Intentional Actions, Plans, and Information Systems
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

River Mileages and Drainage Areas for Illinois Streams—Volume 2, Illinois River Basin
RIVER MILEAGES AND DRAINAGE AREAS FOR ILLINOIS STREAMS—VOLUME 2, ILLINOIS RIVER BASIN U.S. GEOLOGICAL SURVEY Water-Resources Investigations Report 79-111 Prepared in cooperation with the U.S. ARMY CORPS OF ENGINEERS RIVER MILEAGES AND DRAINAGE AREAS FOR ILLINOIS STREAMS—VOLUME 2, ILLINOIS RIVER BASIN By R. W. Healy U.S. GEOLOGICAL SURVEY Water-Resources Investigations Report 79-111 Prepared in cooperation with the U.S. ARMY CORPS OF ENGINEERS 1979 CONTENTS Conversion Table . .iv Abstract . .1 Introduction . .1 Methods . .2 Explanation of tables . .2 References . .3 Index . .291 ILLUSTRATIONS Figure 1. Map showing Illinois counties . .4 2. Map showing stream systems, hydrologic units, and major cities in Illinois. .6 TABLE Table 1. River mileages and drainage areas for Illinois streams . .8 i CONVERSION TABLE Multiply inch-pound unit By To obtain SI (metric) unit mile (mi) 1.609 kilometer (km) square mile (mi2) 2.590 square kilometer (km2) iv RIVER MILEAGES AND DRAINAGE FOR ILLINOIS STREAMS— Volume 2, Illinois River Basin By R. W. Healy ABSTRACT River mileages are presented for points of interest on Illinois streams draining 10 square miles or more. Points of interest include bridges, dams, gaging stations, county lines, hydrologic unit boundaries, and major tributaries. Drainage areas are presented for selected sites, including total drainage area for any streams draining at least 100 square miles. INTRODUCTION Expansion of water-resource investigations within the State of Illinois has amplified the need for a common index to locations on streams. A common index would aid in the coordination of various stream-related activities by facilitating data collection and interpretation. -

2020 Final Budget Book.Indb
456 PAGE INTENTIONALLY LEFT BLANK The Government Finance Offi cers Association of the United States and Canada (GFOA) presented a Distinguished Budget Presentation Award to the Illinois State Toll Highway Authority for the Annual Budget beginning January 2019. In order to receive this award, a governmental unit must publish a budget document that meets program criteria as a policy document, operations guide, fi nancial plan and communications device. For questions regarding the 2020 Budget Book, please contact: Michael Colsch Cathy Williams Sam Samra Chief Financial Offi cer Deputy Chief of Finance Capital Budget Manager Phone: 630-241-6800 TABLE OF CONTENTS TABLE OF CONTENTS Section Page Executive Lett er .......................................................................................................................................................................... 1 Executive Summary ................................................................................................................................................................... 3 Tollway Organization and Background ................................................................................................................................. 7 Revenue Sources and Underlying Assumptions ................................................................................................................. 13 Fund Structure ......................................................................................................................................................................... -
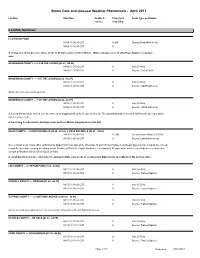
Storm Data and Unusual Weather Phenomena - April 2013
Storm Data and Unusual Weather Phenomena - April 2013 Location Date/Time Deaths & Property & Event Type and Details Injuries Crop Dmg ILLINOIS, Northeast (IL-Z013) DU PAGE 04/08/13 08:39 CST 0.50K Strong Wind (MAX 48 kt) 04/08/13 08:39 CST 0 A strong area of low pressure drove winds to 50 mph across northern Illinois. Minor damage occurred at DuPage Airport on a hanger door. WINNEBAGO COUNTY --- 0.9 SE THE LEDGES [42.41, -88.99] 04/09/13 07:30 CST 0 Hail (0.88 in) 04/09/13 07:40 CST 0 Source: CoCoRaHS WINNEBAGO COUNTY --- 1.5 E THE LEDGES [42.42, -88.97] 04/09/13 07:30 CST 0 Hail (0.88 in) 04/09/13 07:40 CST 0 Source: COOP Observer Nickel size hail covered the ground. WINNEBAGO COUNTY --- 1.5 E THE LEDGES [42.42, -88.97] 04/09/13 08:30 CST 0 Hail (0.88 in) 04/09/13 08:40 CST 0 Source: COOP Observer A second thunderstorm moved over the same area dropping hail up to the size of nickels. The ground was still covered in hail from the previous storm about an hour earlier. A few strong thunderstorms developed over northern Illinois dropping nickel size hail. OGLE COUNTY --- 3.0 ESE ROCHELLE [41.90, -89.02], 2.4 ESE ROCHELLE [41.91, -89.02] 04/10/13 05:40 CST 0.15M Thunderstorm Wind (EG 50 kt) 04/10/13 05:40 CST 0 Source: Law Enforcement Over a dozen semi trucks either jackknifed or flipped onto their side at the Interstate 39 and 88 interchange in southeast Ogle County. -

