Fingerprint Pre-Processing on ARM and DSP Platforms M
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
FAN53525 3.0A, 2.4Mhz, Digitally Programmable Tinybuck® Regulator
FAN53525 — 3.0 A, 2.4 MHz, June 2014 FAN53525 3.0A, 2.4MHz, Digitally Programmable TinyBuck® Regulator Digitally Programmable TinyBuck Digitally Features Description . Fixed-Frequency Operation: 2.4 MHz The FAN53525 is a step-down switching voltage regulator that delivers a digitally programmable output from an input . Best-in-Class Load Transient voltage supply of 2.5 V to 5.5 V. The output voltage is 2 . Continuous Output Current Capability: 3.0 A programmed through an I C interface capable of operating up to 3.4 MHz. 2.5 V to 5.5 V Input Voltage Range Using a proprietary architecture with synchronous . Digitally Programmable Output Voltage: rectification, the FAN53525 is capable of delivering 3.0 A - 0.600 V to 1.39375 V in 6.25 mV Steps continuous at over 80% efficiency, maintaining that efficiency at load currents as low as 10 mA. The regulator operates at Programmable Slew Rate for Voltage Transitions . a nominal fixed frequency of 2.4 MHz, which reduces the . I2C-Compatible Interface Up to 3.4 Mbps value of the external components to 330 nH for the output inductor and as low as 20 µF for the output capacitor. PFM Mode for High Efficiency in Light Load . Additional output capacitance can be added to improve . Quiescent Current in PFM Mode: 50 µA (Typical) regulation during load transients without affecting stability, allowing inductance up to 1.2 µH to be used. Input Under-Voltage Lockout (UVLO) ® At moderate and light loads, Pulse Frequency Modulation Regulator Thermal Shutdown and Overload Protection . (PFM) is used to operate in Power-Save Mode with a typical . -

An Emerging Architecture in Smart Phones
International Journal of Electronic Engineering and Computer Science Vol. 3, No. 2, 2018, pp. 29-38 http://www.aiscience.org/journal/ijeecs ARM Processor Architecture: An Emerging Architecture in Smart Phones Naseer Ahmad, Muhammad Waqas Boota * Department of Computer Science, Virtual University of Pakistan, Lahore, Pakistan Abstract ARM is a 32-bit RISC processor architecture. It is develop and licenses by British company ARM holdings. ARM holding does not manufacture and sell the CPU devices. ARM holding only licenses the processor architecture to interested parties. There are two main types of licences implementation licenses and architecture licenses. ARM processors have a unique combination of feature such as ARM core is very simple as compare to general purpose processors. ARM chip has several peripheral controller, a digital signal processor and ARM core. ARM processor consumes less power but provide the high performance. Now a day, ARM Cortex series is very popular in Smartphone devices. We will also see the important characteristics of cortex series. We discuss the ARM processor and system on a chip (SOC) which includes the Qualcomm, Snapdragon, nVidia Tegra, and Apple system on chips. In this paper, we discuss the features of ARM processor and Intel atom processor and see which processor is best. Finally, we will discuss the future of ARM processor in Smartphone devices. Keywords RISC, ISA, ARM Core, System on a Chip (SoC) Received: May 6, 2018 / Accepted: June 15, 2018 / Published online: July 26, 2018 @ 2018 The Authors. Published by American Institute of Science. This Open Access article is under the CC BY license. -
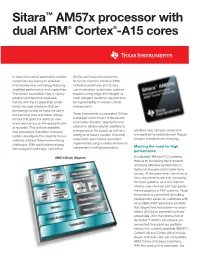
Sitara™ Am57x Processor with Dual ARM® Cortex®-A15 Cores
Sitara™ AM57x processor with dual ARM® Cortex®-A15 cores In today’s industrial automation market, (PLCs) and industrial computers consumers are seeing an evolution to human machine interface (HMI), that requires new technology featuring industrial peripherals and factory amplified performance and capabilities. communication, automation systems The factory automation floor is rapidly require cuttingedge technologies to advancing to become more user meet stringent customer requirements friendly with the incorporation of ele for high reliability in missioncritical ments like user interfaces that are environments. increasingly similar to those we