Gins: the Cnes/Grgs Gnss Scientific Software
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

COPERNICUS MARITIME SURVEILLANCE SERVICE OVERVIEW Copernicus Maritime Surveillance Service
European Maritime Safety Agency COPERNICUS MARITIME SURVEILLANCE SERVICE OVERVIEW Copernicus Maritime Surveillance Service THE COPERNICUS PROGRAMME Copernicus is a European Union Programme aimed at developing European information services based on satellite Earth Observation and in situ (non-space) data analyses. The programme is managed by the European Commission, and implemented in partnership with the member states and other organisations, including the European Maritime Safety Agency (EMSA). Copernicus is served by a set of dedicated satellites (the Sentinels) and contributing missions (existing commercial and public satellites). Copernicus services address six main thematic areas: Security; Land Monitoring; Marine Monitoring; Atmosphere Monitoring; Emergency Management; and Climate Change. THE SECURITY SERVICE The Copernicus Security Service supports EU policy by providing information in response to Europe’s security challenges. It improves crisis prevention, preparedness and response in three key areas: maritime surveillance (implemented by EMSA) border surveillance support to EU External Action The Copernicus service for security applications is distinct from other services in the Copernicus programme. Data obtained directly through the Copernicus programme is combined with data from other sources, which may be sensitive or restricted. The end services are then provided directly to authorised national administrations and to a limited number of EU institutions and bodies, in accordance with their access rights. European Maritime Safety Agency THE COPERNICUS MARITIME SURVEILLANCE SERVICE The Copernicus Maritime Surveillance Service supports improved monitoring of activities at sea. The goal of the Copernicus Maritime Surveillance Service, implemented by EMSA, is to support its users by providing a better understanding and improved monitoring of activities at sea that have an impact on areas such as: fisheries control maritime safety and security law enforcement marine environment (pollution monitoring) support to international organisations. -

CNES Miniaturization Policy: an Answer to Nanosatellites Challenges
SSC19-I-02 CNES miniaturization policy: an answer to Nanosatellites challenges C. Dudal, C. Laporte, T. Floriant, P. Lafabrie CNES 18, avenue Edouard Belin 31401 Toulouse Cedex 9, France; +33561283070 [email protected] ABSTRACT The reduction of mass and size with improvement of the performance of a device is a permanent challenge for the space industry. The French National Space Agency has funded hundreds of R&D activities in the past, in all dedicated technical areas to facilitate these kind of technological evolution. Miniaturization efforts have, more recently, encountered a growing field of application, the one of Nanosatellites. For these applications, performance/cost trade-off is largely dominated by full cost, that is to say the cost including the entire satellite system development, from the initial idea to the end of life, including operations, data processing and its distribution. The carried out trade-offs are therefore based on a different constraints environment, in which the risk variable is systematically re-evaluated considering the cost/performance couple; the methods, the development process and the planning of delivery being directly impacted by this challenge. In this logic, and while continuing its efforts to miniaturize and improve performance for conventional markets (Earth observation, science, telecommunications, ...), CNES has adapted its working environment around the Nanosats domain to accelerate the development of adapted solutions. This adaptation being made both in terms of new development processes and of use of new COTS technology for equipment themselves. Moreover, projects in New Space are changing the historical relationship between CNES and its industrial partners and are encouraging a transition from a client/provider approach to a more co-partners approach. -

Global Exploration Roadmap
