Sousveillance (Undersight), and Metaveillance (Seeing Sight Itself)
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Mutual Watching and Resistance to Mass Surveillance After Snowden
Media and Communication (ISSN: 2183-2439) 2015, Volume 3, Issue 3, Pages 12-25 Doi: 10.17645/mac.v3i3.277 Article “Veillant Panoptic Assemblage”: Mutual Watching and Resistance to Mass Surveillance after Snowden Vian Bakir School of Creative Studies and Media, Bangor University, Bangor, LL57 2DG, UK; E-Mail: [email protected] Submitted: 9 April 2015 | In Revised Form: 16 July 2015 | Accepted: 4 August 2015 | Published: 20 October 2015 Abstract The Snowden leaks indicate the extent, nature, and means of contemporary mass digital surveillance of citizens by their intelligence agencies and the role of public oversight mechanisms in holding intelligence agencies to account. As such, they form a rich case study on the interactions of “veillance” (mutual watching) involving citizens, journalists, intelli- gence agencies and corporations. While Surveillance Studies, Intelligence Studies and Journalism Studies have little to say on surveillance of citizens’ data by intelligence agencies (and complicit surveillant corporations), they offer insights into the role of citizens and the press in holding power, and specifically the political-intelligence elite, to account. Atten- tion to such public oversight mechanisms facilitates critical interrogation of issues of surveillant power, resistance and intelligence accountability. It directs attention to the veillant panoptic assemblage (an arrangement of profoundly une- qual mutual watching, where citizens’ watching of self and others is, through corporate channels of data flow, fed back into state surveillance of citizens). Finally, it enables evaluation of post-Snowden steps taken towards achieving an equiveillant panoptic assemblage (where, alongside state and corporate surveillance of citizens, the intelligence-power elite, to ensure its accountability, faces robust scrutiny and action from wider civil society). -

The Use of Smartglasses in Everyday Life
University of Erfurt Faculty of Philosophy The Use of Smartglasses in Everyday Life A Grounded Theory Study Dissertation submitted in partial fulfillment of the requirements for the degree of Doctor of Philosophy (Dr. phil.) at the Faculty of Philosophy of the University of Erfurt submitted by Timothy Christoph Kessler from Munich November 2015 URN: urn:nbn:de:gbv:547-201600175 First Assessment: Prof. Dr. Joachim R. Höflich Second Assessment: Prof. Dr. Dr. Castulus Kolo Date of publication: 18th of April 2016 Abstract We live in a mobile world. Laptops, tablets and smartphones have never been as ubiquitous as they have been today. New technologies are invented on a daily basis, lead- ing to the altering of society on a macro level, and to the change of the everyday life on a micro level. Through the introduction of a new category of devices, wearable computers, we might experience a shift away from the traditional smartphone. This dissertation aims to examine the topic of smartglasses, especially Google Glass, and how these wearable devices are embedded into the everyday life and, consequently, into a society at large. The current research models which are concerned with mobile communication are only partly applicable due to the distinctive character of smartglasses. Furthermore, new legal and privacy challenges for smartglasses arise, which are not taken into account by ex- isting theories. Since the literature on smartglasses is close to non-existent, it is argued that new models need to be developed in order to fully understand the impact of smart- glasses on everyday life and society as a whole. -

Are Wearables Good Or Bad for Society? an Exploration of Societal Benefits, Risks and Consequences of Augmented Reality Smart Glasses
Are Wearables Good or Bad for Society? An Exploration of Societal Benefits, Risks and Consequences of Augmented Reality Smart Glasses. Daniel W.E. Hein, University of Bamberg Jennah Jodoin, University of Michigan-Dearborn Philipp A. Rauschnabel, University of Michigan-Dearborn Bjoern S. Ivens, University of Bamberg Abstract: Recent market research forecasts predict that a new form of wearable devices will soon influence the media landscape: Augmented Reality Smart Glasses. While prior research highlights numerous potentials in personal and professional settings of smart glasses, this technology has also triggered several controversies in public discussions, for example, the risk of violating privacy and copyright laws. Yet, little research addresses the questions of whether smart glasses are good or bad for societies, and if yes, why. This study conducts exploratory research to contribute to narrowing this gap. Based on a survey among consumers, we identify several societal benefits and risks that determine consumers’ evaluation of the anticipated and desired success of smart glasses. These findings lead to numerous important implications for consumers, scholars, managers, and policy makers. Introduction A recent study by Goldman Sachs (2016) asserts that Augmented reality (AR) smart glasses are the latest step in an evolution of digitization of reality and a large developing future market. What began with stationary computers that were temporarily online to receive and display information to their mostly business users in the last century turned into a network dominated by user-generated content (UGC), with users being mainly consumers that are permanently online and access the internet through a multitude of devices (Hennig-Thurau et al., 2010). -

