Inharmonicity in the Natural Mode Frequencies of Overwound Strings
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

African Music Vol 6 No 2(Seb).Cdr
94 JOURNAL OF INTERNATIONAL LIBRARY OF AFRICAN MUSIC THE GORA AND THE GRAND’ GOM-GOM: by ERICA MUGGLESTONE 1 INTRODUCTION For three centuries the interest of travellers and scholars alike has been aroused by the gora, an unbraced mouth-resonated musical bow peculiar to South Africa, because it is organologically unusual in that it is a blown chordophone.2 A split quill is attached to the bowstring at one end of the instrument. The string is passed through a hole in one end of the quill and secured; the other end of the quill is then bound or pegged to the stave. The string is lashed to the other end of the stave so that it may be tightened or loosened at will. The player holds the quill lightly bet ween his parted lips, and, by inhaling and exhaling forcefully, causes the quill (and with it the string) to vibrate. Of all the early descriptions of the gora, that of Peter Kolb,3 a German astronom er who resided at the Cape of Good Hope from 1705 to 1713, has been the most contentious. Not only did his character and his publication in general come under attack, but also his account of Khoikhoi4 musical bows in particular. Kolb’s text indicates that two types of musical bow were observed, to both of which he applied the name gom-gom. The use of the same name for both types of bow and the order in which these are described in the text, seems to imply that the second type is a variant of the first. -

Lab 12. Vibrating Strings
Lab 12. Vibrating Strings Goals • To experimentally determine the relationships between the fundamental resonant frequency of a vibrating string and its length, its mass per unit length, and the tension in the string. • To introduce a useful graphical method for testing whether the quantities x and y are related by a “simple power function” of the form y = axn. If so, the constants a and n can be determined from the graph. • To experimentally determine the relationship between resonant frequencies and higher order “mode” numbers. • To develop one general relationship/equation that relates the resonant frequency of a string to the four parameters: length, mass per unit length, tension, and mode number. Introduction Vibrating strings are part of our common experience. Which as you may have learned by now means that you have built up explanations in your subconscious about how they work, and that those explanations are sometimes self-contradictory, and rarely entirely correct. Musical instruments from all around the world employ vibrating strings to make musical sounds. Anyone who plays such an instrument knows that changing the tension in the string changes the pitch, which in physics terms means changing the resonant frequency of vibration. Similarly, changing the thickness (and thus the mass) of the string also affects its sound (frequency). String length must also have some effect, since a bass violin is much bigger than a normal violin and sounds much different. The interplay between these factors is explored in this laboratory experi- ment. You do not need to know physics to understand how instruments work. In fact, in the course of this lab alone you will engage with material which entire PhDs in music theory have been written. -