The Global Exploration Roadmap January 2018 What is New in The Global Exploration Roadmap? This new edition of the Global Exploration robotic space exploration. Refinements in important role in sustainable human space Roadmap reaffirms the interest of 14 space this edition include: exploration. Initially, it supports human and agencies to expand human presence into the robotic lunar exploration in a manner which Solar System, with the surface of Mars as • A summary of the benefits stemming from creates opportunities for multiple sectors to a common driving goal. It reflects a coordi- space exploration. Numerous benefits will advance key goals. nated international effort to prepare for space come from this exciting endeavour. It is • The recognition of the growing private exploration missions beginning with the Inter- important that mission objectives reflect this sector interest in space exploration. national Space Station (ISS) and continuing priority when planning exploration missions. Interest from the private sector is already to the lunar vicinity, the lunar surface, then • The important role of science and knowl- transforming the future of low Earth orbit, on to Mars. The expanded group of agencies edge gain. Open interaction with the creating new opportunities as space agen- demonstrates the growing interest in space international science community helped cies look to expand human presence into exploration and the importance of coopera- identify specific scientific opportunities the Solar System. Growing capability and tion to realise individual and common goals created by the presence of humans and interest from the private sector indicate and objectives. their infrastructure as they explore the Solar a future for collaboration not only among System. -

European Space Agency and CNES Endorse Expansion of Kayrros Methane Detection Technology with New €2.4 Million Contract
European Space Agency and CNES endorse expansion of Kayrros methane detection technology with new €2.4 million contract New funding from ESA Space Solutions – with support from the Centre National d’Études Spatiales – extends geographical coverage, adds data sources and boosts field operations. Paris, 31 March 2021 — Kayrros, the leading advanced data analytics company focused on satellite imagery and alternative data for more-timely decision making, announced today that it has received a contract of €2.4 million from the European Space Agency (ESA), an initiative supported by the Centre National d’Études Spatiales (CNES). Kayrros and ESA began their collaboration in early 2020 on the basis of Kayrros’ use of Sentinel-5P data, after working closely with CNES on the project since 2019. This contract will supplement Kayrros’ own fundraising to invest in the company’s breakthrough Methane Watch technology, bringing the total investment to €5 million. Methane is the second-largest driver of global warming after carbon dioxide and Kayrros Methane Watch is the first commercially available geospatial technology to detect, measure and attribute methane leaks to their sources worldwide. The technology: - Combines data from different ESA Sentinel satellite sensors within the Copernicus constellation. - Allows energy stakeholders and industry asset owners to take action on methane emissions using near-real time measurements and rapid processing on the world-leading Kayrros global asset observation platform. - Has already revealed dramatic increases in large methane leaks around the world and exposed significantly different regional trends likely due to activity changes, operational practices and infrastructure issues. The contract provided by ESA is for a targeted collaboration between Kayrros and ESA’s Space Solutions’ Business Applications program. -
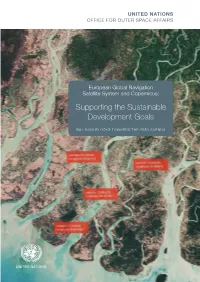
Supporting the Sustainable Development Goals
UNITED NATIONS OFFICE FOR OUTER SPACE AFFAIRS European Global Navigation Satellite System and Copernicus: Supporting the Sustainable Development Goals BUILDING BLOCKS TOWARDS THE 2030 AGENDA UNITED NATIONS Cover photo: ©ESA/ATG medialab. Adapted by the European GNSS Agency, contains modified Copernicus Sentinel data (2017), processed by ESA, CC BY-SA 3.0 IGO OFFICE FOR OUTER SPACE AFFAIRS UNITED NATIONS OFFICE AT VIENNA European Global Navigation Satellite System and Copernicus: Supporting the Sustainable Development Goals BUILDING BLOCKS TOWARDS THE 2030 AGENDA UNITED NATIONS Vienna, 2018 ST/SPACE/71 © United Nations, January 2018. All rights reserved. The designations employed and the presentation of material in this publication do not imply the expression of any opinion whatsoever on the part of the Secretariat of the United Nations concern- ing the legal status of any country, territory, city