The Future of Smart Glasses
The Future of Smart Glasses Forward-looking areas of research Prepared for Synoptik Foundation May 2014 Brian Due, PhD. Nextwork A/S Contents Smart&Glasses&and&Digitised&Vision&.....................................................................................................&3! 1.0&The&basis&of&the&project&...............................................................................................................................&4! 1.1!Contents!of!the!project!................................................................................................................................................!4! 2.0&The&historic&development&of&smart&glasses&..........................................................................................&5! 3.0&The&technological&conditions&and&functionalities,&and&various&products&..................................&8! 4.0&The&likely&scope&of&smart&glasses&within&the&next&3H5&years&...........................................................&9! 5.0&Likely&applications&of&smart&glasses&.....................................................................................................&12! 5.1!Specific!work6related!applications!......................................................................................................................!12! 5.2!Specific!task6related!applications!........................................................................................................................!12! 5.3!Self6tracking!applications!........................................................................................................................................!13! -

Veillance and Reciprocal Transparency: Surveillance Versus Sousveillance, AR Glass, Lifeglogging, and Wearable Computing
Veillance and Reciprocal Transparency: Surveillance versus Sousveillance, AR Glass, Lifeglogging, and Wearable Computing Steve Mann SurvVeillanCeNTRETM, 330 Dundas Street West, Toronto, Ontario, Canada, M5T 1G5 Abstract—This paper explores the interplay between surveil- lance cameras (cameras affixed to large-entities such as buildings) and sousveillance cameras (cameras affixed to small entities such as individual people), laying contextual groundwork for the social implications of Augmented/Augmediated Reality, Digital Eye Glass, and the wearable camera as a vision and visual memory aid in everyday life. We now live in a society in which we have both “the few watching the many” (surveillance), AND “the many watching the few” (sousveillance). Widespread sousveillance will cause a transition from our one-sided surveillance society back to a situation akin to olden times when the sheriff could see what everyone was doing AND everyone could see what the sheriff was doing. We name this neutral form of watching “veillance” — from the French word “veiller” which means “to watch”. Veillance is a broad concept that includes both surveillance (oversight) and sousveillance (undersight), as well as dataveillance, uberveillance, etc.. Fig. 1. Many business establishments prohibit cameras, e.g.: “NO It follows that: (1) sousveillance (undersight) is necessary CELL PHONES”; “NO CAMERAS”; “NO CELL PHONE IN STORE to a healthy, fair, and balanced society whenever surveillance PLEASE!”; and “No video or photo taking”, while at the same time (oversight) is already being used; and (2) sousveillance has nu- requiring customers to bring and use cameras in order to read QR codes merous moral, ethical, socioeconomic, humanistic/humanitarian, for pre-purchase product information. -
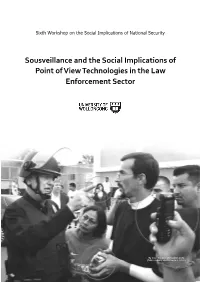
Sousveillance and the Social Implications of Point of View Technologies in the Law Enforcement Sector
Sixth Workshop on the Social Implications of National Security Sousveillance and the Social Implications of Point of View Technologies in the Law Enforcement Sector By Jesse.macadangdang (Own work) [Public domain] via Wikimedia Commons “...Rather than tolerating terrorism as a feedback means to restore the balance, an alternative framework would be to build a stable system to begin with, e.g. a system that is self-balancing. Such a society may be built with sousveillance (inverse surveillance) as a way to balance the increasing (and increasingly one-sided) surveillance.” Steve Mann (2002) http://wearcam.org/sousveillance.htm 2 Venue The University of Sydney, New Law Building, Level 4, Faculty Common Room, Eastern Avenue, Sydney Australia Date 22nd February 2012 Time 9:15 AM - 5:30 PM Sponsors Sponsored by the Research Network for a Secure Australia (RNSA). Co-sponsored by the Centre for Transnational Crime Prevention (CTCP) and the Institute for Innovation in Business and Social Research (IIBSOR) of the University of Wollongong (UOW). Workshop Description Policing today has become a high-tech affair; especially in the provision of incident event tracking and reporting systems increasingly being used to provide evidence in a court of law. These in-car video (ICV) and body worn recording systems are said to increase convictions and eliminate false claims made by defendants, providing documentary support to police officers and their associated actions in an incident. But today, new technologies such as smart phones equipped with cameras and global positioning system chipsets can also be found in the hands of the everyday citizen, used to capture everyday happenings and distributed to social networks with global reach. -