The Science of String Instruments
The Science of String Instruments Thomas D. Rossing Editor The Science of String Instruments Editor Thomas D. Rossing Stanford University Center for Computer Research in Music and Acoustics (CCRMA) Stanford, CA 94302-8180, USA [email protected] ISBN 978-1-4419-7109-8 e-ISBN 978-1-4419-7110-4 DOI 10.1007/978-1-4419-7110-4 Springer New York Dordrecht Heidelberg London # Springer Science+Business Media, LLC 2010 All rights reserved. This work may not be translated or copied in whole or in part without the written permission of the publisher (Springer Science+Business Media, LLC, 233 Spring Street, New York, NY 10013, USA), except for brief excerpts in connection with reviews or scholarly analysis. Use in connection with any form of information storage and retrieval, electronic adaptation, computer software, or by similar or dissimilar methodology now known or hereafter developed is forbidden. The use in this publication of trade names, trademarks, service marks, and similar terms, even if they are not identified as such, is not to be taken as an expression of opinion as to whether or not they are subject to proprietary rights. Printed on acid-free paper Springer is part of Springer ScienceþBusiness Media (www.springer.com) Contents 1 Introduction............................................................... 1 Thomas D. Rossing 2 Plucked Strings ........................................................... 11 Thomas D. Rossing 3 Guitars and Lutes ........................................................ 19 Thomas D. Rossing and Graham Caldersmith 4 Portuguese Guitar ........................................................ 47 Octavio Inacio 5 Banjo ...................................................................... 59 James Rae 6 Mandolin Family Instruments........................................... 77 David J. Cohen and Thomas D. Rossing 7 Psalteries and Zithers .................................................... 99 Andres Peekna and Thomas D. -
Resonance and Resonators
Dept of Speech, Music and Hearing ACOUSTICS FOR VIOLIN AND GUITAR MAKERS Erik Jansson Chapter II: Resonance and Resonators Fourth edition 2002 http://www.speech.kth.se/music/acviguit4/part2.pdf Index of chapters Preface/Chapter I Sound and hearing Chapter II Resonance and resonators Chapter III Sound and the room Chapter IV Properties of the violin and guitar string Chapter V Vibration properties of the wood and tuning of violin plates Chapter VI The function, tone, and tonal quality of the guitar Chapter VII The function of the violin Chapter VIII The tone and tonal quality of the violin Chapter IX Sound examples and simple experimental material – under preparation Webpage: http://www.speech.kth.se/music/acviguit4/index.html ACOUSTICS FOR VIOLIN AND GUITAR MAKERS Chapter 2 – Fundamentals of Acoustics RESONANCE AND RESONATORS Part 1: RESONANCE 2.1. Resonance 2.2. Vibration sensitivity 2.3. The mechanical and acoustical measures of the resonator 2.4. Summary 2.5. Key words Part 2: RESONATORS 2.6. The hole-volume resonator 2.7. Complex resonators 2.8. Mesurements of resonances in bars, plates and shells 2.9. Summary 2.10. Key words Jansson: Acoustics for violin and guitar makers 2.2 Chapter 2. FUNDAMENTALS OF ACOUSTICS - RESONANCE AND RESONATORS First part: RESONANCE INTRODUCTION In chapter 1, I presented the fundamental properties of sound and how these properties can be measured. Fundamental hearing sensations were connected to measurable sound properties. In this, the second chapter the concept of RESONANCE and of RESONATORS will be introduced. Resonators are fundamental building blocks of the sound generating systems such as the violin and the guitar. -

Introduction to Audio Acoustics, Speakers and Audio Terminology
White paper Introduction to audio Acoustics, speakers and audio terminology OCTOBER 2017 Table of contents 1. Introduction 3 2. Audio frequency 3 2.1 Audible frequencies 3 2.2 Sampling frequency 3 2.3 Frequency and wavelength 3 3. Acoustics and room dimensions 4 3.1 Echoes 4 3.2 The impact of room dimensions 4 3.3 Professional solutions for neutral room acoustics 4 4. Measures of sound 5 4.1 Human sound perception and phon 5 4.2 Watts 6 4.3 Decibels 6 4.4 Sound pressure level 7 5. Dynamic range, compression and loudness 7 6. Speakers 8 6.1 Polar response 8 6.2 Speaker sensitivity 9 6.3 Speaker types 9 6.3.1 The hi-fi speaker 9 6.3.2 The horn speaker 9 6.3.3 The background music speaker 10 6.4 Placement of speakers 10 6.4.1 The cluster placement 10 6.4.2 The wall placement 11 6.4.3 The ceiling placement 11 6.5 AXIS Site Designer 11 1. Introduction The audio quality that we can experience in a certain room is affected by a number of things, for example, the signal processing done on the audio, the quality of the speaker and its components, and the placement of the speaker. The properties of the room itself, such as reflection, absorption and diffusion, are also central. If you have ever been to a concert hall, you might have noticed that the ceiling and the walls had been adapted to optimize the audio experience. This document provides an overview of basic audio terminology and of the properties that affect the audio quality in a room. -