or area, or of its authorities, or concerning the delimitation of its frontiers or boundaries. Information on uniform resource locators and links to Internet sites contained in the present pub- lication are provided for the convenience of the reader and are correct at the time of issue. The United Nations takes no responsibility for the continued accuracy of that information or for the content of any external website. This publication has not been formally edited. Publishing production: English, Publishing and Library Section, United Nations Office at Vienna. Foreword by the Director of the Office for Outer Space Affairs The 2030 Agenda for Sustainable Development came into effect on 1 January 2016. The Agenda is anchored around 17 Sustainable Development Goals (SDGs), which set the targets to be fulfilled by all governments by 2030. -

Caesar, French Probative Public Service for In-Orbit Collision Avoidance
CAESAR, FRENCH PROBATIVE PUBLIC SERVICE FOR IN-ORBIT COLLISION AVOIDANCE François LAPORTE(1), Monique MOURY(1) (1) CNES DCT/OP/MO, 18 av. Edouard Belin, 31401 Toulouse cedex 9, France, Email : [email protected]; [email protected] ABSTRACT 2 CONJUNCTION ASSESSMENT WITH CSMs This paper starts by describing the conjunction analysis which has to be performed using CSM data provided by Conjunction Summary Messages (CSM) are real JSpOC. This description not only demonstrates that satellite protection provided by JSpOC for all active Collision Avoidance is a 2-step process (close approach satellites. They are made available on Emergency detection followed by risk evaluation for collision Criteria which are Time of Closest Approach (TCA) avoidance decision) but also leads to the conclusion that within 72 hours combined with for Low Earth Orbit there is a need for Middle Man role. (LEO) overall miss distance lower than 1km with radial miss distance lower than 200m and for higher orbits After describing the Middle Man concept, it introduces (GEO and MEO) overall miss distance lower than the French response CAESAR and the need for 10km. CSMs include: identification of the 2 objects, collaborative work environment which is implied by TCA and for each object position, velocity, dispersion Middle Man concept. It includes a description of the and some orbit determination characteristics. environment put in place for CAESAR (secure website Nevertheless, they are advisory and informational and dedicated tools), the content of the service, the messages only and are not directly actionable: they condition for the distribution of the CNES software JAC don’t provide a direct recommendation to perform an and the advantages for subscribers. -
Espinsights the Global Space Activity Monitor
ESPInsights The Global Space Activity Monitor Issue 6 April-June 2020 CONTENTS FOCUS ..................................................................................................................... 6 The Crew Dragon mission to the ISS and the Commercial Crew Program ..................................... 6 SPACE POLICY AND PROGRAMMES .................................................................................... 7 EUROPE ................................................................................................................. 7 COVID-19 and the European space sector ....................................................................... 7 Space technologies for European defence ...................................................................... 7 ESA Earth Observation Missions ................................................................................... 8 Thales Alenia Space among HLS competitors ................................................................... 8 Advancements for the European Service Module ............................................................... 9 Airbus for the Martian Sample Fetch Rover ..................................................................... 9 New appointments in ESA, GSA and Eurospace ................................................................ 10 Italy introduces Platino, regions launch Mirror Copernicus .................................................. 10 DLR new research observatory .................................................................................. -

Assessment of Multiple GNSS Real-Time SSR Products from Different Analysis Centers
