Downloaded 09/29/21 03:20 PM UTC 740 WEATHER and FORECASTING VOLUME 35
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Wildland Fire Incident Management Field Guide
A publication of the National Wildfire Coordinating Group Wildland Fire Incident Management Field Guide PMS 210 April 2013 Wildland Fire Incident Management Field Guide April 2013 PMS 210 Sponsored for NWCG publication by the NWCG Operations and Workforce Development Committee. Comments regarding the content of this product should be directed to the Operations and Workforce Development Committee, contact and other information about this committee is located on the NWCG Web site at http://www.nwcg.gov. Questions and comments may also be emailed to [email protected]. This product is available electronically from the NWCG Web site at http://www.nwcg.gov. Previous editions: this product replaces PMS 410-1, Fireline Handbook, NWCG Handbook 3, March 2004. The National Wildfire Coordinating Group (NWCG) has approved the contents of this product for the guidance of its member agencies and is not responsible for the interpretation or use of this information by anyone else. NWCG’s intent is to specifically identify all copyrighted content used in NWCG products. All other NWCG information is in the public domain. Use of public domain information, including copying, is permitted. Use of NWCG information within another document is permitted, if NWCG information is accurately credited to the NWCG. The NWCG logo may not be used except on NWCG-authorized information. “National Wildfire Coordinating Group,” “NWCG,” and the NWCG logo are trademarks of the National Wildfire Coordinating Group. The use of trade, firm, or corporation names or trademarks in this product is for the information and convenience of the reader and does not constitute an endorsement by the National Wildfire Coordinating Group or its member agencies of any product or service to the exclusion of others that may be suitable. -

An Operational Marine Fog Prediction Model
U. S. DEPARTMENT OF COMMERCE NATIONAL OCEANIC AND ATMOSPHERIC ADMINISTRATION NATIONAL WEATHER SERVICE NATIONAL METEOROLOGICAL CENTER OFFICE NOTE 371 An Operational Marine Fog Prediction Model JORDAN C. ALPERTt DAVID M. FEIT* JUNE 1990 THIS IS AN UNREVIEWED MANUSCRIPT, PRIMARILY INTENDED FOR INFORMAL EXCHANGE OF INFORMATION AMONG NWS STAFF MEMBERS t Global Weather and Climate Modeling Branch * Ocean Products Center OPC contribution No. 45 An Operational Marine Fog Prediction Model Jordan C. Alpert and David M. Feit NOAA/NMC, Development Division Washington D.C. 20233 Abstract A major concern to the National Weather Service marine operations is the problem of forecasting advection fogs at sea. Currently fog forecasts are issued using statistical methods only over the open ocean domain but no such system is available for coastal and offshore areas. We propose to use a partially diagnostic model, designed specifically for this problem, which relies on output fields from the global operational Medium Range Forecast (MRF) model. The boundary and initial conditions of moisture and temperature, as well as the MRF's horizontal wind predictions are interpolated to the fog model grid over an arbitrarily selected coastal and offshore ocean region. The moisture fields are used to prescribe a droplet size distribution and compute liquid water content, neither of which is accounted for in the global model. Fog development is governed by the droplet size distribution and advection and exchange of heat and moisture. A simple parameterization is used to describe the coefficients of evaporation and sensible heat exchange at the surface. Depletion of the fog is based on droplet fallout of the three categories of assumed droplet size. -
Lecture 18 Condensation And
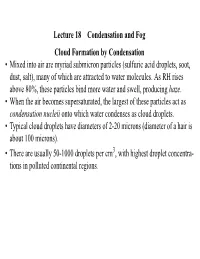
Lecture 18 Condensation and Fog Cloud Formation by Condensation • Mixed into air are myriad submicron particles (sulfuric acid droplets, soot, dust, salt), many of which are attracted to water molecules. As RH rises above 80%, these particles bind more water and swell, producing haze. • When the air becomes supersaturated, the largest of these particles act as condensation nucleii onto which water condenses as cloud droplets. • Typical cloud droplets have diameters of 2-20 microns (diameter of a hair is about 100 microns). • There are usually 50-1000 droplets per cm3, with highest droplet concentra- tions in polluted continental regions. Why can you often see your breath? Condensation can occur when warm moist (but unsaturated air) mixes with cold dry (and unsat- urated) air (also contrails, chimney steam, steam fog). Temp. RH SVP VP cold air (A) 0 C 20% 6 mb 1 mb(clear) B breath (B) 36 C 80% 63 mb 55 mb(clear) C 50% cold (C)18 C 140% 20 mb 28 mb(fog) 90% cold (D) 4 C 90% 8 mb 6 mb(clear) D A • The 50-50 mix visibly condenses into a short- lived cloud, but evaporates as breath is EOM 4.5 diluted. Fog Fog: cloud at ground level Four main types: radiation fog, advection fog, upslope fog, steam fog. TWB p. 68 • Forms due to nighttime longwave cooling of surface air below dew point. • Promoted by clear, calm, long nights. Common in Seattle in winter. • Daytime warming of ground and air ‘burns off’ fog when temperature exceeds dew point. • Fog may lift into a low cloud layer when it thickens or dissipates. -

