Rossby and Kelvin Waves
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
An Application of Kelvin Wave Expansion to Model Flow Pattern Using in Oil Spill Simulation M
Brigham Young University BYU ScholarsArchive 6th International Congress on Environmental International Congress on Environmental Modelling and Software - Leipzig, Germany - July Modelling and Software 2012 Jul 1st, 12:00 AM An Application of Kelvin Wave Expansion to Model Flow Pattern Using in Oil Spill Simulation M. A. Badri Follow this and additional works at: https://scholarsarchive.byu.edu/iemssconference Badri, M. A., "An Application of Kelvin Wave Expansion to Model Flow Pattern Using in Oil Spill Simulation" (2012). International Congress on Environmental Modelling and Software. 323. https://scholarsarchive.byu.edu/iemssconference/2012/Stream-B/323 This Event is brought to you for free and open access by the Civil and Environmental Engineering at BYU ScholarsArchive. It has been accepted for inclusion in International Congress on Environmental Modelling and Software by an authorized administrator of BYU ScholarsArchive. For more information, please contact [email protected], [email protected]. International Environmental Modelling and Software Society (iEMSs) 2012 International Congress on Environmental Modelling and Software Managing Resources of a Limited Planet, Sixth Biennial Meeting, Leipzig, Germany R. Seppelt, A.A. Voinov, S. Lange, D. Bankamp (Eds.) http://www.iemss.org/society/index.php/iemss-2012-proceedings ١ ٢ ٣ ٤ An Application of Kelvin Wave Expansion ٥ to Model Flow Pattern Using in Oil Spill ٦ Simulation ٧ ٨ 1 M.A. Badri ٩ Subsea R&D center, P.O.Box 134, Isfahan University of Technology, Isfahan, Iran ١٠ [email protected] ١١ ١٢ ١٣ Abstract: In this paper, data of tidal constituents from co-tidal charts are invoked to ١٤ determine water surface level and velocity. -

Kelvin/Rossby Wave Partition of Madden-Julian Oscillation Circulations
climate Article Kelvin/Rossby Wave Partition of Madden-Julian Oscillation Circulations Patrick Haertel Department of Earth and Planetary Sciences, Yale University, New Haven, CT 06511, USA; [email protected] Abstract: The Madden Julian Oscillation (MJO) is a large-scale convective and circulation system that propagates slowly eastward over the equatorial Indian and Western Pacific Oceans. Multiple, conflicting theories describe its growth and propagation, most involving equatorial Kelvin and/or Rossby waves. This study partitions MJO circulations into Kelvin and Rossby wave components for three sets of data: (1) a modeled linear response to an MJO-like heating; (2) a composite MJO based on atmospheric sounding data; and (3) a composite MJO based on data from a Lagrangian atmospheric model. The first dataset has a simple dynamical interpretation, the second provides a realistic view of MJO circulations, and the third occurs in a laboratory supporting controlled experiments. In all three of the datasets, the propagation of Kelvin waves is similar, suggesting that the dynamics of Kelvin wave circulations in the MJO can be captured by a system of equations linearized about a basic state of rest. In contrast, the Rossby wave component of the observed MJO’s circulation differs substantially from that in our linear model, with Rossby gyres moving eastward along with the heating and migrating poleward relative to their linear counterparts. These results support the use of a system of equations linearized about a basic state of rest for the Kelvin wave component of MJO circulation, but they question its use for the Rossby wave component. Keywords: Madden Julian Oscillation; equatorial Rossby wave; equatorial Kelvin wave Citation: Haertel, P. -