use in our everyday lives and video compe Texas Instruments Incorporated (TI) has tencies that grant the ability to view a strategic commitment to the factory machines running on the opposite side automation industry, ranging from an of factories. This shift necessitates extensive, reliable solution portfolio to solutions very complex, expensive new processors that afford industrial a long product life supply as well as a and resistant to evolution even though system developers the capacity to suc strong localbased support. Industrial industry standards are changing. cessfully address these everevolving automation applications have been challenges. With applications ranging implemented using a variety of external Meeting the need for high from programmable logic controllers components making yesterday’s performance AM57x block diagram In industrial HMI and PLC systems, there is an increasing trend towards achieving x86level performance in fanless enclosures and smaller form factors. At the same time, communica tions requirements are ever increasing for these systems, as is the need for intuitive user interface and highperfor mance graphics in HMI systems. -

OMAP 3 Family of Multimedia Applications
OMAP™ 3 family of multimedia applications processors Revolutionizing entertainment and productivity Key features in wireless handheld commumications • Combines mobile entertainment and high-performance productivity applications. Product Bulletin • Integrates the advanced Superscalar ARM Cortex-A8 RISC core, enabling up to The OMAP™ 3 family of multimedia applications processors from Texas Instruments (TI) 3x gain in performance versus ARM11. introduces a new level of performance that enables laptop-like productivity and advanced • Designed in 45-nm (OMAP36x platform) entertainment in multimedia-enabled handsets. OMAP 3 devices support all levels of and 65-nm (OMAP34x platform) CMOS handsets, from the entry-level multimedia-enabled handsets to high-end Mobile Internet process technologies for less power Devices (MIDs). consumption and increased device performance. Entry-level Mid-level High-end • Includes integrated IVA hardware multimedia-enabled multimedia-enabled multimedia-enabled accelerators to enable multi-standard encode handsets handsets handsets decode up to HD resolution. OMAP3410 OMAP3420 OMAP3430/3440 • Available integrated image signal OMAP3610 OMAP3620 OMAP3630/3640 processor (ISP) enables faster, higher quality image capture, lower system cost TI’s OMAP 3 family of applications processors These devices can operate at a higher and lower power consumption. • Provides seamless connectivity to hard integrate the ARM Cortex-A8 superscalar frequency than previous-generation OMAP diskdrive (HDD) devices for mass storage. microprocessor -
Nomadik Application Processor Andrea Gallo Giancarlo Asnaghi ST Is #1 World-Wide Leader in Digital TV and Consumer Audio
Nomadik Application Processor Andrea Gallo Giancarlo Asnaghi ST is #1 world-wide leader in Digital TV and Consumer Audio MP3 Portable Digital Satellite Radio Set Top Box Player Digital Car Radio DVD Player MMDSP+ inside more than 200 million produced chips January 14, 2009 ST leader in mobile phone chips January 14, 2009 Nomadik Nomadik is based on this heritage providing: – Unrivalled multimedia performances – Very low power consumption – Scalable performances January 14, 2009 BestBest ApplicationApplication ProcessorProcessor 20042004 9 Lowest power consumption 9 Scalable performance 9 Video/Audio quality 9 Cost-effective Nominees: Intel XScale PXA260, NeoMagic MiMagic 6, Nvidia MQ-9000, STMicroelectronics Nomadik STn8800, Texas Instruments OMAP 1611 January 14, 2009 Nomadik Nomadik is a family of Application Processors – Distributed processing architecture ARM9 + multiple Smart Accelerators – Support of a wide range of OS and applications – Seamless integration in the OS through standard API drivers and MM framework January 14, 2009 roadmap ... January 14, 2009 Some Nomadik products on the market... January 14, 2009 STn8815 block diagram January 14, 2009 Nomadik : a true real time multiprocessor platform ARM926 SDRAM SRAM General (L1 + L2) Purpose •Unlimited Space (Level 2 •Limited Bandwidth Cache System for Video) DMA Master OS Memory Controller Peripherals multi-layer AHB bus RTOS RTOS Multi-thread (Scheduler FSM) NAND Flash MMDSP+ Video •Unlimited Space MMDSP+ Audio 66 MHz, 16-bit •“No” Bandwidth 133 MHz, 24-bit •Mass storage -