Extracting Vibration Characteristics and Performing Sound Synthesis of Acoustic Guitar to Analyze Inharmonicity
Open Journal of Acoustics, 2020, 10, 41-50 https://www.scirp.org/journal/oja ISSN Online: 2162-5794 ISSN Print: 2162-5786 Extracting Vibration Characteristics and Performing Sound Synthesis of Acoustic Guitar to Analyze Inharmonicity Johnson Clinton1, Kiran P. Wani2 1M Tech (Auto. Eng.), VIT-ARAI Academy, Bangalore, India 2ARAI Academy, Pune, India How to cite this paper: Clinton, J. and Abstract Wani, K.P. (2020) Extracting Vibration Characteristics and Performing Sound The produced sound quality of guitar primarily depends on vibrational char- Synthesis of Acoustic Guitar to Analyze acteristics of the resonance box. Also, the tonal quality is influenced by the Inharmonicity. Open Journal of Acoustics, correct combination of tempo along with pitch, harmony, and melody in or- 10, 41-50. https://doi.org/10.4236/oja.2020.103003 der to find music pleasurable. In this study, the resonance frequencies of the modelled resonance box have been analysed. The free-free modal analysis was Received: July 30, 2020 performed in ABAQUS to obtain the modes shapes of the un-constrained Accepted: September 27, 2020 Published: September 30, 2020 sound box. To find music pleasing to the ear, the right pitch must be set, which is achieved by tuning the guitar strings. In order to analyse the sound Copyright © 2020 by author(s) and elements, the Fourier analysis method was chosen and implemented in Scientific Research Publishing Inc. MATLAB. Identification of fundamentals and overtones of the individual This work is licensed under the Creative Commons Attribution International string sounds were carried out prior and after tuning the string. The untuned License (CC BY 4.0). -

An Exploration of Monophonic Instrument Classification Using Multi-Threaded Artificial Neural Networks
University of Tennessee, Knoxville TRACE: Tennessee Research and Creative Exchange Masters Theses Graduate School 12-2009 An Exploration of Monophonic Instrument Classification Using Multi-Threaded Artificial Neural Networks Marc Joseph Rubin University of Tennessee - Knoxville Follow this and additional works at: https://trace.tennessee.edu/utk_gradthes Part of the Computer Sciences Commons Recommended Citation Rubin, Marc Joseph, "An Exploration of Monophonic Instrument Classification Using Multi-Threaded Artificial Neural Networks. " Master's Thesis, University of Tennessee, 2009. https://trace.tennessee.edu/utk_gradthes/555 This Thesis is brought to you for free and open access by the Graduate School at TRACE: Tennessee Research and Creative Exchange. It has been accepted for inclusion in Masters Theses by an authorized administrator of TRACE: Tennessee Research and Creative Exchange. For more information, please contact [email protected]. To the Graduate Council: I am submitting herewith a thesis written by Marc Joseph Rubin entitled "An Exploration of Monophonic Instrument Classification Using Multi-Threaded Artificial Neural Networks." I have examined the final electronic copy of this thesis for form and content and recommend that it be accepted in partial fulfillment of the equirr ements for the degree of Master of Science, with a major in Computer Science. Jens Gregor, Major Professor We have read this thesis and recommend its acceptance: James Plank, Bruce MacLennan Accepted for the Council: Carolyn R. Hodges Vice Provost and Dean of the Graduate School (Original signatures are on file with official studentecor r ds.) To the Graduate Council: I am submitting herewith a thesis written by Marc Joseph Rubin entitled “An Exploration of Monophonic Instrument Classification Using Multi-Threaded Artificial Neural Networks.” I have examined the final electronic copy of this thesis for form and content and recommend that it be accepted in partial fulfillment of the requirements for the degree of Master of Science, with a major in Computer Science. -

