'Convex Segmentochora' (Pdf)
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Geometry of Generalized Permutohedra
Geometry of Generalized Permutohedra by Jeffrey Samuel Doker A dissertation submitted in partial satisfaction of the requirements for the degree of Doctor of Philosophy in Mathematics in the Graduate Division of the University of California, Berkeley Committee in charge: Federico Ardila, Co-chair Lior Pachter, Co-chair Matthias Beck Bernd Sturmfels Lauren Williams Satish Rao Fall 2011 Geometry of Generalized Permutohedra Copyright 2011 by Jeffrey Samuel Doker 1 Abstract Geometry of Generalized Permutohedra by Jeffrey Samuel Doker Doctor of Philosophy in Mathematics University of California, Berkeley Federico Ardila and Lior Pachter, Co-chairs We study generalized permutohedra and some of the geometric properties they exhibit. We decompose matroid polytopes (and several related polytopes) into signed Minkowski sums of simplices and compute their volumes. We define the associahedron and multiplihe- dron in terms of trees and show them to be generalized permutohedra. We also generalize the multiplihedron to a broader class of generalized permutohedra, and describe their face lattices, vertices, and volumes. A family of interesting polynomials that we call composition polynomials arises from the study of multiplihedra, and we analyze several of their surprising properties. Finally, we look at generalized permutohedra of different root systems and study the Minkowski sums of faces of the crosspolytope. i To Joe and Sue ii Contents List of Figures iii 1 Introduction 1 2 Matroid polytopes and their volumes 3 2.1 Introduction . .3 2.2 Matroid polytopes are generalized permutohedra . .4 2.3 The volume of a matroid polytope . .8 2.4 Independent set polytopes . 11 2.5 Truncation flag matroids . 14 3 Geometry and generalizations of multiplihedra 18 3.1 Introduction . -
![The Geometry of Nim Arxiv:1109.6712V1 [Math.CO] 30](https://docslib.b-cdn.net/cover/8642/the-geometry-of-nim-arxiv-1109-6712v1-math-co-30-48642.webp)
The Geometry of Nim Arxiv:1109.6712V1 [Math.CO] 30
The Geometry of Nim Kevin Gibbons Abstract We relate the Sierpinski triangle and the game of Nim. We begin by defining both a new high-dimensional analog of the Sierpinski triangle and a natural geometric interpretation of the losing positions in Nim, and then, in a new result, show that these are equivalent in each finite dimension. 0 Introduction The Sierpinski triangle (fig. 1) is one of the most recognizable figures in mathematics, and with good reason. It appears in everything from Pascal's Triangle to Conway's Game of Life. In fact, it has already been seen to be connected with the game of Nim, albeit in a very different manner than the one presented here [3]. A number of analogs have been discovered, such as the Menger sponge (fig. 2) and a three-dimensional version called a tetrix. We present, in the first section, a generalization in higher dimensions differing from the more typical simplex generalization. Rather, we define a discrete Sierpinski demihypercube, which in three dimensions coincides with the simplex generalization. In the second section, we briefly review Nim and the theory behind optimal play. As in all impartial games (games in which the possible moves depend only on the state of the game, and not on which of the two players is moving), all possible positions can be divided into two classes - those in which the next player to move can force a win, called N-positions, and those in which regardless of what the next player does the other player can force a win, called P -positions. -
Build a Tetrahedral Kite
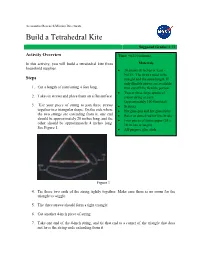
Aeronautics Research Mission Directorate Build a Tetrahedral Kite Suggested Grades: 8-12 Activity Overview Time: 90-120 minutes In this activity, you will build a tetrahedral kite from Materials household supplies. • 24 straws (8 inches or less) - NOTE: The straws need to be Steps straight and the same length. If only flexible straws are available, 1. Cut a length of yarn/string 4 feet long. then cut off the flexible portion. • Two or three large spools of 2. Take six straws and place them on a flat surface. cotton string or yarn (approximately 100 feet total) 3. Use your piece of string to join three straws • Scissors together in a triangular shape. On the side where • Hot glue gun and hot glue sticks the two strings are extending from it, one end • Ruler or dowel rod for kite bridle should be approximately 20 inches long, and the • Four pieces of tissue paper (24 x other should be approximately 4 inches long. 18 inches or larger) See Figure 1. • All-purpose glue stick Figure 1 4. Tie these two ends of the string tightly together. Make sure there is no room for the triangle to wiggle. 5. The three straws should form a tight triangle. 6. Cut another 4-inch piece of string. 7. Take one end of the 4-inch string, and tie that end to a corner of the triangle that does not have the string ends extending from it. Figure 2. 8. Add two more straws onto the longest piece of string. 9. Next, take the string that holds the two additional straws and tie it to the end of one of the 4-inch strings to make another tight triangle. -