Chapter 4: Fog
CHAPTER 4: FOG Fog is a double threat to boaters. It not only reduces visibility but also distorts sound, making collisions with obstacles – including other boats – a serious hazard. 1. Introduction Fog is a low-lying cloud that forms at or near the surface of the Earth. It is made up of tiny water droplets or ice crystals suspended in the air and usually gets its moisture from a nearby body of water or the wet ground. Fog is distinguished from mist or haze only by its density. In marine forecasts, the term “fog” is used when visibility is less than one nautical mile – or approximately two kilometres. If visibility is greater than that, but is still reduced, it is considered mist or haze. It is important to note that foggy conditions are reported on land only if visibility is less than half a nautical mile (about one kilometre). So boaters may encounter fog near coastal areas even if it is not mentioned in land-based forecasts – or particularly heavy fog, if it is. Fog Caused Worst Maritime Disaster in Canadian History The worst maritime accident in Canadian history took place in dense fog in the early hours of the morning on May 29, 1914, when the Norwegian coal ship Storstadt collided with the Canadian Pacific ocean liner Empress of Ireland. More than 1,000 people died after the Liverpool-bound liner was struck in the side and sank less than 15 minutes later in the frigid waters of the St. Lawrence River near Rimouski, Quebec. The Captain of the Empress told an inquest that he had brought his ship to a halt and was waiting for the weather to clear when, to his horror, a ship emerged from the fog, bearing directly upon him from less than a ship’s length away. -

B-100063 Cloud-Seeding Activities Carried out in the United States
WASHINGXJN. O.C. 205.48 13-100063 Schweikcr: LM096545 This is in response to your request of September 22, .2-o 1971, for certain background informatio-n on cloud-seeding activities carried out -...-in _-..T---*the .Unitc.b_S~.~-~,.under programs supported-by the Federal agencies. Pursuant to the specific xz2- questions contained in your request, we directed our:review toward developing information-----a-=v-~ .,- , L-..-”on- .-cloud-seeding ,__ ._ programs sup- ported by Federal agencies, on the cost- ‘and purposes of such progrys, on the impact of cloud seeding on precipitation and severe storms, and on the types of chemicals used for seeding and their effect on the--environment. We also ob- tained dafa cdncerning the extent of cloud seeding conducted over Pennsylvania. Our review was conducted at various Federal departments ’ and agencies headquartered in Washington, D.C., and at cer- tain of their field offices in Colorado and Montana. We in- terviewed cognizant agency officials and reviewed appropriate records and files of the agencies. In addition, we reviewed pertinent reports and documentation of the Federal Council for Science and Technology, the National Academy of Sciences, and the National Water Commission. BACKGROUND AND COST DATA Several Federal agencies support weather modification programs which involve cloud-seeding activities. Major re- search programs include precipitation modification, fog and cloud modification, hail suppression, and lightning and hur- ricane modification. Statistics compiled by the Interdepartmental Committee for Atmospheric Sciences showed that costs for federally spon- sored weather modification rograms during fiscal years 1959 through 1970 totaled about %‘74 million; estimated costs for fiscal years 1971 and 1972 totaled about $35 million. -
Microclimates
Microclimates National Meteorological Library and Archive Fact sheet 14 — Microclimates The National Meteorological Library and Archive Many people have an interest in the weather and the processes that cause it and the National Meteorological Library and Archive is a treasure trove of meteorological and related information. We are open to everyone The Library and Archive are vital for maintaining the public memory of the weather, storing meteorological records and facilitating learning, just go to www.metoffice.gov.uk/research/library-and-archive Our collections We hold a world class collection on meteorology which includes a comprehensive library of published books, journals and reports as well as a unique archive of original meteorological data, weather charts, private weather diaries and much more. These records provide access to historical data and give a snapshot of life and the weather both before and after the establishment of the Met Office in 1854 when official records began. Online catalogue Details of all our holdings are catalogued and online public access to this is available at https://library. metoffice.gov.uk. From here you will also be able to directly access any of our electronic content. Factsheets The Met Office produces a range of factsheets which are available through our web pages www.metoffice.gov.uk/research/library-and-archive/publications/factsheets Digital Library and Archive The Met Office Digital Library and Archive provides access to a growing collection of born digital content as well as copies of some our older publications and unique archive treasures. Just go to https://digital. nmla.metoffice.gov.uk/archive. -