Baroclinic Instability, Lecture 19
19. Baroclinic Instability In two-dimensional barotropic flow, there is an exact relationship between mass 2 streamfunction ψ and the conserved quantity, vorticity (η)given by η = ∇ ψ.The evolution of the conserved variable η in turn depends only on the spatial distribution of η andonthe flow, whichisd erivable fromψ and thus, by inverting the elliptic relation, from η itself. This strongly constrains the flow evolution and allows one to think about the flow by following η around and inverting its distribution to get the flow. In three-dimensional flow, the vorticity is a vector and is not in general con served. The appropriate conserved variable is the potential vorticity, but this is not in general invertible to find the flow, unless other constraints are provided. One such constraint is geostrophy, and a simple starting point is the set of quasi-geostrophic equations which yield the conserved and invertible quantity qp, the pseudo-potential vorticity. The same dynamical processes that yield stable and unstable Rossby waves in two-dimensional flow are responsible for waves and instability in three-dimensional baroclinic flow, though unlike the barotropic 2-D case, the three-dimensional dy namics depends on at least an approximate balance between the mass and flow fields. 97 Figure 19.1 a. The Eady model Perhaps the simplest example of an instability arising from the interaction of Rossby waves in a baroclinic flow is provided by the Eady Model, named after the British mathematician Eric Eady, who published his results in 1949. The equilibrium flow in Eady’s idealization is illustrated in Figure 19.1. -

ATMS 310 Rossby Waves Properties of Waves in the Atmosphere Waves
ATMS 310 Rossby Waves Properties of Waves in the Atmosphere Waves – Oscillations in field variables that propagate in space and time. There are several aspects of waves that we can use to characterize their nature: 1) Period – The amount of time it takes to complete one oscillation of the wave\ 2) Wavelength (λ) – Distance between two peaks of troughs 3) Amplitude – The distance between the peak and the trough of the wave 4) Phase – Where the wave is in a cycle of amplitude change For a 1-D wave moving in the x-direction, the phase is defined by: φ ),( = −υtkxtx − α (1) 2π where φ is the phase, k is the wave number = , υ = frequency of oscillation (s-1), and λ α = constant determined by the initial conditions. If the observer is moving at the phase υ speed of the wave ( c ≡ ), then the phase of the wave is constant. k For simplification purposes, we will only deal with linear sinusoidal wave motions. Dispersive vs. Non-dispersive Waves When describing the velocity of waves, a distinction must be made between the group velocity and the phase speed. The group velocity is the velocity at which the observable disturbance (energy of the wave) moves with time. The phase speed of the wave (as given above) is how fast the constant phase portion of the wave moves. A dispersive wave is one in which the pattern of the wave changes with time. In dispersive waves, the group velocity is usually different than the phase speed. A non- dispersive wave is one in which the patterns of the wave do not change with time as the wave propagates (“rigid” wave). -
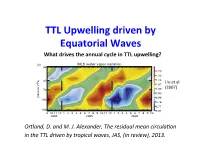
TTL Upwelling Driven by Equatorial Waves
TTL Upwelling driven by Equatorial Waves L09804 LIUWhat drives the annual cycle in TTL upwelling? ET AL.: START OF WATER VAPOR AND CO TAPE RECORDERS L09804 Liu et al. (2007) Ortland, D. and M. J. Alexander, The residual mean circula8on in the TTL driven by tropical waves, JAS, (in review), 2013. Figure 1. (a) Seasonal variation of 10°N–10°S mean EOS MLS water vapor after dividing by the mean value at each level. (b) Seasonal variation of 10°N–10°S EOS MLS CO after dividing by the mean value at each level. represented in two principal ways. The first is by the area of [8]ConcentrationsofwatervaporandCOnearthe clouds with low infrared brightness temperatures [Gettelman tropical tropopause are available from retrievals of EOS et al.,2002;Massie et al.,2002;Liu et al.,2007].Thesecond MLS measurements [Livesey et al.,2005,2006].Monthly is by the area of radar echoes reaching the tropopause mean water vapor and CO mixing ratios at 146 hPa and [Alcala and Dessler,2002;Liu and Zipser, 2005]. In this 100 hPa in the 10°N–10°Sand10° longitude boxes are study, we examine the areas of clouds that have TRMM calculated from one full year (2005) of version 1.5 MLS Visible and Infrared Scanner (VIRS) 10.8 mmbrightness retrievals. In this work, all MLS data are processed with temperatures colder than 210 K, and the area of 20 dBZ requirements described by Livesey et al. [2005]. Tropopause echoes at 14 km measured by the TRMM Precipitation temperature is averaged from the 2.5° resolution NCEP Radar (PR). -

