Reducing Main Memory Access Latency Through SDRAM Address Mapping Techniques and Access Reordering Mechanisms
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Modeling System Signal Integrity Uncertainty Considerations
WHITE PAPER Intel® FPGA Modeling System Signal Integrity Uncertainty Considerations Authors Abstract Ravindra Gali This white paper describes signal integrity (SI) mechanisms that cause system-level High-Speed I/O Applications timing uncertainty and how these mechanisms are modeled in the Intel® Quartus® Engineering, Intel® Corporation Prime software Timing Analyzer to achieve timing closure for external memory interface designs. Zhi Wong By using the Intel Quartus Prime software to achieve timing closure for external High-Speed I/O Applications memory interfaces, a designer does not need to allocate a separate SI timing Engineering, Intel Corporation budget to account for simultaneous switching output (SSO), simultaneous Navid Azizi switching input (SSI), intersymbol interference (ISI), and board-level crosstalk for Software Engineeringr flip-chip device families such as Stratix® IV and Arria® II FPGAs for typical user Intel Corporation implementation of external memory interfaces following good board design practices. John Oh High-Speed I/O Applications Introduction Engineering, Intel Corporation The widening performance gap between FPGAs, microprocessors, and memory Arun VR devices, along with the growth of memory-intensive applications, are driving the Memory I/O Applications Engineering, need for faster memory technologies. This push to higher bandwidths has been Intel Corporation accompanied by an increase in the signal count and the signaling rates of FPGAs and memory devices. In order to attain faster bandwidths, device makers continue to reduce the supply voltage. Initially, industry-standard DIMMs operated at 5 V. However, due to improvements in DRAM storage density, the operating voltage was decreased to 3.3 V (SDR), then to 2.5V (DDR), 1.8 V (DDR2), 1.5 V (DDR3), and 1.35 V (DDR3) to allow the memory to run faster and consume less power. -

Memory & Devices
Memory & Devices Memory • Random Access Memory (vs. Serial Access Memory) • Different flavors at different levels – Physical Makeup (CMOS, DRAM) – Low Level Architectures (FPM,EDO,BEDO,SDRAM, DDR) • Cache uses SRAM: Static Random Access Memory – No refresh (6 transistors/bit vs. 1 transistor • Main Memory is DRAM: Dynamic Random Access Memory – Dynamic since needs to be refreshed periodically (1% time) – Addresses divided into 2 halves (Memory as a 2D matrix): • RAS or Row Access Strobe • CAS or Column Access Strobe Random-Access Memory (RAM) Key features – RAM is packaged as a chip. – Basic storage unit is a cell (one bit per cell). – Multiple RAM chips form a memory. Static RAM (SRAM) – Each cell stores bit with a six-transistor circuit. – Retains value indefinitely, as long as it is kept powered. – Relatively insensitive to disturbances such as electrical noise. – Faster and more expensive than DRAM. Dynamic RAM (DRAM) – Each cell stores bit with a capacitor and transistor. – Value must be refreshed every 10-100 ms. – Sensitive to disturbances. – Slower and cheaper than SRAM. Semiconductor Memory Types Static RAM • Bits stored in transistor “latches” à no capacitors! – no charge leak, no refresh needed • Pro: no refresh circuits, faster • Con: more complex construction, larger per bit more expensive transistors “switch” faster than capacitors charge ! • Cache Static RAM Structure 1 “NOT ” 1 0 six transistors per bit 1 0 (“flip flop”) 0 1 0/1 = example 0 Static RAM Operation • Transistor arrangement (flip flop) has 2 stable logic states • Write 1. signal bit line: High à 1 Low à 0 2. address line active à “switch” flip flop to stable state matching bit line • Read no need 1. -

DDR and DDR2 SDRAM Controller Compiler User Guide
DDR and DDR2 SDRAM Controller Compiler User Guide 101 Innovation Drive Software Version: 9.0 San Jose, CA 95134 Document Date: March 2009 www.altera.com Copyright © 2009 Altera Corporation. All rights reserved. Altera, The Programmable Solutions Company, the stylized Altera logo, specific device designations, and all other words and logos that are identified as trademarks and/or service marks are, unless noted otherwise, the trademarks and service marks of Altera Corporation in the U.S. and other countries. All other product or service names are the property of their respective holders. Altera products are protected under numerous U.S. and foreign patents and pending ap- plications, maskwork rights, and copyrights. Altera warrants performance of its semiconductor products to current specifications in accordance with Altera's standard warranty, but reserves the right to make changes to any products and services at any time without notice. Altera assumes no responsibility or liability arising out of the application or use of any information, product, or service described herein except as expressly agreed to in writing by Altera Corporation. Altera customers are advised to obtain the latest version of device specifications before relying on any published information and before placing orders for products or services. UG-DDRSDRAM-10.0 Contents Chapter 1. About This Compiler Release Information . 1–1 Device Family Support . 1–1 Features . 1–2 General Description . 1–2 Performance and Resource Utilization . 1–4 Installation and Licensing . 1–5 OpenCore Plus Evaluation . 1–6 Chapter 2. Getting Started Design Flow . 2–1 SOPC Builder Design Flow . 2–1 DDR & DDR2 SDRAM Controller Walkthrough . -

AXP Internal 2-Apr-20 1
2-Apr-20 AXP Internal 1 2-Apr-20 AXP Internal 2 2-Apr-20 AXP Internal 3 2-Apr-20 AXP Internal 4 2-Apr-20 AXP Internal 5 2-Apr-20 AXP Internal 6 Class 6 Subject: Computer Science Title of the Book: IT Planet Petabyte Chapter 2: Computer Memory GENERAL INSTRUCTIONS: • Exercises to be written in the book. • Assignment questions to be done in ruled sheets. • You Tube link is for the explanation of Primary and Secondary Memory. YouTube Link: ➢ https://youtu.be/aOgvgHiazQA INTRODUCTION: ➢ Computer can store a large amount of data safely in their memory for future use. ➢ A computer’s memory is measured either in Bits or Bytes. ➢ The memory of a computer is divided into two categories: Primary Memory, Secondary Memory. ➢ There are two types of Primary Memory: ROM and RAM. ➢ Cache Memory is used to store program and instructions that are frequently used. EXPLANATION: Computer Memory: Memory plays a very important role in a computer. It is the basic unit where data and instructions are stored temporarily. Memory usually consists of one or more chips on the mother board, or you can say it consists of electronic components that store instructions waiting to be executed by the processor, data needed by those instructions, and the results of processing the data. Memory Units: Computer memory is measured in bits and bytes. A bit is the smallest unit of information that a computer can process and store. A group of 4 bits is known as nibble, and a group of 8 bits is called byte. -

Dual-DIMM DDR2 and DDR3 SDRAM Board Design Guidelines, External
5. Dual-DIMM DDR2 and DDR3 SDRAM Board Design Guidelines June 2012 EMI_DG_005-4.1 EMI_DG_005-4.1 This chapter describes guidelines for implementing dual unbuffered DIMM (UDIMM) DDR2 and DDR3 SDRAM interfaces. This chapter discusses the impact on signal integrity of the data signal with the following conditions in a dual-DIMM configuration: ■ Populating just one slot versus populating both slots ■ Populating slot 1 versus slot 2 when only one DIMM is used ■ On-die termination (ODT) setting of 75 Ω versus an ODT setting of 150 Ω f For detailed information about a single-DIMM DDR2 SDRAM interface, refer to the DDR2 and DDR3 SDRAM Board Design Guidelines chapter. DDR2 SDRAM This section describes guidelines for implementing a dual slot unbuffered DDR2 SDRAM interface, operating at up to 400-MHz and 800-Mbps data rates. Figure 5–1 shows a typical DQS, DQ, and DM signal topology for a dual-DIMM interface configuration using the ODT feature of the DDR2 SDRAM components. Figure 5–1. Dual-DIMM DDR2 SDRAM Interface Configuration (1) VTT Ω RT = 54 DDR2 SDRAM DIMMs (Receiver) Board Trace FPGA Slot 1 Slot 2 (Driver) Board Trace Board Trace Note to Figure 5–1: (1) The parallel termination resistor RT = 54 Ω to VTT at the FPGA end of the line is optional for devices that support dynamic on-chip termination (OCT). © 2012 Altera Corporation. All rights reserved. ALTERA, ARRIA, CYCLONE, HARDCOPY, MAX, MEGACORE, NIOS, QUARTUS and STRATIX words and logos are trademarks of Altera Corporation and registered in the U.S. Patent and Trademark Office and in other countries. -

