MONTE Python for Deep Space Navigation
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Elements of Astronomy and Cosmology Outline 1
ELEMENTS OF ASTRONOMY AND COSMOLOGY OUTLINE 1. The Solar System The Four Inner Planets The Asteroid Belt The Giant Planets The Kuiper Belt 2. The Milky Way Galaxy Neighborhood of the Solar System Exoplanets Star Terminology 3. The Early Universe Twentieth Century Progress Recent Progress 4. Observation Telescopes Ground-Based Telescopes Space-Based Telescopes Exploration of Space 1 – The Solar System The Solar System - 4.6 billion years old - Planet formation lasted 100s millions years - Four rocky planets (Mercury Venus, Earth and Mars) - Four gas giants (Jupiter, Saturn, Uranus and Neptune) Figure 2-2: Schematics of the Solar System The Solar System - Asteroid belt (meteorites) - Kuiper belt (comets) Figure 2-3: Circular orbits of the planets in the solar system The Sun - Contains mostly hydrogen and helium plasma - Sustained nuclear fusion - Temperatures ~ 15 million K - Elements up to Fe form - Is some 5 billion years old - Will last another 5 billion years Figure 2-4: Photo of the sun showing highly textured plasma, dark sunspots, bright active regions, coronal mass ejections at the surface and the sun’s atmosphere. The Sun - Dynamo effect - Magnetic storms - 11-year cycle - Solar wind (energetic protons) Figure 2-5: Close up of dark spots on the sun surface Probe Sent to Observe the Sun - Distance Sun-Earth = 1 AU - 1 AU = 150 million km - Light from the Sun takes 8 minutes to reach Earth - The solar wind takes 4 days to reach Earth Figure 5-11: Space probe used to monitor the sun Venus - Brightest planet at night - 0.7 AU from the -

Space Sector Brochure
SPACE SPACE REVOLUTIONIZING THE WAY TO SPACE SPACECRAFT TECHNOLOGIES PROPULSION Moog provides components and subsystems for cold gas, chemical, and electric Moog is a proven leader in components, subsystems, and systems propulsion and designs, develops, and manufactures complete chemical propulsion for spacecraft of all sizes, from smallsats to GEO spacecraft. systems, including tanks, to accelerate the spacecraft for orbit-insertion, station Moog has been successfully providing spacecraft controls, in- keeping, or attitude control. Moog makes thrusters from <1N to 500N to support the space propulsion, and major subsystems for science, military, propulsion requirements for small to large spacecraft. and commercial operations for more than 60 years. AVIONICS Moog is a proven provider of high performance and reliable space-rated avionics hardware and software for command and data handling, power distribution, payload processing, memory, GPS receivers, motor controllers, and onboard computing. POWER SYSTEMS Moog leverages its proven spacecraft avionics and high-power control systems to supply hardware for telemetry, as well as solar array and battery power management and switching. Applications include bus line power to valves, motors, torque rods, and other end effectors. Moog has developed products for Power Management and Distribution (PMAD) Systems, such as high power DC converters, switching, and power stabilization. MECHANISMS Moog has produced spacecraft motion control products for more than 50 years, dating back to the historic Apollo and Pioneer programs. Today, we offer rotary, linear, and specialized mechanisms for spacecraft motion control needs. Moog is a world-class manufacturer of solar array drives, propulsion positioning gimbals, electric propulsion gimbals, antenna positioner mechanisms, docking and release mechanisms, and specialty payload positioners. -

Voyager 1 Encounter with the Saturnian System Author(S): E
Voyager 1 Encounter with the Saturnian System Author(s): E. C. Stone and E. D. Miner Source: Science, New Series, Vol. 212, No. 4491 (Apr. 10, 1981), pp. 159-163 Published by: American Association for the Advancement of Science Stable URL: http://www.jstor.org/stable/1685660 . Accessed: 04/02/2014 18:59 Your use of the JSTOR archive indicates your acceptance of the Terms & Conditions of Use, available at . http://www.jstor.org/page/info/about/policies/terms.jsp . JSTOR is a not-for-profit service that helps scholars, researchers, and students discover, use, and build upon a wide range of content in a trusted digital archive. We use information technology and tools to increase productivity and facilitate new forms of scholarship. For more information about JSTOR, please contact [email protected]. American Association for the Advancement of Science is collaborating with JSTOR to digitize, preserve and extend access to Science. http://www.jstor.org This content downloaded from 131.215.71.79 on Tue, 4 Feb 2014 18:59:21 PM All use subject to JSTOR Terms and Conditions was complicated by several factors. Sat- urn's greater distance necessitated a fac- tor of 3 reduction in the rate of data transmission (44,800 bits per second at Saturn compared to 115,200 bits per sec- Reports ond at Jupiter). Furthermore, Saturn's satellites and rings provided twice as many objects to be studied at Saturn as at Jupiter, and the close approaches to Voyager 1 Encounter with the Saturnian System these objects all occurred within a 24- hour period, compared to nearly 72 Abstract. -