ATOC 5051: Introduction to Physical Oceanography HW #4: Given Oct
ATOC 5051: Introduction to Physical Oceanography HW #4: Given Oct. 21; Due Oct 30 1. [15pts] Figure 1 shows the longitude - time plot of the Depth of 20°C isotherm Anomaly (D20A) along the Pacific equator from Jan 2004-Jan 2005. D20 represents the depth of the central thermocline in the equatorial Pacific, which deepens by as much as 30m in January 2004 and to a lesser degree, Jan 2005. Note that positive D20A represents thermocline ! deepening and negative D20A, thermocline shoaling. D20 anomaly (m) (a) From Figure 1, estimate the wave period and propagation speed, and calculate the wavelength. Provide discussions on how you obtain these estimates. (6pts) The period of the wave, which is the time it spans the two phase lines, is T=~80days. Take 1°~110km. The time it takes the wave to cross the basin, with Width=100°=100x110000m=11x106m, is ~50days. Therefore, cp=Width/(50*86400)=2.5(m/s). Based on the definition, wavelength 170E 90W L=T*cp=80*86400*2.5=17280(km). (b) From Figure 1, can you infer whether they are Figure 1. D20A along the equatorial symmetric or anti-symmetric waves, why? (3pts) Pacific from Jan 2004-Jan 2005. From Fig. 1, I infer that they’re symmetric waves Units are meters (m). The two solid because D20A, which mirrors sea level anomaly, lines represent the phase lines of obtains large amplitude on the equator. For anti- two waves, which also represent the symmetric waves, D20 and sea level are ~0 at the propagating fronts of deepened equator. -

Leaky Slope Waves and Sea Level: Unusual Consequences of the Beta Effect Along Western Boundaries with Bottom Topography and Dissipation
JANUARY 2020 W I S E E T A L . 217 Leaky Slope Waves and Sea Level: Unusual Consequences of the Beta Effect along Western Boundaries with Bottom Topography and Dissipation ANTHONY WISE National Oceanography Centre, and Department of Earth, Ocean and Ecological Sciences, University of Liverpool, Liverpool, United Kingdom CHRIS W. HUGHES Department of Earth, Ocean and Ecological Sciences, University of Liverpool, and National Oceanography Centre, Liverpool, United Kingdom JEFF A. POLTON AND JOHN M. HUTHNANCE National Oceanography Centre, Liverpool, United Kingdom (Manuscript received 5 April 2019, in final form 29 October 2019) ABSTRACT Coastal trapped waves (CTWs) carry the ocean’s response to changes in forcing along boundaries and are important mechanisms in the context of coastal sea level and the meridional overturning circulation. Motivated by the western boundary response to high-latitude and open-ocean variability, we use a linear, barotropic model to investigate how the latitude dependence of the Coriolis parameter (b effect), bottom topography, and bottom friction modify the evolution of western boundary CTWs and sea level. For annual and longer period waves, the boundary response is characterized by modified shelf waves and a new class of leaky slope waves that propagate alongshore, typically at an order slower than shelf waves, and radiate short Rossby waves into the interior. Energy is not only transmitted equatorward along the slope, but also eastward into the interior, leading to the dissipation of energy locally and offshore. The b effectandfrictionresultinshelfandslope waves that decay alongshore in the direction of the equator, decreasing the extent to which high-latitude variability affects lower latitudes and increasing the penetration of open-ocean variability onto the shelf—narrower conti- nental shelves and larger friction coefficients increase this penetration. -