395 Privacy, Public Disclosure, Police Body Cameras
2 FAN - PRIVACY - 395-444 (DO NOT DELETE) 12/8/2016 9:45 AM PRIVACY, PUBLIC DISCLOSURE, POLICE BODY CAMERAS: POLICY SPLITS Mary D. Fan* ABSTRACT .................................................................................................. 396 INTRODUCTION .......................................................................................... 397 I. AFTER THE REVOLUTION: PRIVACY AND PUBLIC DISCLOSURE DILEMMAS ...................................................................................... 405 A. The Police-Worn Body Camera Revolution ............................ 407 B. The Clash Between Privacy and Public Disclosure ................ 411 1. Early-Mover States Strike Different Balances ................... 413 a. Nondisclosure .............................................................. 413 b. Filtered Disclosure ...................................................... 415 c. Camera Turn-Off and Turn-On Legislation ................ 417 2. Comparative Perspective: How the U.K. Strikes the Balance .............................................................................. 419 II. THE BALANCES BEING STRUCK IN BODY CAMERA POLICIES .............. 422 A. Collection and Coding Methods .............................................. 423 B. Policy Splits Over Privacy Protection ..................................... 426 III. A PAIR OF PROPOSALS TO ADDRESS TWO DISTURBING TRENDS ........ 430 A. Automated Redaction Rather than Broad or Blanket Exemptions .............................................................................. 431 -

The Gendered Engagement of Canadaâ•Žs National Affairs And
Journal of Professional Communication 1(1):81-97, 2011 Journal of Professional Communication The gendered engagement of Canada’s national affairs and legislative elite, online Denise Brunsdon★ GCI Group, Toronto (Canada) A R T I C L E I N F O A B S T R A C T Article Type: This paper explores the differences in style and impact of online Research article engagement by gender for Members of Parliament, national affairs journalists and top lawyers. The author assesses the degree to which Article History: men and women in these circles participate in blogging, Twitter, Received: 2011-04-10 LinkedIn and Facebook. The findings demonstrate that, although Revised: 2011-08-04 professional women often participate in all social media platforms Accepted: 2011-10-25 as much as men, and sometimes more, men tend to have larger fol- lowings of fans and readers. Potential reasons for this discrepancy Key Words: are discussed. Blogging Twitter Political Communication Gender ©Journal of Professional Communication, all rights reserved. n unlikely force generated the idea for a paper assessing the role of gender in online engagement among Canada’s national affairs and legislative elites. The motivation behind this research came from a column by Margaret Wente in the Globe and Mail about her refusal toA blog. With less rigorous logic than is displayed in many blog posts, she iron- ically claims that blogging is thoughtless, ergo male, ergo blarney. According to Wente, the main negative to blogging is the lack of time allot- ted by the medium to learn and shape opinions about issues, and that the main benefit is a self-indulgent display of intellectual egoism. -
Ethical Issues
ETHICAL IMPLICATIONS OF EMERGING MIXED REALITY TECHNOLOGIES Marcus Carter and Ben Egliston Socio-Tech Futures Lab Published June 2020 by the Socio-Tech Futures Lab and Department of Media and Communication, Faculty of Arts and Social Sciences, the University of Sydney NSW 2006 Australia. © Marcus Carter and Ben Egliston The authors expressly allow reproduction and dissemination of this document for non- commercial purposes pursuant to the Creative Commons Attribution-NonCommercial-NoDerivs 3.0 Australia (CC BY-NC-ND 3.0 AU). For further details see https://creativecommons.org/licenses/ by-nc-nd/3.0/au/ The Ethics of Emerging Mixed Realities project is partly funded by the Socio-Tech Futures Lab, a flagship research theme of the Faculty of Arts and Social Sciences. For more information on the Socio-Tech Futures Lab see: https://www.sydney. edu.au/arts/our-research/futurefix/socio-tech- futures-lab.html This report is available via the Sydney eScholarship https://ses.library.usyd.edu.au/handle/2123/22485 Repository, and can be downloaded from https://doi.org/10.25910/5ee2f9608ec4d (DOI: 10.25910/5ee2f9608ec4d) CONTENTS ABSTRACT 2 NOTES ON AUTHORS 3 ACKNOWLEDGEMENTS 4 INTRODUCTION 5 Definitions 5 ETHICAL FRAMEWORKS FOR VR AND AR 7 EXPECTATIONS OF PRIVACY IN PUBLIC SPACE 8 ACCESSIBILITY, INCLUSIVITY AND EXCLUSION 12 SURVEILLANCE AND PLATFORM POWER 17 THE MILITARY-ENTERTAINMENT COMPLEX 21 EMPATHY 25 WORK 27 APPENDIX 30 Methodology 30 REFERENCES 31 1 ABSTRACT Virtual and Augmented Reality technologies are increasingly finding foothold in culture and society. As these technologies stake out an increasingly large space in areas like entertainment, work, health and communication, it is important that we are equipped to think lucidly about both their benefits and their drawbacks. -