The Musical Kinetic Shape: a Variable Tension String Instrument
The Musical Kinetic Shape: AVariableTensionStringInstrument Ismet Handˇzi´c, Kyle B. Reed University of South Florida, Department of Mechanical Engineering, Tampa, Florida Abstract In this article we present a novel variable tension string instrument which relies on a kinetic shape to actively alter the tension of a fixed length taut string. We derived a mathematical model that relates the two-dimensional kinetic shape equation to the string’s physical and dynamic parameters. With this model we designed and constructed an automated instrument that is able to play frequencies within predicted and recognizable frequencies. This prototype instrument is also able to play programmed melodies. Keywords: musical instrument, variable tension, kinetic shape, string vibration 1. Introduction It is possible to vary the fundamental natural oscillation frequency of a taut and uniform string by either changing the string’s length, linear density, or tension. Most string musical instruments produce di↵erent tones by either altering string length (fretting) or playing preset and di↵erent string gages and string tensions. Although tension can be used to adjust the frequency of a string, it is typically only used in this way for fine tuning the preset tension needed to generate a specific note frequency. In this article, we present a novel string instrument concept that is able to continuously change the fundamental oscillation frequency of a plucked (or bowed) string by altering string tension in a controlled and predicted Email addresses: [email protected] (Ismet Handˇzi´c), [email protected] (Kyle B. Reed) URL: http://reedlab.eng.usf.edu/ () Preprint submitted to Applied Acoustics April 19, 2014 Figure 1: The musical kinetic shape variable tension string instrument prototype. -

Musical Acoustics - Wikipedia, the Free Encyclopedia 11/07/13 17:28 Musical Acoustics from Wikipedia, the Free Encyclopedia
Musical acoustics - Wikipedia, the free encyclopedia 11/07/13 17:28 Musical acoustics From Wikipedia, the free encyclopedia Musical acoustics or music acoustics is the branch of acoustics concerned with researching and describing the physics of music – how sounds employed as music work. Examples of areas of study are the function of musical instruments, the human voice (the physics of speech and singing), computer analysis of melody, and in the clinical use of music in music therapy. Contents 1 Methods and fields of study 2 Physical aspects 3 Subjective aspects 4 Pitch ranges of musical instruments 5 Harmonics, partials, and overtones 6 Harmonics and non-linearities 7 Harmony 8 Scales 9 See also 10 External links Methods and fields of study Frequency range of music Frequency analysis Computer analysis of musical structure Synthesis of musical sounds Music cognition, based on physics (also known as psychoacoustics) Physical aspects Whenever two different pitches are played at the same time, their sound waves interact with each other – the highs and lows in the air pressure reinforce each other to produce a different sound wave. As a result, any given sound wave which is more complicated than a sine wave can be modelled by many different sine waves of the appropriate frequencies and amplitudes (a frequency spectrum). In humans the hearing apparatus (composed of the ears and brain) can usually isolate these tones and hear them distinctly. When two or more tones are played at once, a variation of air pressure at the ear "contains" the pitches of each, and the ear and/or brain isolate and decode them into distinct tones. -
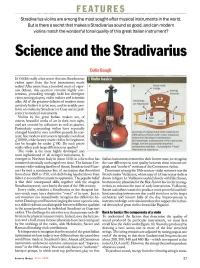
Science and the Stradivarius
FEATURES Stradivarius violins are among the most sought-after musical instruments in the world. But is there a secret that makes a Stradivarius sound so good, and can modern violins match the wonderful tonal quality of this great Italian instrument? Science and the Stradivarius Colin Gough IS TH ERE really a lost secret that sets Stradivarius 1 violin basics violins apart from the best instruments made today? After more than a hundred years of vigor- force rocks bridge ous debate, this question remains highly con- bowing tentious, provoking strongly held but divergent direction views among players, violin makers and scientists alike. All of the greatest violinists of modern times certainly believe it to be true, and invariably per- form on violins by Stradivari or Guarneri in pref- erence to modern instruments. Violins by the great Italian makers are, of course, beautiful works of art in their own right, and are coveted by collectors as well as players. Particularly outstanding violins have reputedly changed hands for over a million pounds. In con- (a) A copy of a Guarnerius violin made by the trast, fine modern instruments typically cost about 19th-century French violin maker Vuillaume, shown from the player's perspective. £ 10 000, while factory-made violins for beginners (b) A schematic cross-section of the violin at the can be bought for under £100. Do such prices bridge, with the acoustically important really reflect such large differences in quality? components labelled - including the "f-hole" The violin is the most highly developed and Helmholtz air resonance. most sophisticated of all stringed instruments. -