The Counter-Propagating Rossby-Wave Perspective on Baroclinic Instability
Q. J. R. Meteorol. Soc. (2005), 131, pp. 1393–1424 doi: 10.1256/qj.04.22 The counter-propagating Rossby-wave perspective on baroclinic instability. Part III: Primitive-equation disturbances on the sphere 1∗ 2 1 3 CORE By J. METHVEN , E. HEIFETZ , B. J. HOSKINS and C. H. BISHOPMetadata, citation and similar papers at core.ac.uk 1 Provided by Central Archive at the University of Reading University of Reading, UK 2Tel-Aviv University, Israel 3Naval Research Laboratories/UCAR, Monterey, USA (Received 16 February 2004; revised 28 September 2004) SUMMARY Baroclinic instability of perturbations described by the linearized primitive equations, growing on steady zonal jets on the sphere, can be understood in terms of the interaction of pairs of counter-propagating Rossby waves (CRWs). The CRWs can be viewed as the basic components of the dynamical system where the Hamil- tonian is the pseudoenergy and each CRW has a zonal coordinate and pseudomomentum. The theory holds for adiabatic frictionless flow to the extent that truncated forms of pseudomomentum and pseudoenergy are globally conserved. These forms focus attention on Rossby wave activity. Normal mode (NM) dispersion relations for realistic jets are explained in terms of the two CRWs associated with each unstable NM pair. Although derived from the NMs, CRWs have the conceptual advantage that their structure is zonally untilted, and can be anticipated given only the basic state. Moreover, their zonal propagation, phase-locking and mutual interaction can all be understood by ‘PV-thinking’ applied at only two ‘home-bases’— potential vorticity (PV) anomalies at one home-base induce circulation anomalies, both locally and at the other home-base, which in turn can advect the PV gradient and modify PV anomalies there. -

MAST602: Introduction to Physical Oceanography (Andreas Münchow) (Closed Book In-Class Rossby Wave Exercise, Oct.-21, 2008)
MAST602: Introduction to Physical Oceanography (Andreas Münchow) (Closed book in-class Rossby Wave Exercise, Oct.-21, 2008) In a series of papers published in the 1930ies Carl-Gustaf Rossby introduced a strange new wave form whose existence has not been confirmed observationally until the late 1990ies. A debate is presently raging if and how these waves may impact ecosystems in the ocean, e.g., “Killworth et al., 2003: Physical and biological mechanisms for planetary waves observed in satellite-derived chlorophyll, J. Geophys. Res.” and “Dandonneau et al., 2003: Oceanic Rossby waves acting as a “Hay Rake” for ecosystem floating by- products, Science” as well as a flurry of comments generated by these papers. These peculiar waves originate from a linear balance between local acceleration, Coriolis acceleration, and pressure gradients as well as continuity of mass, that is, East-west momentum balance: ∂u/∂t – fv = -g ∂η/∂x North-south momentum balance: ∂v/∂t + fu = -g ∂η/∂y Continuity: ∂η/∂t + H (∂u/∂x+∂v/∂y) = 0 where the Coriolis parameter f = 2 Ω sin(latitude) is no longer a constant, but is approximated locally as f ≈ f0 + βy. The rotational rate of the earth is Ω=2π/day and at the -4 -1 -11 -1 -1 latitude of Lewes, DE (39N), f0~0.9×10 s and β~2×10 m s . A number of peculiar properties can be inferred from its dispersion relation: σ = − β κ / (κ2+l2+R-2) where σ is the wave frequency, κ is the wave number in the east-west direction, l is the wave number in the north-south direction, β is a constant (the so-called beta-parameter 1/2 that incorporates Coriolis effects that changes with latitude), and R=(g’H) /f0 is a constant (the so-called Rossby radius of deformation, the same as the lateral decay scale of the Kelvin wave, where g’~9.81×10-3m/s2 is the constant of “reduced” gravity, and H~1000 m is the depth of the pycnocline (density interface). -

Thompson/Ocean 420/Winter 2005 Tide Dynamics 1
Thompson/Ocean 420/Winter 2005 Tide Dynamics 1 Tide Dynamics Dynamic Theory of Tides. In the equilibrium theory of tides, we assumed that the shape of the sea surface was always in equilibrium with the forcing, even though the forcing moves relative to the Earth as the Earth rotates underneath it. From this Earth-centric reference frame, in order for the sea surface to “keep up” with the forcing, the sea level bulges need to move laterally through the ocean. The signal propagates as a surface gravity wave (influenced by rotation) and the speed of that propagation is limited by the shallow water wave speed, C = gH , which at the equator is only about half the speed at which the forcing moves. In other t = 0 words, if the system were in moon equilibrium at a time t = 0, then by the time the Earth had rotated through an angle , the bulge would lag the equilibrium position by an angle /2. Laplace first rearranged the rotating shallow water equations into the system that underlies the tides, now known as the Laplace tidal equations. The horizontal forces are: acceleration + Coriolis force = pressure gradient force + tractive force. As we discussed, the tide producing forces are a tiny fraction of the total magnitude of gravity, and so the vertical balance (for the long wavelength appropriate to tidal forcing) remains hydrostatic. Therefore, the relevant force, the tractive force, is the projection of the tide producing force onto the local horizontal direction. The equations are the same as those that govern rotating surface gravity waves and Kelvin waves. -