Mediatek Inc
01 May 2015 Asia Pacific/Taiwan Equity Research Semiconductor Devices MediaTek Inc. (2454.TW / 2454 TT) Rating NEUTRAL* Price (30 Apr 15, NT$) 395.00 RESULTS Target price (NT$) 405.00¹ Upside/downside (%) 2.5 Mkt cap (NT$ mn) 708,117 (US$ 23,121) 2Q lacks growth, but a high bar is set for 2H Enterprise value (NT$ mn) 544,619 ■ 1Q15 results in line with CS, but below street. 1Q15 sales were already Number of shares (mn) 1,792.70 Free float (%) 89.1 reported at NT$47.5 bn, -14.3% QoQ. Smartphone shipments were 85 mn 52-week price range 535.0 - 390.0 (30mn LTE), down from 95-100mn in 4Q14 due to seasonality and emerging ADTO - 6M (US$ mn) 101.0 market weakness. GMs met our 47.3% vs 46-48% guidance and OpM was also *Stock ratings are relative to the coverage universe in each analyst's or each team's respective sector. in line at 16.1% on cost controls. Lower non-op income kept EPS only in line ¹Target price is for 12 months. with our NT$4.62 and below street's NT$4.97. Research Analysts ■ 2Q15 guidance below, inventory elevated. Sales were guided -5% to +3% Randy Abrams, CFA QoQ, below CS/street's +9%/+18% QoQ on 3G price pressure and 4G mix 886 2 2715 6366 [email protected] skewed to the entry level. Margins are in line, with GMs at 45.5-47.5% and Nickie Yue OpM at 12.5-16.5%. Inventory is elevated, at 102 days and guided to stay 886 2 2715 6364 98-110 days in 2Q15, requiring 2H15 acceleration. -

OMAP-L137 C6000 DSP+ARM Processor
Product Sample & Technical Tools & Support & Folder Buy Documents Software Community OMAP-L137 www.ti.com SPRS563F –SEPTEMBER 2008–REVISED FEBRUARY 2013 OMAP-L137 Low-Power Applications Processor Check for Samples: OMAP-L137 1 OMAP-L137 Low-Power Applications Processor 1.1 Features 1234 • Highlights – 8K-Byte RAM (Vector Table) – Dual Core SoC – 64K-Byte ROM • 375/456-MHz ARM926EJ-S™ RISC MPU • C674x Instruction Set Features • 375/456-MHz C674x VLIW DSP – Superset of the C67x+™ and C64x+™ ISAs – TMS320C674x Fixed/Floating-Point VLIW – Up to 3648/2736 C674x MIPS/MFLOPS DSP Core – Byte-Addressable (8-/16-/32-/64-Bit Data) – Enhanced Direct-Memory-Access Controller – 8-Bit Overflow Protection 3 (EDMA3) – Bit-Field Extract, Set, Clear – 128K-Byte RAM Shared Memory – Normalization, Saturation, Bit-Counting – Two External Memory Interfaces – Compact 16-Bit Instructions – Three Configurable 16550 type UART • C674x Two Level Cache Memory Architecture Modules – 32K-Byte L1P Program RAM/Cache – LCD Controller – 32K-Byte L1D Data RAM/Cache – Two Serial Peripheral Interfaces (SPI) – 256K-Byte L2 Unified Mapped RAM/Cache – Multimedia Card (MMC)/Secure Digital (SD) – Flexible RAM/Cache Partition (L1 and L2) – Two Master/Slave Inter-Integrated Circuit • Enhanced Direct-Memory-Access Controller 3 – One Host-Port Interface (HPI) (EDMA3): – USB 1.1 OHCI (Host) With Integrated PHY – 2 Transfer Controllers (USB1) – 32 Independent DMA Channels • Applications – 8 Quick DMA Channels – Industrial Diagnostics – Programmable Transfer Burst Size – Test and measurement -

(12) Patent Application Publication (10) Pub. No.: US 2015/0254416 A1 Shih (43) Pub
US 20150254416A1 (19) United States (12) Patent Application Publication (10) Pub. No.: US 2015/0254416 A1 Shih (43) Pub. Date: Sep. 10, 2015 (54) METHOD AND SYSTEM FOR PROVIDING (52) U.S. Cl. MEDICAL ADVICE CPC .......... G06F 19/3425 (2013.01); G06F 19/322 (2013.01) (71) Applicant: ClickMedix, Gaithersburg, MD (US) (72) Inventor: Ting-Chih Shih, Rockville, MD (US) (57) ABSTRACT (73) Assignee: CLICKMEDIX, Gaithersburg, MD A method and system for providing medical services wherein (US) a server establishes a wireless connection with a mobile device or computer of a user. The mobile device or computer (21) Appl. No.: 14/199,559 has already been provided with an application for the entry of (22) Filed: Mar. 6, 2014 user information. The server receives encrypted user infor mation from the mobile device or computer, decrypts the user Publication