Encountering Camera Surveillance and Accountability at Work – Case Study of the Swedish Police Marie Eneman [email protected]
Association for Information Systems AIS Electronic Library (AISeL) UK Academy for Information Systems Conference UK Academy for Information Systems Proceedings 2018 Spring 3-20-2018 Encountering camera surveillance and accountability at work – case study of the Swedish police Marie Eneman [email protected] Jan Ljungberg [email protected] Bertil Rolsson [email protected] Dick Stenmark [email protected] Follow this and additional works at: https://aisel.aisnet.org/ukais2018 Recommended Citation Eneman, Marie; Ljungberg, Jan; Rolsson, Bertil; and Stenmark, Dick, "Encountering camera surveillance and accountability at work – case study of the Swedish police" (2018). UK Academy for Information Systems Conference Proceedings 2018. 20. https://aisel.aisnet.org/ukais2018/20 This material is brought to you by the UK Academy for Information Systems at AIS Electronic Library (AISeL). It has been accepted for inclusion in UK Academy for Information Systems Conference Proceedings 2018 by an authorized administrator of AIS Electronic Library (AISeL). For more information, please contact [email protected]. Encountering camera surveillance and accountability at work – case study of the Swedish police Research-in-progress Abstract Today’s mobile cameras mean that anyone may easily be filmed and exposed to a wider audience meanwhile conducting their daily work. Police officers belong to an occupation that most frequently have to encounter this development. As state representatives, entitled to make use of violence at work, they end up being held accountable by a variety of actors capturing police initiatives on film. Police authorities around the world therefore have started to use body-worn cameras, aiming to enhance trust and transparency, but also as a means to control their work environment. -

Dialogue Police Bodycams As Equiveillance Tools?: Reflections on the Debate in the Netherlands
Police Bodycams as Equiveillance Tools?: Dialogue Reflections on the Debate in the Netherlands Lotte Houwing Gerard Jan Ritsema van Eck Bits of Freedom, The Netherlands University of Groningen, The Netherlands [email protected] [email protected] Abstract In the United States of America, police body-worn cameras (bodycams) were introduced to protect civilians against violence by law enforcement authorities. In the Netherlands, however, the same technology has been introduced to record and discipline the behavior of the growing number of citizens using their smartphone cameras to film the (mis)conduct of police. In answer to these citizens sousveilling the police and publishing their images on social media, the bodycam was introduced as an objective referee that also includes the perspective of the police officer. According to this view, the bodycam is a tool of equiveillance: a situation with a diversity of perspectives in which surveillance and sousveillance are in balance (Mann 2005). Various factors, however, hamper the equiveillant usage of bodycams in the Netherlands. Firstly, the attachment of the bodycam to the uniform of the officer leads to an imbalanced representation of perspectives. The police perspective is emphasized by the footage that is literally taken from their perspective, in which others are filmed slightly from below, making them look bigger and more overwhelming. Also, the police officers’ movements create shaky footage with deceptive intensity that invokes the image of a hectic situation that calls for police action. Secondly, it is the officer who decides when to wear a camera and when to start and stop recording. -

Article Protesters' Reactions to Video Surveillance of Demonstrations
Protesters’ Reactions to Video Surveillance of Demonstrations: Counter-Moves, Security Article Cultures, and the Spiral of Surveillance and Counter-Surveillance Peter Ullrich Philipp Knopp Technische Universität Berlin, Germany Technische Universität Berlin, Germany [email protected] [email protected] Abstract This article analyses protesters’ reactions to police video surveillance of demonstrations in Germany. Theoretically, we draw on the concept of a “spiral of surveillance and counter-surveillance” to understand the interaction processes which—intentionally or not—contribute to the deepening of the “surveillant assemblage” in the field of protest policing. After introducing video surveillance and its importance for selective protest policing, we discuss concepts of counter-surveillance. Widening the individualist scope of former research on “neutralisation techniques,” collective and interactive dimensions are added to cover the full counter-surveillance repertoire. We identified six basic categories of counter-surveillance moves: consider cameras, disguise, attack, hide, sousveillance, and cooperation. They can be classified along the axes of (a) degree of cooperation with the police, and (b) directedness (inwards/outward). It becomes obvious that activists are not predominantly deterred by video surveillance but adapt to the situation. If and how certain counter-surveillance moves are applied depends on the degree of exposure, perceptions of conflict dynamics, political interpretations, and on how these factors are processed in the respective security cultures. Security cultures, which are grounded in the respective relations between protest groups and police, are collective sets of practices and interpretive patterns aimed at securing safety and/or anonymity of activists as well as making their claims visible. Thus, they are productive power effects, resulting from the very conditions under which protest takes place in contemporary surveillance societies.