The Intraseasonal Equatorial Oceanic Kelvin Wave and the Central Pacific El Nino Phenomenon Kobi A
The intraseasonal equatorial oceanic Kelvin wave and the central Pacific El Nino phenomenon Kobi A. Mosquera Vasquez To cite this version: Kobi A. Mosquera Vasquez. The intraseasonal equatorial oceanic Kelvin wave and the central Pacific El Nino phenomenon. Climatology. Université Paul Sabatier - Toulouse III, 2015. English. NNT : 2015TOU30324. tel-01417276 HAL Id: tel-01417276 https://tel.archives-ouvertes.fr/tel-01417276 Submitted on 15 Dec 2016 HAL is a multi-disciplinary open access L’archive ouverte pluridisciplinaire HAL, est archive for the deposit and dissemination of sci- destinée au dépôt et à la diffusion de documents entific research documents, whether they are pub- scientifiques de niveau recherche, publiés ou non, lished or not. The documents may come from émanant des établissements d’enseignement et de teaching and research institutions in France or recherche français ou étrangers, des laboratoires abroad, or from public or private research centers. publics ou privés. 1 2 This thesis is dedicated to my daughter, Micaela. 3 Acknowledgments To my advisors, Drs. Boris Dewitte and Serena Illig, for the full academic support and patience in the development of this thesis; without that I would have not reached this goal. To IRD, for the three-year fellowship to develop my thesis which also include three research stays in the Laboratoire d'Etudes en Géophysique et Océanographie Spatiales (LEGOS). To Drs. Pablo Lagos and Ronald Woodman, Drs. Yves Du Penhoat and Yves Morel for allowing me to develop my research at the Instituto Geofísico del Perú (IGP) and the Laboratoire d'Etudes Spatiales in Géophysique et Oceanographic (LEGOS), respectively. -

El Niño: the Ocean in Climate El Niño: the Ocean in Climate
El Niño: The ocean in climate We live in the atmosphere: where is it sensitive to the ocean? ➞ The tropics! El Niño is the most spectacular short-term climate oscillation. It affects weather around the world, and illustrates the many aspects of O-A interaction Most of the poleward heat transport is by the atmosphere First hint that this may all be myth comes from using observations to estimate atmosphere and ocean(except heat in the tropics) transports Ocean and atmosphere heat transports Heat transport is poleward in &'()*('&+,-.,/01,2%""34,-5.67/.-5,89:,;9:.<=/:>,<-/.,.:/;5?9:.5 # both ocean and atmosphere: )D(B,E('1,F&G (DGCH,E('1,F&G )D(B,E('1,ID(F) Atmosphere (DGCH,E('1,ID(F) The role of the O-A system is $ Net radiation at Atmosphere (line) to move excess heat from the top of atmosphere tropics to the poles, where it Ocean (Dashed) Ocean = divergence of % is radiated to space. (AHT + OHT) " BC Net radiation Northward transport (PW) !% from satellites, AHT from weather obs !$ and models, OHT from residual Trenberth et al (2001) !# 80°S!!" 60°S!#" 40°S!$" 20°S!%" 0°" 20°N%" 40°N$" 60°N#" 80°N!" @/.6.A>- Most of the poleward transport occurs in mid-latitude winter storms near 40°S/N. Only in the tropics is the ocean really important. Much recent interest in the “global conveyor belt” But the timescales are very slow Does the Gulf Stream warm Europe? An example of the (largely) passive effect of the ocean Why is Ireland warmer than Labrador in winter? Because of need to conserve angular momentum, Rockies force a stationary wave in the westerlies with northerly flow (cooling) over eastern N.