Emissions and Effects Susan M
SMOKE PLUMES: EMISSIONS AND EFFECTS Susan M. O’Neill, Shawn Urbanski, Scott Goodrick, and Narasimhan K. Larkin moke can manifest itself as a towering plume rising against Smoke can affect public health, Sthe clear blue sky—or as a vast transportation safety, and the health swath of thick haze, with fingers that settle into valleys overnight. It and well-being of firefighters. comes in many forms and colors, from fluffy and white to thick and black. Smoke plumes can rise high 1). Overall, dry air is made up of 78 affect visibility, degrading vistas and into the atmosphere and travel percent nitrogen (N2), 21 percent creating transportation hazards. great distances across oceans and oxygen (O2), and about 1 percent Smoke combined with high humid continents. Or smoke can remain trace gases (about 0.9 percent ity can produce whiteout conditions close to the ground and follow fine- argon (Ar) and 0.1 percent other known as superfog (Achtemaier scale topographical features. trace gases). Water vapor in the 2002). air ranges from almost nothing to Along the way, the gases and par 5 percent. Yet the trace amount Wildland Fire Emissions ticles in the plumes react physically of smoke in the air can have sig If fire were 100-percent efficient, and chemically, creating additional nificant impacts, such as making the only products released would particulate matter and gases such the air smell bad; limiting vis be carbon dioxide, water vapor, as ozone (O3). If atmospheric water ibility; and affecting the health of and heat. However, the combus content is high, smoke plumes can vegetation and animals, including tion of wildland fuels is never also create “superfog” (Achtemeier humans. -

2A.1 FOG and THUNDERSTORM FORECASTING in MELBOURNE, AUSTRALIA Harvey Stern* Bureau of Meteorology, Melbourne, Vic., Australia
2A.1 FOG AND THUNDERSTORM FORECASTING IN MELBOURNE, AUSTRALIA Harvey Stern* Bureau of Meteorology, Melbourne, Vic., Australia 1. INTRODUCTION Although a lift in the CSI did not occur in every single instance when the verification data was analysed with A twelve-month "real-time" trial of a methodology all lead times taken separately, a lift occurred in most utilised to generate Day-1 to Day-7 forecasts, by instances. The exceptions were in the cases of Day-1 mechanically integrating judgmental (human) and and Day-2 forecasts of fog, where the CSIs were automated predictions, was conducted between 20 substantially below corresponding CSIs for the human August 2005 and 19 August 2006. After 365 days, the (official) forecasts. trial revealed that, overall, the various components (rainfall amount, sensible weather, minimum These forecasts are worthy of comment. The inability temperature, and maximum temperature) of (of the combining process) to improve on the Day-1 Melbourne forecasts so generated explained 41.3% and Day-2 official forecasts of fog may very well be a variance of the weather, 7.9% more variance than the consequence of the effort that the forecasting 33.4% variance explained by the human (official) personnel of the Victorian Regional Office (and others) forecasts alone (Stern, 2007a, 2007b). have invested over the years into short term fog and low cloud forecasting at Melbourne Airport (Goodhead, The trial continues and the purpose of the current 1978; Keith, 1978; Stern and Parkyn, 1998, 1999, paper is to report on its performance at predicting fog 2000, 2001; Newham, 2004, Weymouth et al, 2007; and thunderstorms between August 2005 and June Newham et al, 2007), most recently using a Bayesian 2007, a period of almost two years. -

The Nature of Lightning Fires, by E. V
Proceedings: 7th Tall Timbers Fire Ecology Conference 1967 The Nature of Lightning Fires E. V. KOMAREK, SR. Tall Timbers Research Station, Tallahassee, Florida THE PREVALENCE and behavior of lightning fires are of interest to those of us who study the mosaic of plants and animals and attempt to interpret the ecological conditions existing before changes made by man. We at Tall Timbers are particularly interested in those natural processes and principles that underlie the occurrence, abundance, and welfare of the plants and animals that surround us. We are vitally concerned with the ecology of man and his environment. Lightning, and lightning fires assumed a position of great impact on ecosystems before man came to this continent some 20,000 years ago, more or less. As I have discussed many phases of this "fire mosaic" in several previous papers (1962, 1963, 1964, 1965, 1966), let me simply state the obvious: Man did not invent fire or forest fires. They were a part of the natural environment long before the coming of man. My personal interest as a fire ecologist is to develop an under standing of the many ramifications of fire in nature; its effects on the habitat and on the plants and animals themselves as well. At the same time, however, I wish to point out that as an ecologist I am all too aware that man himself is a creature of his environment -his fire environment if you will. Thus, if man is to be successful in this environment with its great potentiality for fires he must understand the processes that control such an environment. -