On the Archimedean Or Semiregular Polyhedra
ON THE ARCHIMEDEAN OR SEMIREGULAR POLYHEDRA Mark B. Villarino Depto. de Matem´atica, Universidad de Costa Rica, 2060 San Jos´e, Costa Rica May 11, 2005 Abstract We prove that there are thirteen Archimedean/semiregular polyhedra by using Euler’s polyhedral formula. Contents 1 Introduction 2 1.1 RegularPolyhedra .............................. 2 1.2 Archimedean/semiregular polyhedra . ..... 2 2 Proof techniques 3 2.1 Euclid’s proof for regular polyhedra . ..... 3 2.2 Euler’s polyhedral formula for regular polyhedra . ......... 4 2.3 ProofsofArchimedes’theorem. .. 4 3 Three lemmas 5 3.1 Lemma1.................................... 5 3.2 Lemma2.................................... 6 3.3 Lemma3.................................... 7 4 Topological Proof of Archimedes’ theorem 8 arXiv:math/0505488v1 [math.GT] 24 May 2005 4.1 Case1: fivefacesmeetatavertex: r=5. .. 8 4.1.1 At least one face is a triangle: p1 =3................ 8 4.1.2 All faces have at least four sides: p1 > 4 .............. 9 4.2 Case2: fourfacesmeetatavertex: r=4 . .. 10 4.2.1 At least one face is a triangle: p1 =3................ 10 4.2.2 All faces have at least four sides: p1 > 4 .............. 11 4.3 Case3: threefacesmeetatavertes: r=3 . ... 11 4.3.1 At least one face is a triangle: p1 =3................ 11 4.3.2 All faces have at least four sides and one exactly four sides: p1 =4 6 p2 6 p3. 12 4.3.3 All faces have at least five sides and one exactly five sides: p1 =5 6 p2 6 p3 13 1 5 Summary of our results 13 6 Final remarks 14 1 Introduction 1.1 Regular Polyhedra A polyhedron may be intuitively conceived as a “solid figure” bounded by plane faces and straight line edges so arranged that every edge joins exactly two (no more, no less) vertices and is a common side of two faces. -