Chapter 15 – Traffic and Vehicles
Chapter 15 – Traffic and Vehicles Chapter 15 - TRAFFIC AND VEHICLES Sec. 15-A TRAFFIC CONTROL Sec. 15-A-1 Ratification of Existing Traffic Control Signs, Signals, Markings All traffic control signs, signals, devices and markings which are in place on the adoption of this Code are hereby ratified and confirmed. (Code 1979, § 14-1) State Law reference — Powers of local authorities generally, 625 ILCS 5/11-208; power of County Board to restrict use of highways due to climatic conditions, 625 ILCS 5/15-316(a); signs required, 625 ILCS 5/15-316(b). Sec. 15-A-2 Permits for Overwidth, Overlength and Overweight Vehicles A. The state has set maximum legal height, width, and weight limitations on all classes of highways in the state as published in the Illinois Vehicle Code 625 ILCS Chapter 15. B. The County highways are classified as class II, III and local road and streets and so designated and are under the jurisdiction and authority of the County Board. C. The Illinois Vehicle Code 625 ILCS Section 5/11-208 authorizes the County Board to enact restrictions as to the use of their highways concerning size, weight, and local regulations. As such vehicles weighing over 54,000 pounds gross weight, are prohibited from using the following roads when appropriate signage is posted at both ends of the following roads: 1. Perry Road from Shabbona Road to South First Street 2. Suydam Road from 701 feet west of Rollo Road proceeding on to West Suydam Road to South County Line. Such prohibition does not extend to police, fire or other emergency vehicles or school buses or those vehicles which are making service calls, pickups or deliveries to residences, farms and construction sites on or adjacent to the roadways. -

Agenda Packet
CITY OF CRYSTAL LAKE AGENDA CITY COUNCIL REGULAR MEETING City of Crystal Lake 100 West Woodstock Street, Crystal Lake, IL City Council Chambers September 7, 2010 7:30 p.m. 1. Call to Order 2. Roll Call 3. Pledge of Allegiance 4. Proclamations a. Chamber of Commerce Week b. Constitution Week 5. Approval of Minutes - August 17, 2010 Regular City Council Meeting 6. Accounts Payable 7. Public Presentation The public is invited to make an issue oriented comment on any matter of public concern not otherwise on the agenda. The public comment may be no longer than 5 minutes in duration. Interrogation of the city staff, Mayor or City Council will not be allowed at this time, nor will any comment from the Council. Personal invectives against city staff or elected officials are not permitted. 8. Mayor's Report 9. Council Reports 10. Consent Agenda a. Park Place Townhomes, west of Randall Road at Alexandra Boulevard – Final Planned Unit Development Amendment Continuation. b. Extension of the Final Planned Unit Development approval for Kentucky Fried Chicken, 6280 Northwest Highway. c. The Salvation Army request to use McCormick Park on November 18, 2010. 11. Crystal Lake Buick GMC, 6305 Northwest Highway – Temporary Use Permit request for 2010-2011 Special Promotions. 12. Crystal Lake Chevrolet, 5220 Northwest Highway – Temporary Use Permit request for a Grand Opening Special Promotion. 13. Immanuel Lutheran Church, 300 Pathway Court – Class “16” Temporary Liquor License request. 14. Immanuel Lutheran Church, 300 Pathway Court – Request to temporarily suspend no-parking restrictions on the east side of Pathway Court and the south side of Teckler Boulevard on September 12, 2010. -
Eastern Corridor Study, Answer Questions, and Receive Input on the Alignments
EASTERN DSATS CORRIDOR STUDY FINAL October 28, 2009 Executive Summary The DeKalb-Sycamore Area Transportation Study (DSATS) initiated this study to identify four possible alignments for a new north-south transportation corridor to service the eastern DSATS planning area. Initially, nine alternatives were created within termini specified by DSATS using Illinois Department of Transportation geometric design criteria and evaluating current land use, published future land use plans, topography, and floodplain and wetland maps within the study area. The termini of the proposed alignments for the corridor were Plank Road to the north and Gurler Road to the south. The following improvements were proposed for each corridor: a grade separated crossing with the Union Pacific Railroad; structures where the corridor crossed the East Branch Kishwaukee River and Union Ditches 1, 2, or 3; a full access interchange where the corridor intersects Interstate 88; and intersection improvements with the existing roadways. The nine potential alignments for an eastern DSATS corridor were evaluated at a design charrette that was attended by representatives from DSATS, the City of DeKalb, the City of Sycamore, the Town of Cortland, the Illinois State Toll Highway Authority, and the DeKalb County Highway Department. The alignments were ranked against screening criteria that included mobility, local access, compatibility with local land use plans, encouragement of economic development, regional access and system connectivity, environmental impacts, farmland impacts, and use of existing alignments. Based on the group discussion and the total scores obtained, several alignments were selected for further analysis. The Illinois Department of Transportation, Illinois State Toll Highway Authority and the Union Pacific Railroad were contacted to obtain their feedback on the eastern DSATS corridor study. -