International Journal of Geo-Information Article Assessment of Multiple GNSS Real-Time SSR Products from Different Analysis Centers Zhiyu Wang 1,2, Zishen Li 1,*, Liang Wang 1,2,*, Xiaoming Wang 1,3 ID and Hong Yuan 1 1 Academy of Opto-Electronics, Chinese Academy of Sciences, 9 Dengzhuang South Road, Haidian District, Beijing 100094, China; [email protected] (Z.W.); [email protected] (X.W.); [email protected] (H.Y.) 2 University of Chinese Academy of Sciences, 19A Yuquan Road, Shijingshan District, Beijing 100049, China 3 School of Environment and Spatial Informatics, China University of Mining and Technology, 1 Daxue Road, Xuzhou 221116, China * Correspondence: [email protected] (Z.L.); [email protected] (L.W.); Tel.: +86-10-8217-8896 (Z.L. & L.W.) Received: 15 January 2018; Accepted: 7 March 2018; Published: 8 March 2018 Abstract: The real-time State Space Representation (SSR) product of the GNSS (Global Navigation Satellite System) orbit and clock is one of the most essential corrections for real-time precise point positioning (PPP). In this work, the performance of current SSR products from eight analysis centers were assessed by comparing it with the final product and the accuracy of real-time PPP. Numerical results showed that (1) the accuracies of the GPS SSR product were better than 8 cm for the satellite orbit and 0.3 ns for the satellite clock; (2) the accuracies of the GLONASS (GLObalnaya NAvigatsionnaya Sputnikovaya Sistema) SSR product were better than 10 cm for orbit RMS (Root Mean Square) and 0.6 ns for clock STD (Standard Deviation); and (3) the accuracies of the BDS (BeiDou Navigation Satellite System) and Galileo SSR products from CLK93 were about 14.54 and 4.42 cm for the orbit RMS and 0.32 and 0.18 ns for the clock STD, respectively. -
IADC-2020- UN COPUOS STSC Presentation Final
The Inter-Agency Space Debris Coordination Committee (IADC) an overview of IADC’s annual activities Laurent Francillout, CNES, France IADC Chair www.iadc-home.org 57 th Session of the Scientific and Technical Subcommittee United Nations Committee on the Peaceful Uses of Outer Space 3 to 14 February 2020 1 Overview IADC is an international forum of national and international space agencies for the worldwide technical/scientific coordination of activities related to space debris in Earth orbit issues and provides technical recommendations. The 13 IADC member agencies are: – ASI (Agenzia Spaziale Italiana) – CNES (Centre National d'Etudes Spatiales) – CNSA (China National Space Administration) – CSA (Canadian Space Agency) – DLR (German Aerospace Center) – ESA (European Space Agency) – ISRO (Indian Space Research Organisation) – JAXA (Japan Aerospace Exploration Agency) – KARI (Korea Aerospace Research Institute) – NASA (National Aeronautics and Space Administration) – ROSCOSMOS (State Space Corporation “ROSCOSMOS”) – SSAU (State Space Agency of Ukraine) – UKSA (United Kingdom Space Agency) 2 Membership IADC members are national or international space and state organizations that carry out space activities through planning, designing, launching, or operating space objects. IADC members should actively undertake space debris research activities and contribute to an increased understanding of space debris issues for the preservation of the orbital environment (IADC Terms of Reference, see http://www.iadc-home.org ) 3 Structure and Purposes IADC consists of a Steering Group and four specified Working Groups (WGs) covering measurements ( WG1 ), environment and database (WG2 ), protection ( WG3 ), and mitigation ( WG4 ). The primary purpose of the IADC is to – exchange information on space debris research activities between member space agencies. -

Technologies for Exploration
SP-1254 SP-1254 TTechnologiesechnologies forfor ExplorationExploration T echnologies forExploration AuroraAurora ProgrammeProgramme Proposal:Proposal: Annex Annex DD Contact: ESA Publications Division c/o ESTEC, PO Box 299, 2200 AG Noordwijk, The Netherlands Tel. (31) 71 565 3400 - Fax (31) 71 565 5433 SP-1254 November 2001 Technologies for Exploration Aurora Programme Proposal: Annex D This report was written by the staff of ESA’s Directorate of Technical and Operational Support. Published by: ESA Publications Division ESTEC, PO Box 299 2200 AG Noordwijk The Netherlands Editor/layout: Andrew Wilson Copyright: © 2001 European Space Agency ISBN: 92-9092-616-3 ISSN: 0379-6566 Printed in: The Netherlands Price: €30 / 70 DFl technologies for exploration Technologies for Exploration Contents 1 Introduction 3 2 Exploration Milestones 3 3 Explorations Missions 3 4Technology Development and Associated Cost 5 5 Conclusion 6 Annex 1: Automated Guidance, Navigation & Control A1.1 and Mission Analysis Annex 2: Micro-Avionics A2.1 Annex 3: Data Processing and Communication Technologies A3.1 Annex 4: Entry, Descent and Landing A4.1 Annex 5: Crew Aspects of Exploration A5.1 Annex 6: In Situ Resource Utilisation A6.1 Annex 7: Power A7.1 Annex 8: Propulsion A8.1 Annex 9: Robotics and Mechanisms A9.1 Annex 10: Structures, Materials and Thermal Control A10.1 1 Table 1. Exploration Milestones for the Definition of Technology Readiness Requirements. 