2013 ASME Dynamic Systems and Control Conference Sponsoring Organization
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Cristian Bota 3Socf5x9eyz6
Cristian Bota https://www.facebook.com/index.php?lh=Ac- _3sOcf5X9eyz6 Das Imperium Talent Agency Berlin (D.I.T.A.) Georg Georgi Phone: +49 151 6195 7519 Email: [email protected] Website: www.dasimperium.com © b Information Acting age 25 - 35 years Nationality Romanian Year of birth 1992 (29 years) Languages English: fluent Height (cm) 180 Romanian: native-language Weight (in kg) 68 French: medium Eye color green Dialects Resita dialect: only when Hair color Brown required Hair length Medium English: only when required Stature athletic-muscular Accents Romanian: only when required Place of residence Bucharest Instruments Piano: professional Cities I could work in Europe, Asia, America Sport Acrobatics, Aerial yoga, Aerobics, Aikido, Alpine skiing, American football, Archery, Artistic cycling, Artistic gymnastics, Athletics, Backpacking, Badminton, Ballet, Baseball, Basketball, Beach volleyball, Biathlon, Billiards, BMX, Body building, Bodyboarding, Bouldering, Bowling, Boxing, Bujinkan, Bungee, Bycicle racing, Canoe/Kayak, Capoeira, Caster board, Cheerleading, Chinese martial arts, Climb, Cricket, Cross-country skiing, Crossbow shooting, CrossFit, Curling, Dancesport, Darts, Decathlon, Discus throw, Diving, Diving (apnea), Diving (bottle), Dressage, Eskrima/Kali, Fencing (sports), Fencing (stage), Figure skating, Finswimming, Fishing, Fistball, Fitness, Floor Exercise, Fly fishing, Free Climbing, Frisbee, Gliding, Golf, