations can be carried out. In molecules there are only four types of symmetry elements or operations: · Mirror planes: reflection with respect to plane; notation: s · Center of inversion: inversion of all atom positions with respect to inversion center, notation i · Proper axis: Rotation by 2p/n with respect to the axis, notation Cn · Improper axis: Rotation by 2p/n with respect to the axis, followed by reflection with respect to plane, perpendicular to axis, notation Sn Formally, this classification can be further simplified by expressing the inversion i as an improper rotation S2 and the reflection s as an improper rotation S1. Thus, the only symmetry elements in molecules are Cn and Sn. Important: Successive execution of two symmetry operation corresponds to another symmetry operation of the molecule. In order to make this statement a general rule, we require one more symmetry operation, the identity E. (1.1: Symmetry elements in CH4, successive execution of symmetry operations) 1.2. Systematic classification by symmetry groups According to their inherent symmetry elements, molecules can be classified systematically in so called symmetry groups. We use the so-called Schönfliess notation to name the groups, Chapter 1 – Symmetry of Molecules – p. 2 - which is the usual notation for molecules. -

Pose Estimation for Objects with Rotational Symmetry
Pose Estimation for Objects with Rotational Symmetry Enric Corona, Kaustav Kundu, Sanja Fidler Abstract— Pose estimation is a widely explored problem, enabling many robotic tasks such as grasping and manipulation. In this paper, we tackle the problem of pose estimation for objects that exhibit rotational symmetry, which are common in man-made and industrial environments. In particular, our aim is to infer poses for objects not seen at training time, but for which their 3D CAD models are available at test time. Previous X 2 X 1 X 2 X 1 work has tackled this problem by learning to compare captured Y ∼ 2 Y ∼ 2 Y ∼ 2 Y ∼ 2 views of real objects with the rendered views of their 3D CAD Z ∼ 6 Z ∼ 1 Z ∼ Z ∼ 1 ∼ ∼ ∼ ∞ ∼ models, by embedding them in a joint latent space using neural Fig. 1. Many industrial objects such as various tools exhibit rotational networks. We show that sidestepping the issue of symmetry symmetries. In our work, we address pose estimation for such objects. in this scenario during training leads to poor performance at test time. We propose a model that reasons about rotational symmetry during training by having access to only a small set of that this is not a trivial task, as the rendered views may look symmetry-labeled objects, whereby exploiting a large collection very different from objects in real images, both because of of unlabeled CAD models. We demonstrate that our approach different background, lighting, and possible occlusion that significantly outperforms a naively trained neural network on arise in real scenes. -