Classification information, and forwards the user information to experts selected on the basis of the user information. The server (51) Int. Cl. collects responses from the experts, and provides expert G06F 9/00 (2006.01) advice to the user of the mobile device or computer. NTERNET SERVICE SERVER PROVIDER 25 Patent Application Publication Sep. 10, 2015 Sheet 1 of 10 US 2015/0254416 A1 S. OO L gy2 O ch : 2 > S 2 v 9 --- ---m-m- Patent Application Publication Sep. 10, 2015 Sheet 2 of 10 US 2015/0254416 A1 ZI IZ| -----———————? |------ OT Patent Application Publication Sep. 10, 2015 Sheet 3 of 10 US 2015/0254416 A1 dXB:LHB Patent Application Publication Sep. 10, 2015 Sheet 4 of 10 US 2015/0254416 A1 ——— ?II || | | || | |NOIIVWHOHNI Å ||GO?I Nodisva HITV3HLNBILVd ______.ISOH______ ~~~~}dno89v10BTES!| S183dXBHO| |~\~~~~|||| †7·314 || | | || | ZO? A | } }} | }{ | l Patent Application Publication US 2015/0254416 A1 ?euauss)| Patent Application Publication Sep. -

ARM Processor Architecture Embedded Systems with ARM Cortext-M Updated: Monday, February 5, 2018 a Little About ARM – the Company
Chapters 1 and 3 ARM Processor Architecture Embedded Systems with ARM Cortext-M Updated: Monday, February 5, 2018 A Little about ARM – The company • Originally Acorn RISC Machine (ARM) • Later Advanced RISC Machine • Then it became ARM Ltd owned by ARM Holdings (parent company) • In 2016 SoftBank bought ARM for $31 billion • ARM: • Develops the architecture and licenses it to other companies • Other companies design their own products that implement one of those architectures— including systems- on-chips (SoC) and systems-on-modules (SoM) that incorporate memory, interfaces, radios, etc. • It also designs cores that implement this instruction set and licenses these designs to a number of companies that incorporate those core designs into their own products. • ARM Processors • RISC based processors • In 2010 alone, 6.1 billion ARM-based processor, representing 95% of smartphones, 35% of digital televisions and set-top boxes and 10% of mobile computers • over 100 billion ARM processors produced as of 2017 • The most widely used instruction set architecture in terms of quantity produced https://en.wikipedia.org/wiki/ARM_architecture M R https://en.wikipedia.org/wiki/ARM_architecture ARM Family and Architecture CPU ARM FAMILY TREE CORTEX- CORTEX- CORTEX- ARM Cortex Processors • ARM Cortex-A family: • Applications processors • Support OS and high- performance applications • Such as Smartphones, Smart TV • ARM Cortex-R family: • Real-time processors with high performance and high reliability • Support real-time processing and mission-critical control • ARM Cortex-M family: • Microcontroller • Cost-sensitive, support SoC 6 CORTEX- • Cortex-M is a great trade-off between performance, cost, efficiency; used for IoT, various applications. -

Design of the Hardware Platform for the Flight Control System in an Unmanned Aerial Vehicle
Institutionen för systemteknik Department of Electrical Engineering Examensarbete Design of the Hardware Platform for the Flight Control System in an Unmanned Aerial Vehicle Examensarbete utfört i Elektroniksystem vid Tekniska högskolan i Linköping av Mårten Svanfeldt LiTH-ISY-EX--10/4366--SE Linköping 2010 Department of Electrical Engineering Linköpings tekniska högskola Linköpings universitet Linköpings universitet SE-581 83 Linköping, Sweden 581 83 Linköping Design of the Hardware Platform for the Flight Control System in an Unmanned Aerial Vehicle Examensarbete utfört i Elektroniksystem vid Tekniska högskolan i Linköping av Mårten Svanfeldt LiTH-ISY-EX--10/4366--SE Handledare: Jonas Lindqvist Inopia AB Kent Palmkvist ISY, Linköpings universitet Examinator: Kent Palmkvist ISY, Linköpings universitet Linköping, 3 September, 2010 Avdelning, Institution Datum Division, Department Date Division of Electronics Systems Department of Electrical Engineering 2010-09-03 Linköpings universitet SE-581 83 Linköping, Sweden Språk Rapporttyp ISBN Language Report category — Svenska/Swedish Licentiatavhandling ISRN Engelska/English Examensarbete LiTH-ISY-EX--10/4366--SE C-uppsats Serietitel och serienummer ISSN D-uppsats Title of series, numbering — Övrig rapport URL för elektronisk version http://urn.kb.se/resolve?urn=urn:nbn:se:liu:diva-58985 Titel Design av hårdvaruplatformen för flygkontrollsystemet i en obemannad flygande Title farkost Design of the Hardware Platform for the Flight Control System in an Unmanned Aerial Vehicle Författare Mårten Svanfeldt Author Sammanfattning Abstract This thesis will present work done to develop the hardware of a flight control sys- tem (FCS) for an unmanned aerial vehicle (UAV). While as important as mechan- ical construction and control algorithms, the elecronics hardware have received far less attention in published works. -