In Situ Exploration of the Giant Planets Olivier Mousis, David H
In situ Exploration of the Giant Planets Olivier Mousis, David H. Atkinson, Richard Ambrosi, Sushil Atreya, Don Banfield, Stas Barabash, Michel Blanc, T. Cavalié, Athena Coustenis, Magali Deleuil, et al. To cite this version: Olivier Mousis, David H. Atkinson, Richard Ambrosi, Sushil Atreya, Don Banfield, et al.. In situ Exploration of the Giant Planets. 2019. hal-02282409 HAL Id: hal-02282409 https://hal.archives-ouvertes.fr/hal-02282409 Submitted on 2 Jun 2020 HAL is a multi-disciplinary open access L’archive ouverte pluridisciplinaire HAL, est archive for the deposit and dissemination of sci- destinée au dépôt et à la diffusion de documents entific research documents, whether they are pub- scientifiques de niveau recherche, publiés ou non, lished or not. The documents may come from émanant des établissements d’enseignement et de teaching and research institutions in France or recherche français ou étrangers, des laboratoires abroad, or from public or private research centers. publics ou privés. In Situ Exploration of the Giant Planets A White Paper Submitted to ESA’s Voyage 2050 Call arXiv:1908.00917v1 [astro-ph.EP] 31 Jul 2019 Olivier Mousis Contact Person: Aix Marseille Université, CNRS, LAM, Marseille, France ([email protected]) July 31, 2019 WHITE PAPER RESPONSE TO ESA CALL FOR VOYAGE 2050 SCIENCE THEME In Situ Exploration of the Giant Planets Abstract Remote sensing observations suffer significant limitations when used to study the bulk atmospheric composition of the giant planets of our solar system. This impacts our knowledge of the formation of these planets and the physics of their atmospheres. A remarkable example of the superiority of in situ probe measurements was illustrated by the exploration of Jupiter, where key measurements such as the determination of the noble gases’ abundances and the precise measurement of the helium mixing ratio were only made available through in situ measurements by the Galileo probe. -