2005-2010 In situ resource utilisation/life support (ground demonstration) Decision on development of alternative -

Galileo Millimeter-Level Kinematic Precise Point Positioning With
Katsigianni et al. Earth, Planets and Space (2019) 71:76 https://doi.org/10.1186/s40623-019-1055-1 EXPRESS LETTER Open Access Galileo millimeter-level kinematic precise point positioning with ambiguity resolution Georgia Katsigianni1,2* , Felix Perosanz1, Sylvain Loyer2 and Mini Gupta3 Abstract On February 11, 2019, four additional Galileo satellites were put into service, approaching the completion of the Euro- pean global navigation satellite system constellation. For the frst time, the performance of Galileo system in terms of high-accuracy precise point positioning (PPP) can be evaluated. The results presented in this paper are based on one full week (February 11–17, 2019) of post-processed kinematic positioning for a set of fxed stations at a 30-s sampling. Due to the availability of precise Galileo orbit and “integer” clock products, delivered by CNES/CLS Analysis Center of International GNSS Service, the impact of Galileo ambiguity resolution on the positioning results is also quantifed. The precision using Galileo-only measurements in the East, North and Up directions is 10 mm, 7 mm and 33 mm for PPP and 6 mm, 5 mm and 28 mm for PPP-AR (PPP with ambiguity resolution) (1 sigma), respectively. These results shall represent the future performance of the Galileo system for kinematic post-positioning. They also indicate the important future contribution of Galileo to high-accuracy multi-GNSS applications. Keywords: Galileo, Precise point positioning, Ambiguity resolution, Integer precise point positioning, Kinematic, Post-processing Introduction segment consisted of 22 usable satellites (8 in plane A, 7 in Te International GNSS Service (IGS) gives an open plane B and 7 in plane C) and 2 satellites in elliptical orbits access to the highest quality of GPS and GLONASS that drift relatively to the 3 nominal planes (GSA 2019). -
CFE Final Report, 09 05
CentreÿFrançaisÿsurÿlesÿEtats-Unisÿ(CFE) EUROPEANSÿINÿSPACE THEÿINTERACTIONSÿBETWEENÿTHEÿCONDUCTÿOFÿSPACEÿPROGRAMMES ANDÿTHEÿEUROPEANÿPROCESS SEPTEMBREÿ2005 [email protected]; [email protected] ExecutiveÿSummary Decisive choices for the future of European space exploration programmes will be made during the next meetings of the ESA ministerial council, in December 2005 and in 2008. The continuation of the Aurora programme, as well as cooperation ventures with the U.S. and Russia will be decided on, setting the stage for the next 5 to 25 years. The Automated Transfer Vehicle, human space flight, robotic missions to Mars and niche technologies are amongst the elements of the overall programme that will be defined. Budgets constraints, however, will be a limiting factor in the decision process. They point to the lack of political support for space exploration in Europe. Contrary to the U.S., manned exploration does not enjoy strong historical and cultural references in Europe. Moreover, past partnerships with NASA do not encourage new cooperative ventures. The two main drivers for space exploration in Europe are rather the preservation of high-tech industry and jobs, as well as the continuation of a successful European scientific presence. If an ambitious European space exploration programme is to be funded, a lobbying campaign targeting European decision-makers should be undertaken on the basis of these drivers. Space exploration remains a responsibility of ESA. The involvement of the EU would be a political and budgetary bonus for space exploration. This poses in fine the question of the evolving relationship between the two entities. 2 Introduction During its next Ministerial Meetings, in December 05 and in 2008, the European Space Agency (ESA) is expected to adopt its programme for the next seven years.