Cisco 1100 Series Software Configuration Guide, Cisco IOS XE Fuji 16.7.X
Cisco 1100 Series Software Configuration Guide, Cisco IOS XE Fuji 16.7.x First Published: 2017-03-06 Last Modified: 2017-10-10 Americas Headquarters Cisco Systems, Inc. 170 West Tasman Drive San Jose, CA 95134-1706 USA http://www.cisco.com Tel: 408 526-4000 800 553-NETS (6387) Fax: 408 527-0883 © 2017 Cisco Systems, Inc. All rights reserved. CONTENTS CHAPTER 1 Overview 1 Introduction to Cisco 1000 Series Integrated Services Routers 1 Sections in this Document 1 CHAPTER 2 Using Cisco IOS XE Software 5 Accessing the CLI Using a Router Console 5 Accessing the CLI Using a Directly-Connected Console 5 Connecting to the Console Port 5 Use the Console Interface 6 Using SSH to Access Console 6 Accessing the CLI from a Remote Console Using Telnet 7 Preparing to Connect to the Router Console Using Telnet 7 Using Telnet to Access a Console Interface 8 Accessing the CLI from a Remote Console Using a Modem 8 Accessing the CLI from a Micro USB Serial Console Port 9 Keyboard Shortcuts 9 Using the History Buffer to Recall Commands 9 Understanding Command Modes 10 Understanding Diagnostic Mode 11 Getting Help 12 Using the no and default Forms of Commands 16 Using the factory reset Commands 16 Saving Configuration Changes 16 Managing Configuration Files 17 Filtering Output from the show and more Commands 17 Powering Off a Router 18 Cisco 1100 Series Software Configuration Guide, Cisco IOS XE Fuji 16.7.x iii Contents Finding Support Information for Platforms and Cisco Software Images 18 Using Cisco Feature Navigator 18 Using Software Advisor 18 Using Software -
ARM® Cortex-A8 up To
EPOS/PDT Solutions base on TI ARM Nov 2012 TI ARM® investment and innovation 1st single-chip Introduce digital baseband - DaVinci™ TMS570 Stellaris ARM DSP/ARM MCU Fixed/ MCU Lead Cortex- multi-core Floating- Licensee A15 Point on based Two ARM ® TI Introduced DaVinci™ Stellaris® Stellaris ARM9 Cortex- silicon TI processors for Cortex-R4 SoC Acquires Fury DustDevil M4 OMAP™ Licenses digital video cores Luminary Class TI Class ™ OMAP 5 first – ARM9™-based SoCs for OMAP Micro ARM automotive Licenses OMAP-L138 core *TI first licensee for ARM ARM Cortex™- A8 Cortex-A9 1993 1995 2002 2005 2006 2007 2008 2009 2010 2011 1st multi-core Stellaris® applications Tempest TI Licenses ™ Class Cortex-A15 processor, Stellaris® DaVinci TI ARM9-based Sandstorm announces 1st ARM Class 1st R4F-based 31 new Introduce ARM OMAP™ Cortex-A8 floating-point, ® Newest DaVinci Stellaris Cortex-A9 OMAP1510 based silicon dual-core auto and based silicon solution for MCU ™ ARM-based ™ OMAP flexible, OMAP OMAP 3 MPUs OMAP 4 TI HD video TMS570F Licenses MCU Cortex-A7 TI has shipped over 6 billion ARM-based products and continues to invest in a large portfolio of scalable platforms from $1 to >1GHz * TI licensed in July 2003, but publicly announced Oct 2005. 2 Hero Sitara ARM MPUs Available Today AM18x AM335x AM35x AM37x Core ARM9 up to 456MHz Cortex-A8 up to 720MHz Cortex-A8 up to 600MHz Cortex-A8 up to 1GHz DMIPs Up to 410 Up to 1440 Up to 1200 Up to 2000 Graphics N/A SGX530 SGX530 SGX530 Memory LPDDR1/DDR2 LPDDR1/DDR2/DDR3 LPDDR1/DDR2 LPDDR1 OS Linux/WinCE/StarerWare Linux/WinCE/Android/ Linux/WinCE/Android Linux/WinCE/Android StarterWare LCD Controller, SATA, LCD Controller, Display Subsystem, Display Subsystem, Key Video In/Out, 10/100 10/100/1000 EMAC, CAN, Video In/out, 10/100 Video In/out, PoP Features EMAC, USB w/PHY USB w/PHY EMAC, CAN packaging, USB, Lowest USB w/PHY power PND, EPOS, Connected Apps Smart Meter, WiFi Router Home, Ind.