Celebrating 40 Years of Voyager Wonders Mission Veterans Recall the Dedication of the Team; Rock Concert Looks Back Four Decades
SEPTEMBER Jet Propulsion 2017 Laboratory VOLUME 47 NUMBER 9 Celebrating 40 years of Voyager wonders Mission veterans recall the dedication of the team; rock concert looks back four decades By Mark Whalen JPL’s iconic explorers, the twin Voyag- ers, continue on their journey at the edge of the solar system started 40 years ago. JPL celebrated Voyager in late August with a series of events befitting one of the most accomplished and revered robotic space missions of all time. On Friday, Aug. 25, Lab Director Mi- chael Watkins welcomed JPLers, Voyager veterans and political representatives to a commemoration on the Mall. Voyager has been not only a great voy- Josh Krohn / JPL Photo Lab From left: Voyager Project Manager Suzy Dodd, Project Scientist Ed Stone, Communications and Education Director age of exploration, but one of the great- Blaine Baggett, JPL Chief Engineer Chris Jones and John Casani, Voyager’s first project manager. est engineering feats of all time, Watkins noted. “I hope all of us here today feel a told the commitment was for four years. we had ever been,” said Casani. “So it part of the Voyager project,” he said. Hardly, as it turns out. was quite a challenge.” Congresswoman Judy Chu, elected in “There was no way to know whether a But JPLers were up to it. 2009 to represent the 27th district that spacecraft — never mind two — could go The panel chat was interspersed with includes JPL and Caltech, presented a for 40 years,” said Stone, Voyager’s only video clips featuring historic interviews, Congressional certificate of recognition to project scientist since 1972, who still re- launch footage, and Voyager team mem- the Laboratory. -
Revisiting Decades-Old Voyager 2 Data, Scientists Find One More Secret About Uranus 26 March 2020, by Miles Hatfield
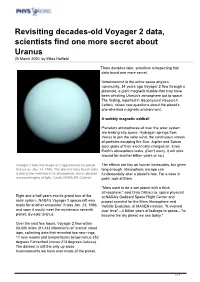
Revisiting decades-old Voyager 2 data, scientists find one more secret about Uranus 26 March 2020, by Miles Hatfield Three decades later, scientists reinspecting that data found one more secret. Unbeknownst to the entire space physics community, 34 years ago Voyager 2 flew through a plasmoid, a giant magnetic bubble that may have been whisking Uranus's atmosphere out to space. The finding, reported in Geophysical Research Letters, raises new questions about the planet's one-of-a-kind magnetic environment. A wobbly magnetic oddball Planetary atmospheres all over the solar system are leaking into space. Hydrogen springs from Venus to join the solar wind, the continuous stream of particles escaping the Sun. Jupiter and Saturn eject globs of their electrically-charged air. Even Earth's atmosphere leaks. (Don't worry, it will stick around for another billion years or so.) Voyager 2 took this image as it approached the planet The effects are tiny on human timescales, but given Uranus on Jan. 14, 1986. The planet’s hazy bluish color long enough, atmospheric escape can is due to the methane in its atmosphere, which absorbs fundamentally alter a planet's fate. For a case in red wavelengths of light. Credit: NASA/JPL-Caltech point, look at Mars. "Mars used to be a wet planet with a thick atmosphere," said Gina DiBraccio, space physicist Eight and a half years into its grand tour of the at NASA's Goddard Space Flight Center and solar system, NASA's Voyager 2 spacecraft was project scientist for the Mars Atmosphere and ready for another encounter. -

Evaluation Using SOHO SWAN and MAVEN EUVM Lyman Measurements
View metadata, citation and similar papers at core.ac.uk brought to you by CORE provided by Archive Ouverte en Sciences de l'Information et de la Communication Multiple Scattering Effects in the Interplanetary Medium: Evaluation Using SOHO SWAN and MAVEN EUVM Lyman α Measurements Eric Quémerais, Edward Thiemann, Martin Snow, Stéphane Ferron, Walter Schmidt To cite this version: Eric Quémerais, Edward Thiemann, Martin Snow, Stéphane Ferron, Walter Schmidt. Multiple Scat- tering Effects in the Interplanetary Medium: Evaluation Using SOHO SWAN and MAVENEUVM Lyman α Measurements. Journal of Geophysical Research Space Physics, American Geophysical Union/Wiley, 2019, 124 (6), pp.3949-3960. 10.1029/2019JA026674. insu-02151127 HAL Id: insu-02151127 https://hal-insu.archives-ouvertes.fr/insu-02151127 Submitted on 11 Sep 2019 HAL is a multi-disciplinary open access L’archive ouverte pluridisciplinaire HAL, est archive for the deposit and dissemination of sci- destinée au dépôt et à la diffusion de documents entific research documents, whether they are pub- scientifiques de niveau recherche, publiés ou non, lished or not. The documents may come from émanant des établissements d’enseignement et de teaching and research institutions in France or recherche français ou étrangers, des laboratoires abroad, or from public or private research centers. publics ou privés. RESEARCH ARTICLE Multiple Scattering Effects in the Interplanetary 10.1029/2019JA026674 Medium: Evaluation Using SOHO SWAN Key Points: and MAVEN EUVM Lyman • We present a new method to evaluate the solar flux toward any object in the Measurements solar system • We evaluate the contribution of 1 2 2 3 multiple scattering to the Eric Quémerais , Edward Thiemann , Martin Snow , Stéphane Ferron , interplanetary ultraviolet emission and Walter Schmidt4 1LATMOS-OVSQ, Université Versailles Saint-Quentin, Guyancourt, France, 2Laboratory for Atmospheric and Space Correspondence to: Physics, University of Colorado Boulder, Boulder, CO, USA, 3ACRI-ST, Guyancourt, France, 4Finnish Meteorological E. -

The Cassini-Huygens Mission Overview
SpaceOps 2006 Conference AIAA 2006-5502 The Cassini-Huygens Mission Overview N. Vandermey and B. G. Paczkowski Jet Propulsion Laboratory, California Institute of Technology, Pasadena, CA 91109 The Cassini-Huygens Program is an international science mission to the Saturnian system. Three space agencies and seventeen nations contributed to building the Cassini spacecraft and Huygens probe. The Cassini orbiter is managed and operated by NASA's Jet Propulsion Laboratory. The Huygens probe was built and operated by the European Space Agency. The mission design for Cassini-Huygens calls for a four-year orbital survey of Saturn, its rings, magnetosphere, and satellites, and the descent into Titan’s atmosphere of the Huygens probe. The Cassini orbiter tour consists of 76 orbits around Saturn with 45 close Titan flybys and 8 targeted icy satellite flybys. The Cassini orbiter spacecraft carries twelve scientific instruments that are performing a wide range of observations on a multitude of designated targets. The Huygens probe carried six additional instruments that provided in-situ sampling of the atmosphere and surface of Titan. The multi-national nature of this mission poses significant challenges in the area of flight operations. This paper will provide an overview of the mission, spacecraft, organization and flight operations environment used for the Cassini-Huygens Mission. It will address the operational complexities of the spacecraft and the science instruments and the approach used by Cassini- Huygens to address these issues. I. The Mission Saturn has fascinated observers for over 300 years. The only planet whose rings were visible from Earth with primitive telescopes, it was not until the age of robotic spacecraft that questions about the Saturnian system’s composition could be answered. -

Mars Reconnaissance Orbiter's High Resolution Imaging Science
JOURNAL OF GEOPHYSICAL RESEARCH, VOL. 112, E05S02, doi:10.1029/2005JE002605, 2007 Click Here for Full Article Mars Reconnaissance Orbiter’s High Resolution Imaging Science Experiment (HiRISE) Alfred S. McEwen,1 Eric M. Eliason,1 James W. Bergstrom,2 Nathan T. Bridges,3 Candice J. Hansen,3 W. Alan Delamere,4 John A. Grant,5 Virginia C. Gulick,6 Kenneth E. Herkenhoff,7 Laszlo Keszthelyi,7 Randolph L. Kirk,7 Michael T. Mellon,8 Steven W. Squyres,9 Nicolas Thomas,10 and Catherine M. Weitz,11 Received 9 October 2005; revised 22 May 2006; accepted 5 June 2006; published 17 May 2007. [1] The HiRISE camera features a 0.5 m diameter primary mirror, 12 m effective focal length, and a focal plane system that can acquire images containing up to 28 Gb (gigabits) of data in as little as 6 seconds. HiRISE will provide detailed images (0.25 to 1.3 m/pixel) covering 1% of the Martian surface during the 2-year Primary Science Phase (PSP) beginning November 2006. Most images will include color data covering 20% of the potential field of view. A top priority is to acquire 1000 stereo pairs and apply precision geometric corrections to enable topographic measurements to better than 25 cm vertical precision. We expect to return more than 12 Tb of HiRISE data during the 2-year PSP, and use pixel binning, conversion from 14 to 8 bit values, and a lossless compression system to increase coverage. HiRISE images are acquired via 14 CCD detectors, each with 2 output channels, and with multiple choices for pixel binning and number of Time Delay and Integration lines. -

Voyage to Jupiter. INSTITUTION National Aeronautics and Space Administration, Washington, DC
DOCUMENT RESUME ED 312 131 SE 050 900 AUTHOR Morrison, David; Samz, Jane TITLE Voyage to Jupiter. INSTITUTION National Aeronautics and Space Administration, Washington, DC. Scientific and Technical Information Branch. REPORT NO NASA-SP-439 PUB DATE 80 NOTE 208p.; Colored photographs and drawings may not reproduce well. AVAILABLE FROMSuperintendent of Documents, U.S. Government Printing Office, Washington, DC 20402 ($9.00). PUB TYPE Reports - Descriptive (141) EDRS PRICE MF01/PC09 Plus Postage. DESCRIPTORS Aerospace Technology; *Astronomy; Satellites (Aerospace); Science Materials; *Science Programs; *Scientific Research; Scientists; *Space Exploration; *Space Sciences IDENTIFIERS *Jupiter; National Aeronautics and Space Administration; *Voyager Mission ABSTRACT This publication illustrates the features of Jupiter and its family of satellites pictured by the Pioneer and the Voyager missions. Chapters included are:(1) "The Jovian System" (describing the history of astronomy);(2) "Pioneers to Jupiter" (outlining the Pioneer Mission); (3) "The Voyager Mission"; (4) "Science and Scientsts" (listing 11 science investigations and the scientists in the Voyager Mission);.(5) "The Voyage to Jupiter--Cetting There" (describing the launch and encounter phase);(6) 'The First Encounter" (showing pictures of Io and Callisto); (7) "The Second Encounter: More Surprises from the 'Land' of the Giant" (including pictures of Ganymede and Europa); (8) "Jupiter--King of the Planets" (describing the weather, magnetosphere, and rings of Jupiter); (9) "Four New Worlds" (discussing the nature of the four satellites); and (10) "Return to Jupiter" (providing future plans for Jupiter exploration). Pictorial maps of the Galilean satellites, a list of Voyager science teams, and a list of the Voyager management team are appended. Eight technical and 12 non-technical references are provided as additional readings. -