Geometric Shapes and Cut Sections
GEOMETRIC SHAPES AND CUT SECTIONS MODEL NO: EG.GEO • Wooden and Perspex Material • Long Life and Sturdy • Solid and Hollow sections • Clear Labeling • Small and Large sizes • Magnetic Fractions also Available Object Drawing Models Interpenetration of Solids Models Dissected and Non-Dissected • Two Cylinders of Different Diameters Cube Penetrating Each Other at Right Angles Cone • Two Cylinders of Different Diameters with Sphere Oblique Penetration Cylinder • A Cylinder into a Cone with Oblique Rectangular Prism Penetration Rectangular Pyramid • A Cone & Cylinder with Penetration at Triangular Prism Right Angles Triangular Pyramid • Two Cones at Right Angles Square Prism • Two Square Prisms of Different Sizes at Square Pyramid Right Angles Pentagonal Prism • Two Square Prisms at Oblique Angles Pentagonal Pyramid • Sphere & Cone at Centre Hexagonal Prism • Sphere & Cylinder Eccentric Hexagonal Pyramid • Sphere &Cylinder at Centre Octagonal Prism Octagonal Pyramid Decagonal Prism Decagonal Pyramid Development of Surface for all Shapes *Oblique Polyhedrons for Above Available Available TEACHING AIDS FOR ENGINEERING DRAWING Set of Cut Sectioned Geometric Shapes Set of Solid Wooden Prism and Pyramids Set of Oblique Polyhedrons Set of Geometric Shapes with Development of Surface Paper Nets * Mechmatics reserves the right to modify its Product without notice * In the interest of continued improvements to our products, we reserve the right to change specifications without prior notification. Common Examples of Loci of Point with Pencil tracing position and Theoretical Diagrams * In the interest of continued improvements to our products, we reserve the right to change specifications without prior notification. DEVELOPMENT OF SURFACES MODEL ED.DS A development is the unfold / unrolled flat / plane figure of a 3-D object. -

THE GEOMETRY of PYRAMIDS One of the More Interesting Solid
THE GEOMETRY OF PYRAMIDS One of the more interesting solid structures which has fascinated individuals for thousands of years going all the way back to the ancient Egyptians is the pyramid. It is a structure in which one takes a closed curve in the x-y plane and connects straight lines between every point on this curve and a fixed point P above the centroid of the curve. Classical pyramids such as the structures at Giza have square bases and lateral sides close in form to equilateral triangles. When the closed curve becomes a circle one obtains a cone and this cone becomes a cylindrical rod when point P is moved to infinity. It is our purpose here to discuss the properties of all N sided pyramids including their volume and surface area using only elementary calculus and geometry. Our starting point will be the following sketch- The base represents a regular N sided polygon with side length ‘a’ . The angle between neighboring radial lines r (shown in red) connecting the polygon vertices with its centroid is θ=2π/N. From this it follows, by the law of cosines, that the length r=a/sqrt[2(1- cos(θ))] . The area of the iscosolis triangle of sides r-a-r is- a a 2 a 2 1 cos( ) A r 2 T 2 4 4 (1 cos( ) From this we have that the area of the N sided polygon and hence the pyramid base will be- 2 2 1 cos( ) Na A N base 2 4 1 cos( ) N 2 It readily follows from this result that a square base N=4 has area Abase=a and a hexagon 2 base N=6 yields Abase= 3sqrt(3)a /2. -

The Continuum of Space Architecture: from Earth to Orbit
42nd International Conference on Environmental Systems AIAA 2012-3575 15 - 19 July 2012, San Diego, California The Continuum of Space Architecture: From Earth to Orbit Marc M. Cohen1 Marc M. Cohen Architect P.C. – Astrotecture™, Palo Alto, CA, 94306 Space architects and engineers alike tend to see spacecraft and space habitat design as an entirely new departure, disconnected from the Earth. However, at least for Space Architecture, there is a continuum of development since the earliest formalizations of terrestrial architecture. Moving out from 1-G, Space Architecture enables the continuum from 1-G to other gravity regimes. The history of Architecture on Earth involves finding new ways to resist Gravity with non-orthogonal structures. Space Architecture represents a new milestone in this progression, in which gravity is reduced or altogether absent from the habitable environment. I. Introduction EOMETRY is Truth2. Gravity is the constant.3 Gravity G is the constant – perhaps the only constant – in the evolution of life on Earth and the human response to the Earth’s environment.4 The Continuum of Architecture arises from geometry in building as a primary human response to gravity. It leads to the development of fundamental components of construction on Earth: Column, Wall, Floor, and Roof. According to the theoretician Abbe Laugier, the column developed from trees; the column engendered the wall, as shown in FIGURE 1 his famous illustration of “The Primitive Hut.” The column aligns with the human bipedal posture, where the spine, pelvis, and legs are the gravity- resisting structure. Caryatids are the highly literal interpretation of this phenomenon of standing to resist gravity, shown in FIGURE 2. -