Solving High-Speed Memory Interface Challenges with Low-Cost Fpgas
SOLVING HIGH-SPEED MEMORY INTERFACE CHALLENGES WITH LOW-COST FPGAS A Lattice Semiconductor White Paper May 2005 Lattice Semiconductor 5555 Northeast Moore Ct. Hillsboro, Oregon 97124 USA Telephone: (503) 268-8000 www.latticesemi.com Introduction Memory devices are ubiquitous in today’s communications systems. As system bandwidths continue to increase into the multi-gigabit range, memory technologies have been optimized for higher density and performance. In turn, memory interfaces for these new technologies pose stiff challenges for designers. Traditionally, memory controllers were embedded in processors or as ASIC macrocells in SoCs. With shorter time-to-market requirements, designers are turning to programmable logic devices such as FPGAs to manage memory interfaces. Until recently, only a few FPGAs supported the building blocks to interface reliably to high-speed, next generation devices, and typically these FPGAs were high-end, expensive devices. However, a new generation of low-cost FPGAs has emerged, providing the building blocks, high-speed FPGA fabric, clock management resources and the I/O structures needed to implement next generation DDR2, QDR2 and RLDRAM memory controllers. Memory Applications Memory devices are an integral part of a variety of systems. However, different applications have different memory requirements. For networking infrastructure applications, the memory devices required are typically high-density, high-performance, high-bandwidth memory devices with a high degree of reliability. In wireless applications, low-power memory is important, especially for handset and mobile devices, while high-performance is important for base-station applications. Broadband access applications typically require memory devices in which there is a fine balance between cost and performance. -

Access Order and Effective Bandwidth for Streams on a Direct Rambus Memory Sung I
Access Order and Effective Bandwidth for Streams on a Direct Rambus Memory Sung I. Hong, Sally A. McKee†, Maximo H. Salinas, Robert H. Klenke, James H. Aylor, Wm. A. Wulf Dept. of Electrical and Computer Engineering †Dept. of Computer Science University of Virginia University of Utah Charlottesville, VA 22903 Salt Lake City, Utah 84112 Abstract current DRAM page forces a new page to be accessed. The Processor speeds are increasing rapidly, and memory speeds are overhead time required to do this makes servicing such a request not keeping up. Streaming computations (such as multi-media or significantly slower than one that hits the current page. The order of scientific applications) are among those whose performance is requests affects the performance of all such components. Access most limited by the memory bottleneck. Rambus hopes to bridge the order also affects bus utilization and how well the available processor/memory performance gap with a recently introduced parallelism can be exploited in memories with multiple banks. DRAM that can deliver up to 1.6Gbytes/sec. We analyze the These three observations — the inefficiency of traditional, performance of these interesting new memory devices on the inner dynamic caching for streaming computations; the high advertised loops of streaming computations, both for traditional memory bandwidth of Direct Rambus DRAMs; and the order-sensitive controllers that treat all DRAM transactions as random cacheline performance of modern DRAMs — motivated our investigation of accesses, and for controllers augmented with streaming hardware. a hardware streaming mechanism that dynamically reorders For our benchmarks, we find that accessing unit-stride streams in memory accesses in a Rambus-based memory system. -

64M X 16 Bit DDRII Synchronous DRAM (SDRAM) Advance (Rev
AS4C64M16D2A-25BAN Revision History 1Gb Auto-AS4C64M16D2A - 84 ball FBGA PACKAGE Revision Details Date Rev 1.0 Preliminary datasheet Jan 2018 Alliance Memory Inc. 511 Taylor Way, San Carlos, CA 94070 TEL: (650) 610-6800 FAX: (650) 620-9211 Alliance Memory Inc. reserves the right to change products or specification without notice Confidential - 1 of 62 - Rev.1.0 Jan. 2018 AS4C64M16D2A-25BAN 64M x 16 bit DDRII Synchronous DRAM (SDRAM) Advance (Rev. 1.0, Jan. /2018) Features Overview JEDEC Standard Compliant The AS4C64M16D2A is a high-speed CMOS Double- AEC-Q100 Compliant Data-Rate-Two (DDR2), synchronous dynamic random- JEDEC standard 1.8V I/O (SSTL_18-compatible) access memory (SDRAM) containing 1024 Mbits in a 16-bit wide data I/Os. It is internally configured as a 8- Power supplies: V & V = +1.8V 0.1V DD DDQ bank DRAM, 8 banks x 8Mb addresses x 16 I/Os. The Operating temperature: TC = -40~105°C (Automotive) device is designed to comply with DDR2 DRAM key Supports JEDEC clock jitter specification features such as posted CAS# with additive latency, Fully synchronous operation Write latency = Read latency -1, Off-Chip Driver (OCD) Fast clock rate: 400 MHz impedance adjustment, and On Die Termination(ODT). Differential Clock, CK & CK# All of the control and address inputs are synchronized Bidirectional single/differential data strobe with a pair of externally supplied differential clocks. Inputs are latched at the cross point of differential clocks (CK - DQS & DQS# rising and CK# falling) All I/Os are synchronized with a 8 internal banks for concurrent operation pair of bidirectional strobes (DQS and DQS#) in a source 4-bit prefetch architecture synchronous fashion. -