Quantifying Fog Contributions to Water Balance in a Coastal California Watershed
Received: 27 February 2017 Accepted: 11 August 2017 DOI: 10.1002/hyp.11312 RESEARCH ARTICLE How much does dry-season fog matter? Quantifying fog contributions to water balance in a coastal California watershed Michaella Chung1 Alexis Dufour2 Rebecca Pluche2 Sally Thompson1 1Department of Civil and Environmental Engineering, University of California, Berkeley, Abstract Davis Hall, Berkeley,CA 94720, USA The seasonally-dry climate of Northern California imposes significant water stress on ecosys- 2San Francisco Public Utilities Commission, 525 Golden Gate Avenue, San Francisco, CA tems and water resources during the dry summer months. Frequently during summer, the only 94102, USA water inputs occur as non-rainfall water, in the form of fog and dew. However, due to spa- Correspondence tially heterogeneous fog interaction within a watershed, estimating fog water fluxes to under- Michaella Chung, Department of Civil and stand watershed-scale hydrologic effects remains challenging. In this study, we characterized Environmental Engineering, University of California, Berkeley,Davis Hall, Berkeley,CA the role of coastal fog, a dominant feature of Northern Californian coastal ecosystems, in a 94720, USA. San Francisco Peninsula watershed. To monitor fog occurrence, intensity, and spatial extent, Email: [email protected] we focused on the mechanisms through which fog can affect the water balance: throughfall following canopy interception of fog, soil moisture, streamflow, and meteorological variables. A stratified sampling design was used to capture the watershed's spatial heterogeneities in rela- tion to fog events. We developed a novel spatial averaging scheme to upscale local observations of throughfall inputs and evapotranspiration suppression and make watershed-scale estimates of fog water fluxes. -

PHAK Chapter 12 Weather Theory
Chapter 12 Weather Theory Introduction Weather is an important factor that influences aircraft performance and flying safety. It is the state of the atmosphere at a given time and place with respect to variables, such as temperature (heat or cold), moisture (wetness or dryness), wind velocity (calm or storm), visibility (clearness or cloudiness), and barometric pressure (high or low). The term “weather” can also apply to adverse or destructive atmospheric conditions, such as high winds. This chapter explains basic weather theory and offers pilots background knowledge of weather principles. It is designed to help them gain a good understanding of how weather affects daily flying activities. Understanding the theories behind weather helps a pilot make sound weather decisions based on the reports and forecasts obtained from a Flight Service Station (FSS) weather specialist and other aviation weather services. Be it a local flight or a long cross-country flight, decisions based on weather can dramatically affect the safety of the flight. 12-1 Atmosphere The atmosphere is a blanket of air made up of a mixture of 1% gases that surrounds the Earth and reaches almost 350 miles from the surface of the Earth. This mixture is in constant motion. If the atmosphere were visible, it might look like 2211%% an ocean with swirls and eddies, rising and falling air, and Oxygen waves that travel for great distances. Life on Earth is supported by the atmosphere, solar energy, 77 and the planet’s magnetic fields. The atmosphere absorbs 88%% energy from the sun, recycles water and other chemicals, and Nitrogen works with the electrical and magnetic forces to provide a moderate climate. -

Weather Symbol Full Chart
CLOUD Code Code Code SKY mph knots ABBREVIATION cH High Cloud Description cM Middle Cloud Description cL Low Cloud Description Nh N COVERAGE ff Cu of fair weather with little vertical development Filaments of Ci, or “mares tails,” scattered Thin As (most of cloud layer semi-transparent) No clouds Calm Calm Symbolic Station Model and not increasing and seemingly flattened 0 St or Fs = Stratus or 1 1 1 Fractostratus Cu of considerable development, generally Dense Ci and patches or twisted sheaves, Thick As, greater part sufficiently dense to Less than one-tenth 1 - 2 1 - 2 usually not increasing, sometimes like remains towering with or without other Cu or Sc bases or one-tenth Ci = Cirrus hide sun (or moon), or Ns 1 2 of Cb; or towers or tufts 2 2 all at the same level Two-tenths or Cb with tops lacking clear cut outlines but 3 - 8 3 - 7 Dense Ci, often anvil-shaped, derived from Thin Ac, mostly semi-transparent; cloud elements three tenths ff Cs = Cirrus distinctly not cirriform or anvil-shaped, or associated with Cb not changing much and at a single level 2 H 3 3 3 with or without Cu, Sc or St C Four-tenths 9 - 14 8 - 12 Cc = Cirrocumulus Ci, often hook-shaped,gradually spreading Thin Ac in patches; cloud elements continually Sc formed by the spreading out of Cu; Cu 3 dd 4 over the sky and usually thickening as a whole 4 changing and/or occurring at more than one level 4 often present also T T CM Five-tenths Ac = Altocumulus Ci and Cs, often in converging bands, or Cs alone; 15 - 20 13 - 17 PPP Thin Ac in bands or in a layer gradually