Molecular Symmetry
Molecular Symmetry 1 I. WHAT IS SYMMETRY AND WHY IT IS IMPORTANT? Some object are ”more symmetrical” than others. A sphere is more symmetrical than a cube because it looks the same after rotation through any angle about the diameter. A cube looks the same only if it is rotated through certain angels about specific axes, such as 90o, 180o, or 270o about an axis passing through the centers of any of its opposite faces, or by 120o or 240o about an axis passing through any of the opposite corners. Here are also examples of different molecules which remain the same after certain symme- try operations: NH3, H2O, C6H6, CBrClF . In general, an action which leaves the object looking the same after a transformation is called a symmetry operation. Typical symme- try operations include rotations, reflections, and inversions. There is a corresponding symmetry element for each symmetry operation, which is the point, line, or plane with respect to which the symmetry operation is performed. For instance, a rotation is carried out around an axis, a reflection is carried out in a plane, while an inversion is carried our in a point. We shall see that we can classify molecules that possess the same set of symmetry ele- ments, and grouping together molecules that possess the same set of symmetry elements. This classification is very important, because it allows to make some general conclusions about molecular properties without calculation. Particularly, we will be able to decide if a molecule has a dipole moment, or not and to know in advance the degeneracy of molecular states. -
12-5 Worksheet Part C
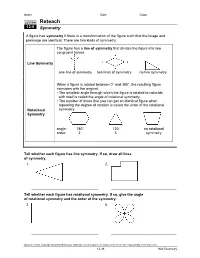
Name ________________________________________ Date __________________ Class__________________ LESSON Reteach 12-5 Symmetry A figure has symmetry if there is a transformation of the figure such that the image and preimage are identical. There are two kinds of symmetry. The figure has a line of symmetry that divides the figure into two congruent halves. Line Symmetry one line of symmetry two lines of symmetry no line symmetry When a figure is rotated between 0° and 360°, the resulting figure coincides with the original. • The smallest angle through which the figure is rotated to coincide with itself is called the angle of rotational symmetry. • The number of times that you can get an identical figure when repeating the degree of rotation is called the order of the rotational Rotational symmetry. Symmetry angle: 180° 120° no rotational order: 2 3 symmetry Tell whether each figure has line symmetry. If so, draw all lines of symmetry. 1. 2. _________________________________________ ________________________________________ Tell whether each figure has rotational symmetry. If so, give the angle of rotational symmetry and the order of the symmetry. 3. 4. _________________________________________ ________________________________________ Original content Copyright © by Holt McDougal. Additions and changes to the original content are the responsibility of the instructor. 12-38 Holt Geometry Name ________________________________________ Date __________________ Class__________________ LESSON Reteach 12-5 Symmetry continued Three-dimensional figures can also have symmetry. Symmetry in Three Description Example Dimensions A plane can divide a figure into two Plane Symmetry congruent halves. There is a line about which a figure Symmetry About can be rotated so that the image and an Axis preimage are identical. -
Symmetry and Groups, and Crystal Structures
CHAPTER 3: SYMMETRY AND GROUPS, AND CRYSTAL STRUCTURES Sarah Lambart RECAP CHAP. 2 2 different types of close packing: hcp: tetrahedral interstice (ABABA) ccp: octahedral interstice (ABCABC) Definitions: The coordination number or CN is the number of closest neighbors of opposite charge around an ion. It can range from 2 to 12 in ionic structures. These structures are called coordination polyhedron. RECAP CHAP. 2 Rx/Rz C.N. Type Hexagonal or An ideal close-packing of sphere 1.0 12 Cubic for a given CN, can only be Closest Packing achieved for a specific ratio of 1.0 - 0.732 8 Cubic ionic radii between the anions and 0.732 - 0.414 6 Octahedral Tetrahedral (ex.: the cations. 0.414 - 0.225 4 4- SiO4 ) 0.225 - 0.155 3 Triangular <0.155 2 Linear RECAP CHAP. 2 Pauling’s rule: #1: the coodination polyhedron is defined by the ratio Rcation/Ranion #2: The Electrostatic Valency (e.v.) Principle: ev = Z/CN #3: Shared edges and faces of coordination polyhedra decreases the stability of the crystal. #4: In crystal with different cations, those of high valency and small CN tend not to share polyhedral elements #5: The principle of parsimony: The number of different sites in a crystal tends to be small. CONTENT CHAP. 3 (2-3 LECTURES) Definitions: unit cell and lattice 7 Crystal systems 14 Bravais lattices Element of symmetry CRYSTAL LATTICE IN TWO DIMENSIONS A crystal consists of atoms, molecules, or ions in a pattern that repeats in three dimensions. The geometry of the repeating pattern of a crystal can be described in terms of a crystal lattice, constructed by connecting equivalent points throughout the crystal. -

MAT313 Fall 2017 Practice Midterm II the Actual Midterm Will Consist of 5-6 Problems
MAT313 Fall 2017 Practice Midterm II The actual midterm will consist of 5-6 problems. It will be based on subsections 127-234 from sections 6-11. This is a preliminary version. I might add few more problems to make sure that all important concepts and methods are covered. Problem 1. 2 Let P be a set of lines through 0 in R . The group SL(2; R) acts on X by linear transfor- mations. Let H be the stabilizer of a line defined by the equation y = 0. (1) Describe the set of matrices H. (2) Describe the orbits of H in X. How many orbits are there? (3) Identify X with the set of cosets of SL(2; R). Solution. (1) Denote the set of lines by P = fLm;ng, where Lm;n is equal to f(x; y)jmx+ny = 0g. a b Note that Lkm;kn = Lm;n if k 6= 0. Let g = c d , ad − bc = 1 be an element of SL(2; R). Then gLm;n = f(x; y)jm(ax + by) + n(cx + dy) = 0g = Lma+nc;mb+nd. a b By definition the line f(x; y)jy = 0g is equal to L0;1. Then c d L0;1 = Lc;d. The line Lc;d coincides with L0;1 if c = 0. Then the stabilizer Stab(L0;1) coincides with a b H = f 0 d g ⊂ SL(2; R). (2) We already know one trivial H-orbit O = fL0;1g. The complement PnfL0;1g is equal to fLm:njm 6= 0g = fL1:n=mjm 6= 0g = fL1:tg.