CPU Clock Rate DRAM Access Latency Growing
CPU clock rate . Apple II – MOS 6502 (1975) 1~2MHz . Original IBM PC (1981) – Intel 8080 4.77MHz CS/COE1541: Introduction to . Intel 486 50MHz Computer Architecture . DEC Alpha Memory hierarchy • EV4 (1991) 100~200MHz • EV5 (1995) 266~500MHz • EV6 (1998) 450~600MHz Sangyeun Cho • EV67 (1999) 667~850MHz Computer Science Department University of Pittsburgh . Today’s processors – 2~5GHz CS/CoE1541: Intro. to Computer Architecture University of Pittsburgh 2 DRAM access latency Growing gap . How long would it take to fetch a memory block from main memory? • Time to determine that data is not on-chip (cache miss resolution time) • Time to talk to memory controller (possibly on a separate chip) • Possible queuing delay at memory controller • Time for opening a DRAM row • Time for selecting a portion in the selected row (CAS latency) • Time to transfer data from DRAM to CPU Possibly through a separate chip • Time to fill caches as needed . The total latency can be anywhere from 100~400 CPU cycles CS/CoE1541: Intro. to Computer Architecture University of Pittsburgh CS/CoE1541: Intro. to Computer Architecture University of Pittsburgh 3 4 Idea of memory hierarchy Memory hierarchy goals . To create an illusion of “fast and large” main memory Smaller CPU Faster Regs • As fast as a small SRAM-based memory More expensive per byte • As large (and cheap) as DRAM-based memory L1 cache . To provide CPU with necessary data and instructions as SRAM quickly as possible • Frequently used data must be placed near CPU L2 cache • “Cache hit” when CPU finds its data in cache SRAM • Cache hit rate = # of cache hits/# cache accesses • Avg. -
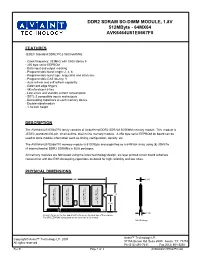
DDR2 SDRAM SO-DIMM MODULE, 1.8V 512Mbyte - 64MX64 AVK6464U51E5667F0
DDR2 SDRAM SO-DIMM MODULE, 1.8V 512MByte - 64MX64 AVK6464U51E5667F0 FEATURES JEDEC Standard DDR2 PC2-5300 667MHz - Clock frequency: 333MHz with CAS latency 5 - 256 byte serial EEPROM - Data input and output masking - Programmable burst length: 2, 4, 8 - Programmable burst type: sequential and interleave - Programmable CAS latency: 5 - Auto refresh and self refresh capability - Gold card edge fingers - 8K refresh per 64ms - Low active and standby current consumption - SSTL-2 compatible inputs and outputs - Decoupling capacitors at each memory device - Double-sided module - 1.18 inch height DESCRIPTION The AVK6464U51E5667F0 family consists of Unbuffered DDR2 SDRAM SODIMM memory module. This module is JEDEC-standard 200-pin, small-outline, dual in-line memory module. A 256 byte serial EEPROM on board can be used to store module information such as timing, configuration, density, etc. The AVK6464U51E5667F0 memory module is 512MByte and organized as a 64MX64 array using (8) 32MX16 (4 internal banks) DDR2 SDRAMs in BGA packages. All memory modules are fabricated using the latest technology design, six-layer printed circuit board substrate construction with low ESR decoupling capacitors on-board for high reliability and low noise. PHYSICAL DIMENSIONS 2.661 0.040 256MBit 256MBit 256MBit 256MBit 1.18 32MX8 DDR2 32MX8 DDR2 32MX8 DDR2 32MX8 DDR2 BGA SDRAM BGA SDRAM BGA SDRAM BGA SDRAM 512MBit (8MX16X4) 512MBit (8MX16X4) S 512MBit (8MX16X4) 512MBit (8MX16X4) P 32MX16 DDR2 BGA SDRAM 32MX16 DDR2 BGA SDRAM D 32MX16 DDR2 BGA SDRAM 32MX16 DDR2 BGA SDRAM 0.787 1 199 0.140 All gray ICs are on the top, and all white ICs are on the back side of the modude The SPD EEPROM is populated on the back side of the module BGA Package Avant™ Technology LP. -