Composite Concave Cupolae As Geometric and Architectural Forms
Journal for Geometry and Graphics Volume 19 (2015), No. 1, 79–91. Composite Concave Cupolae as Geometric and Architectural Forms Slobodan Mišić1, Marija Obradović1, Gordana Ðukanović2 1Faculty of Civil Engineering, University of Belgrade Bulevar kralja Aleksandra 73, 11000 Belgrade, Serbia emails: [email protected], [email protected] 2Faculty of Forestry, University of Belgrade, Serbia email: [email protected] Abstract. In this paper, the geometry of concave cupolae has been the starting point for the generation of composite polyhedral structures, usable as formative patterns for architectural purposes. Obtained by linking paper folding geometry with the geometry of polyhedra, concave cupolae are polyhedra that follow the method of generating cupolae (Johnson’s solids: J3, J4 and J5); but we removed the convexity criterion and omitted squares in the lateral surface. Instead of alter- nating triangles and squares there are now two or more paired series of equilateral triangles. The criterion of face regularity is respected, as well as the criterion of multiple axial symmetry. The distribution of the triangles is based on strictly determined and mathematically defined parameters, which allows the creation of such structures in a way that qualifies them as an autonomous group of polyhedra — concave cupolae of sorts II, IV, VI (2N). If we want to see these structures as polyhedral surfaces (not as solids) connecting the concept of the cupola (dome) in the architectural sense with the geometrical meaning of (concave) cupola, we re- move the faces of the base polygons. Thus we get a deltahedral structure — a shell made entirely from equilateral triangles, which is advantageous for the purpose of prefabrication. -

1 Lifts of Polytopes
Lecture 5: Lifts of polytopes and non-negative rank CSE 599S: Entropy optimality, Winter 2016 Instructor: James R. Lee Last updated: January 24, 2016 1 Lifts of polytopes 1.1 Polytopes and inequalities Recall that the convex hull of a subset X n is defined by ⊆ conv X λx + 1 λ x0 : x; x0 X; λ 0; 1 : ( ) f ( − ) 2 2 [ ]g A d-dimensional convex polytope P d is the convex hull of a finite set of points in d: ⊆ P conv x1;:::; xk (f g) d for some x1;:::; xk . 2 Every polytope has a dual representation: It is a closed and bounded set defined by a family of linear inequalities P x d : Ax 6 b f 2 g for some matrix A m d. 2 × Let us define a measure of complexity for P: Define γ P to be the smallest number m such that for some C s d ; y s ; A m d ; b m, we have ( ) 2 × 2 2 × 2 P x d : Cx y and Ax 6 b : f 2 g In other words, this is the minimum number of inequalities needed to describe P. If P is full- dimensional, then this is precisely the number of facets of P (a facet is a maximal proper face of P). Thinking of γ P as a measure of complexity makes sense from the point of view of optimization: Interior point( methods) can efficiently optimize linear functions over P (to arbitrary accuracy) in time that is polynomial in γ P . ( ) 1.2 Lifts of polytopes Many simple polytopes require a large number of inequalities to describe. -

Geometry © 2000 Springer-Verlag New York Inc
Discrete Comput Geom OF1–OF15 (2000) Discrete & Computational DOI: 10.1007/s004540010046 Geometry © 2000 Springer-Verlag New York Inc. Convex and Linear Orientations of Polytopal Graphs J. Mihalisin and V. Klee Department of Mathematics, University of Washington, Box 354350, Seattle, WA 98195-4350, USA {mihalisi,klee}@math.washington.edu Abstract. This paper examines directed graphs related to convex polytopes. For each fixed d-polytope and any acyclic orientation of its graph, we prove there exist both convex and concave functions that induce the given orientation. For each combinatorial class of 3-polytopes, we provide a good characterization of the orientations that are induced by an affine function acting on some member of the class. Introduction A graph is d-polytopal if it is isomorphic to the graph G(P) formed by the vertices and edges of some (convex) d-polytope P. As the term is used here, a digraph is d-polytopal if it is isomorphic to a digraph that results when the graph G(P) of some d-polytope P is oriented by means of some affine function on P. 3-Polytopes and their graphs have been objects of research since the time of Euler. The most important result concerning 3-polytopal graphs is the theorem of Steinitz [SR], [Gr1], asserting that a graph is 3-polytopal if and only if it is planar and 3-connected. Also important is the related fact that the combinatorial type (i.e., the entire face-lattice) of a 3-polytope P is determined by the graph G(P). Steinitz’s theorem has been very useful in studying the combinatorial structure of 3-polytopes because it makes it easy to recognize the 3-polytopality of a graph and to construct graphs that represent 3-polytopes without producing an explicit geometric realization. -