Quality of Piano Tones
THE JOURNAL OF THE ACOUSTICAL SOCIETY OF AMERICA Volume 34 Number 6 JUNE. 1962 Quality of Piano Tones HARVEY FLETCIIER,E. DONNEL• BLACKHAM,AND RICIIARD STRATTON Brigham Young University, Provo, Utah (ReceivedNovember 27, 1961) A synthesizerwas constructedto producesimultaneously 100 pure toneswith meansfor controllingthe intensity and frequencyof each one of them. The piano toneswere analyzedby conventionalapparatus and methodsand the analysisset into the synthesizer.The analysiswas consideredcorrect only when a jury of eight listenerscould not tell which were real and which were synthetictones. Various kinds of synthetictones were presented to the jury for comparisonwith real tones.A numberof thesewere judged to have better quality than the real tones.According to thesetests synthesized piano-like tones were produced when the attack time was lessthan 0.01 sec.The decaycan be as long as 20 secfor the lower notes and be lessthan 1 secfor the very high ones.The best quality is producedwhen the partials decreasein level at the rate of 2 db per 100-cpsincrease in the frequencyof the partial. The partialsbelow middle C must be inharmonicin frequencyto be piano-like. INTRODUCTION synthesizer,and (4) the frequencychanger. To these HISpaper isa reportof our efforts tofind an ob- facilitieshave been added, a sonograph,an analyzer, a jectivedescription of the qualityof pianotones as single-tracktape recorder,a 5-track tape recorder,and understoodby musicians,and also to try to find syn- other apparatususually available in electronicresearch thetic toneswhich are consideredby them to be better laboratories.A block diagram of the arrangementis than real-piano tones. shownin Fig. 1. The usual statement found in text books is that the pitch of a tone is determinedby the frequencyof EQUIPMENT vibration,the loudnessby the intensityof the vibration, 1. -

A Pocket-Sized Introduction to Acoustics Keith Attenborough, Michiel Postema
A pocket-sized introduction to acoustics Keith Attenborough, Michiel Postema To cite this version: Keith Attenborough, Michiel Postema. A pocket-sized introduction to acoustics. The Univerisity of Hull, 80 p., 2008, 978-90-812588-2-1. hal-03188302 HAL Id: hal-03188302 https://hal.archives-ouvertes.fr/hal-03188302 Submitted on 6 Apr 2021 HAL is a multi-disciplinary open access L’archive ouverte pluridisciplinaire HAL, est archive for the deposit and dissemination of sci- destinée au dépôt et à la diffusion de documents entific research documents, whether they are pub- scientifiques de niveau recherche, publiés ou non, lished or not. The documents may come from émanant des établissements d’enseignement et de teaching and research institutions in France or recherche français ou étrangers, des laboratoires abroad, or from public or private research centers. publics ou privés. A pocket-sized introduction to acoustics Prof. Dr. Keith Attenborough Dr. Michiel Postema Department of Engineering The University of Hull 2 ISBN 978-90-812588-2-1 °c 2008 K. Attenborough, M. Postema. All rights reserved. No part of this publication may be reproduced, stored in a retrieval system or transmitted in any form or by any means, electronic, mechan- ical, photocopying, recording or otherwise, without the prior written permission of the authors. Publisher: Michiel Postema, Bergschenhoek Printed in England by The University of Hull Typesetting system: LATEX 2" Contents 1 Acoustics and ultrasonics 5 2 Mass on a spring 7 3 Wave equation in fluid 9 4 Sound speed