DDR400/333/266, Dual DDR, RDRAM 16 Bit and 32 Bit, SDRAM
Ace’s Hardware Granite Bay: Memory Technology Shootout Granite Bay: Memory Technology Shootout By Johan De Gelas – December 2002 Dual-Channel DDR SDRAM Arrives for the Pentium 4 DDR400/333/266, Dual DDR, RDRAM 16 bit and 32 bit, SDRAM... almost every memory technology on the market is available for the Pentium 4 platform. One of our previous technical articles discussed the advantages and disadvantages of the different architectures of Rambus and SDRAM based memory technology such as DDR and DDR-II. In this article, we will investigate how the different memory technologies and their supporting chipsets compare on the test bench. The following motherboards were tested: • The ASUS P4T533 features the i850E chipset and 32 bit RDRAM • The ASUS P4T533-C comes with the same chipset but uses two channels of 16 bit RIMMs • The MSI 648 Max comes with SIS 648 chipset which unofficially supports DDR400 • The MSI i845PE comes with Intel's newest i845 chipset, which officially support DDR333 • The Tyan Trinity 7205 and MSI GNB Max feature the Dual DDR266 Granite Bay chipset We are well aware that there have already many tests with Pentium 4 chipsets, Granite Bay included. So why bother to publish another on Ace’s Hardware? The focus of this article is on the memory technology supported by these chipsets. This article will offer you a insight in how the different memory technologies compare in a wide variety of applications. We'll investigate in depth what the advantages and disadvantages are of each memory technology and try to find out what are the reasons behind this. -
Chang-Hong Wu Distinguished Engineer, Juniper Networks the INTERNET EXPLOSION
ASICS: THE HEART OF MODERN ROUTERS Chang-Hong Wu Distinguished Engineer, Juniper Networks THE INTERNET EXPLOSION # Web Sites 130EB/yr Internet Capacity 162M # Connected Devices 1B Total Digitized Information 420EB # Google Searches/Month 100M 31B/mo 12EB/yr 40M 110EB 4PB/yr 60PB/yr 9.5M 160M 25M 33K 1 1.7M 2.7B/mo 1988 1993 1998 2003 2008 Exponential growth, no matter how you measure it! The clearest indication of value delivered to end-users 2 Copyright © 2010 Juniper Networks, Inc. DRIVING FORCE BEHIND EXPONENTIAL GROWTH C S C S N C S Information N System N Digital Stored Pipelining Microprocessor Multi-core Computing Program Computing Digital Circuit Packet TCP/IP Transmission Switching Switching HPN Networking Flash Digital Core Disk DRAM Storage Memory Storage 3 Copyright © 2010 Juniper Networks, Inc. COMPUTER PERFORMANCE: 1988-2008 228 500,000 X over 20 years 226 224 222 220 218 System CAGR: 1.9x /year 216 214 12 2 Super Computers 210 28 26 Megahertz Megahertz / MFlops 24 Microprocessor CAGR: 1.3x /year 22 20 „88 „89 „90 „91 „92 „93 „94 „95 „96 „97 „98 „99 „00 „01 „02 „03 „04 „05 „06 „07 „08 4 Copyright © 2010 Juniper Networks, Inc. ROUTER PERFORMANCE 1988 – 2008 1000,000 X over 20 years (2x /year) 224 Post-ASIC era: 2.2x /year TX T1600 222 220 T640 M160 218 Pre-ASIC era: 1.6x /year M40 216 214 212 Interface CAGR: 1.7x /year 210 28 26 Megabits per second 24 22 20 „88 „89 „90 „91 „92 „93 „94 „95 „96 „97 „98 „99 „00 „01 „02 „03 „04 „05 „06 „07 „08 5 Copyright © 2010 Juniper Networks, Inc.