Archimedean Solids
University of Nebraska - Lincoln DigitalCommons@University of Nebraska - Lincoln MAT Exam Expository Papers Math in the Middle Institute Partnership 7-2008 Archimedean Solids Anna Anderson University of Nebraska-Lincoln Follow this and additional works at: https://digitalcommons.unl.edu/mathmidexppap Part of the Science and Mathematics Education Commons Anderson, Anna, "Archimedean Solids" (2008). MAT Exam Expository Papers. 4. https://digitalcommons.unl.edu/mathmidexppap/4 This Article is brought to you for free and open access by the Math in the Middle Institute Partnership at DigitalCommons@University of Nebraska - Lincoln. It has been accepted for inclusion in MAT Exam Expository Papers by an authorized administrator of DigitalCommons@University of Nebraska - Lincoln. Archimedean Solids Anna Anderson In partial fulfillment of the requirements for the Master of Arts in Teaching with a Specialization in the Teaching of Middle Level Mathematics in the Department of Mathematics. Jim Lewis, Advisor July 2008 2 Archimedean Solids A polygon is a simple, closed, planar figure with sides formed by joining line segments, where each line segment intersects exactly two others. If all of the sides have the same length and all of the angles are congruent, the polygon is called regular. The sum of the angles of a regular polygon with n sides, where n is 3 or more, is 180° x (n – 2) degrees. If a regular polygon were connected with other regular polygons in three dimensional space, a polyhedron could be created. In geometry, a polyhedron is a three- dimensional solid which consists of a collection of polygons joined at their edges. The word polyhedron is derived from the Greek word poly (many) and the Indo-European term hedron (seat). -

The Mars Pentad Time Pyramids the Quantum Space Time Fractal Harmonic Codex the Pentagonal Pyramid
The Mars Pentad Time Pyramids The Quantum Space Time Fractal Harmonic Codex The Pentagonal Pyramid Abstract: Early in this author’s labors while attempting to create the original Mars Pentad Time Pyramids document and pyramid drawings, a failure was experienced trying to develop a pentagonal pyramid with some form of tetrahedral geometry. This pentagonal pyramid is now approached again and refined to this tetrahedral criteria, creating tetrahedral angles in the pentagonal pyramid, and pentagonal [54] degree angles in the pentagon base for the pyramid. In the process another fine pentagonal pyramid was developed with pure pentagonal geometries using the value for ancient Egyptian Pyramid Pi = [22 / 7] = [aPi]. Also used is standard modern Pi and modern Phi in one of the two pyramids shown. Introduction: Achieved are two Pentagonal Pyramids: One creates tetrahedral angle [54 .735~] in the Side Angle {not the Side Face Angle}, using a novel height of the value of tetrahedral angle [19 .47122061] / by [5], and then the reverse tetrahedral angle is accomplished with the same tetrahedral [19 .47122061] angle value as the height, but “Harmonic Codexed” to [1 .947122061]! This achievement of using the second height mentioned, proves aspects of the Quantum Space Time Fractal Harmonic Codex. Also used is Height = [2], which replicates the [36] and [54] degree angles in the pentagon base to the Side Angles of the Pentagonal Pyramid. I have come to understand that there is not a “perfect” pentagonal pyramid. No matter what mathematical constants or geometry values used, there will be a slight factor of error inherent in the designs trying to attain tetrahedra.