City of Ottawa Bicycle Plan
CITY OF OTTAWA BICYCLE PLAN June 5, 2012 City of Ottawa, Illinois League of Illinois Bicyclists 301 W. Madison Street 2550 Cheshire Drive Ottawa, IL 61350 Aurora, IL 60504 (815) 433-0161 (630) 978-0583 CITY OF OTTAWA BICYCLE PLAN Executive Summary The City of Ottawa has developed this plan to become a safer, more pleasant place for residents and visitors who bicycle, whether for recreation or for transportation, by choice or by necessity. By completing this plan, Ottawa joins an increasing number of Illinois cities desiring to be bike- friendly – and puts the City in better position to win future bikeway and trail grants. Detailed recommendations specify a preferred network for bicycle travel throughout the City, while education, encouragement, and enforcement resources are identified to leverage infrastructure investments and further improve bicycling conditions. A grid of “routes to study” came from City staff and consultant, the City’s Bike Path Committee, and a public brainstorming workshop. Each potential network segment was objectively analyzed for the most appropriate bikeway type based on feasibility, safety, implementation cost, and other technical and strategic factors. In some cases, the plan called for off-road bikeways and trails. However, in many others, an on- road designated bikeway was deemed best, for the above reasons. This is counterintuitive to most people (especially non-cyclists), so the plan explains intersection and car-bike safety dynamics to justify its on-road recommendations. While the plan’s primary audience is the casual adult bicyclist, the plan addresses the lower mental and physical capabilities of children by calling for continuous sidewalks along roads with an on-road recommendation. -

City of Streator Comprehensive Plan
City of Streator Comprehensive Plan February 21, 2014 City of Streator Comprehensive Plan Acknowledgements ACKNOWLEDGEMENTS City Council Jimmie Lansford, Mayor Edgar Brozak Bruce Hart William Phelan Tara Iverson-Bedei Plan Commission Jerry O'Kraski Dick Pierce Doug Patterson Dean Chalkey Jeff Hatzer Harry Godfrey Robert Gubbles City Staff Paul Nicholson, City Manager Jeremy Palm, City Engineer Pamela Leonard, Clerk/Treasurer Consultant Staff VANDEWALLE & ASSOCIATES Jessica Schmiedicke, AICP, Project Manager Scott Harrington, AICP, Principal-in-Charge Jackie Mich, Assistant Planner Dan Eckberg, GIS Technician Nicole Anderson, Project Assistant 120 East Lakeside Street Madison, WI 53715 (608) 255-3988 www.vandewalle.com North Central Illinois Council of Governments The North Central Illinois Council of Governments assisted the City with the preparation of the 2007 Comprehensive Plan. Much of the content from that Plan was used in this updated document. February 21, 2014 i | Page City of Streator Comprehensive Plan Table of Contents TABLE OF CONTENTS Chapter One: Introduction ............................................................................................................ 1 Chapter Two: Issues and Opportunities ........................................................................................ 5 Chapter Three: Land Use ............................................................................................................ 31 Chapter Four: Housing .............................................................................................................. -

2002 Comprehensive Plan
June 4, 2002 Comprehensive Plan the city of Volume 1 two rivers Table of Contents Chapter 1: Introduction .................................................................... 1 The City of Ottawa Plan Commission Planning Team Chapter 2: Goals and Objectives...................................................... 6 Chapter 3: History........................................................................... 10 Ottawa Today Chapter 4: Existing Land Use ......................................................... 16 Location Transportation Parks and Open Space Chapter 5: Future Land Use........................................................... 42 Agricultural Preservation Conservation Parks Highway Greenbelt Corridors Open Space Conservation Areas Mixed-Use Corridor / Neighborhood Center District Industrial / Warehouse / Light Manufacturing Civic Uses Highway Business Commercial Traditional Neighborhood Residential Hamlet Neighborhood Residential Rural Residential Chapter 6: Sub-Areas ...................................................................... 47 State Routes 23 and 71 Interstate 80 and State Route 23 Corridors Interstate 80 and State Route 71 Intersection of State Route 23 and Fosse Road and Southeast Neighborhood Chapter 7: Implementation of the Plan ........................................ 50 Appendix A: Demographics............................................................... 53 Population Age Trends Median Age Appendix B: Public Involvement....................................................... 55 Image Preference Survey Questionnaire -