Phoenix Rises Smith of the University of Arizona, the Mission’S Principal Investigator
Jet SEPTEMBER Propulsion 2007 Laboratory VOLUME 37 NUMBER 9 The key activities in the first few weeks of flight will include inspections of sci- ence instruments, radar and the communication system that will be used during and after the landing. Goldstein said that in-flight calibration tests of Phoenix’s Kennedy Space Center instruments would be conducted about every week or so during the cruise phase of the journey. The first instrument to undergo in-flight checkout was the Thermal and Evolved- Gas Analyzer, on Aug. 20, followed by calibration of Phoenix’s robotic arm tem- perature scoop near the end of the month. To be monitored in September are the robotic arm’s camera and the Microscopy, Electrochemistry and Conductivity Analyzer, as well as the calibration of the Sur- face Stereoscopic Imager’s camera. The only Phoenix instrument not requiring checkout during the early cruise phase is the Mars Descent Imager, Guinn said, which won’t undergo such scrutiny until Feb. 25. The camera will take a downward-looking picture during the final moments before Phoenix lands on Mars. Meantime, an overall operations readiness test is scheduled for the first week of October at Phoenix’s operations center at the University of Arizona in Tucson, which maintains a testbed facility to help iron out potential issues discovered in testing. Guinn said this capability gives him and the team confidence that the journey will proceed trouble-free. Phoenix will be the first mission to touch water-ice on Mars. Its robotic arm will dig into an icy layer believed to lie just beneath the surface. -

Final EIS for the Mars Science Laboratory Mission
Volume 1 National Aeronautics and Executive Summary and Space Administration Chapters 1 through 8 November 2006 Final Environmental Impact Statement for the Mars Science Laboratory Mission Cover graphic: artist’s concept of the Mars Science Laboratory Rover operating on the surface of Mars. NASA/JPL FINAL ENVIRONMENTAL IMPACT STATEMENT FOR THE MARS SCIENCE LABORATORY MISSION VOLUME 1 EXECUTIVE SUMMARY AND CHAPTERS 1 THROUGH 8 Science Mission Directorate National Aeronautics and Space Administration Washington, DC 20546 November 2006 This page intentionally left blank. ii Final Environmental Impact Statement for the Mars Science Laboratory Mission FINAL ENVIRONMENTAL IMPACT STATEMENT FOR THE MARS SCIENCE LABORATORY MISSION ABSTRACT LEAD AGENCY: National Aeronautics and Space Administration Washington, DC 20546 COOPERATING AGENCY: U.S. Department of Energy Washington, DC 20585 POINT OF CONTACT Mark R. Dahl FOR INFORMATION: Planetary Science Division Science Mission Directorate NASA Headquarters Washington, DC 20546 (202) 358-4800 DATE: November 2006 This Final Environmental Impact Statement (FEIS) has been prepared by the National Aeronautics and Space Administration (NASA) in accordance with the National Environmental Policy Act of 1969, as amended, (NEPA) to assist in the decision-making process for the Mars Science Laboratory (MSL) mission. This Environmental Impact Statement (EIS) is a tiered document (Tier 2 EIS) under NASA’s Programmatic EIS for the Mars Exploration Program. The Proposed Action addressed in this FEIS is to continue preparations for and implement the MSL mission. The MSL spacecraft would be launched on an expendable launch vehicle during September – November 2009. The MSL spacecraft would then deliver a large, mobile science laboratory (rover) with advanced instrumentation to a scientifically interesting location on the surface of Mars in 2010.