Public Disclosure Community Reinvestment Act
Comptroller of the Currency Administrator of National Banks PUBLIC DISCLOSURE June 13, 1997 COMMUNITY REINVESTMENT ACT PERFORMANCE EVALUATION First National Bank of Ottawa Charter No. 1154 701 LaSalle Street Ottawa, IL. 61350 Office of the Comptroller of the Currency 111 West Washington Street, Suite 300 Peoria, IL. 61611 NOTE: This evaluation is not, nor should it be construed as, an assessment of the financial condition of this institution. The rating assigned to this institution does not represent an analysis, conclusion or opinion of the federal financial supervisory agency concerning the safety and soundness of this financial institution. GENERAL INFORMATION The Community Reinvestment Act (CRA) requires each federal financial supervisory agency to use its authority when examining financial institutions subject to its supervision, to assess the institution's record of meeting the credit needs of its entire community, including low- and moderate-income neighborhoods, consistent with safe and sound operation of the institution. Upon conclusion of such examination, the agency must prepare a written evaluation of the institution's record of meeting the credit needs of its community. This document is an evaluation of the Community Reinvestment Act (CRA) performance of First National Bank of Ottawa prepared by the Office of the Comptroller of the Currency, the institution's supervisory agency, as of June 13, 1997. This evaluation is based on information from the last CRA examination dated December 5, 1994 to the current examination dated June 13, 1997. The agency rates the CRA performance of an institution consistent with the provisions set forth in Appendix A to 12 CFR Part 25. -

April 1, 2021
Note: These minutes are not official until approved by the Highway Committee at a subsequent meeting. Please refer to the meeting minutes when these minutes are approved to obtain any changes to these minutes. DeKalb County Government Sycamore, Illinois Highway Committee Minutes April 1, 2021 A Zoom public meeting of the Highway Committee of the DeKalb County Board was held on Thursday, April 1, 2021, at 6:00pm. Chairman Plote called the meeting to order at 6:06pm and called for the roll. Committee members present were Mr. Deutsch, Ms. Jones, Vice Chair Luebke and Ms. Willis. Mr. Osland joined the meeting at 6:16pm. Ms. Emmer was absent. The County Engineer, Mr. Nathan Schwartz, Mr. Wayne Davey, Support Services Manager, County Board Member Kathy Lampkins and one other guest were also present. APPROVAL OF AGENDA: Motion made by Vice Chair Luebke and seconded by Mr. Deutsch to approve the agenda but amend it by removing #R2021-27: Award Resolution for 2021 County Hot-Mix Resurface Projects listed under item 3. These County projects were selected for TARP funding and will be presented at a later date. The motion to approve the agenda as amended passed with five yes votes, zero no votes with a roll call vote. APPROVAL OF MINUTES: Ms. Willis moved and Vice Chair Luebke seconded a motion to approve the minutes of the March 4, 2021 regular meeting. The motion passed with five yes votes and zero no votes, with a roll call vote. PUBLIC COMMENTS: None RESOLUTION #R2021-24: APPROPRIATON OF MFT FUNDS FOR CHICAGO ROAD, SOUTH FIRST STREET, PERRY ROAD AND WATERMAN ROAD PAVING PROJECTS Mr. -

DRAFT Front Cover Photo
DRAFT Front Cover Photo: DRAFT Proposed 2019-2023 Transportation Program for McHenry County prepared by McHenry County Division of Transportation 16111 Nelson Road endorsed by the Woodstock, Illinois 60098 Transportation Committee of the McHenry County Board 815/ 334-4960 Thomas Wilbeck – District 1 www.co.mchenry.il.us/county-government/departments-j-z/transportation Jeffrey Thorsen, Vice-Chair – District 2 DRAFT Joseph Gottemoller, Chair – District 3 Mission Statement Donald Kopsell – District 3 The McHenry County Division of Transportation promotes responsible Craig Wilcox – District 4 public policy, ethical and high quality services and is dedicated to providing enhanced mobility while promoting a safe and efficient Michael Skala – District 5 transportation system. Jim Kearns – District 6 Table of Contents 1. Executive Summary ..................................................................................................... 1 McHenry County 2040 Long-Range Transportation Plan .............................................. 2 ON TO 2050 ...................................................................................................... 8 2017-2020 Strategic Plan for McHenry County ........................................................... 9 2018 Highlights .................................................................................................. 9 2019-2023 Program Highlights ............................................................................... 9 2019-2023 Program Development ..........................................................................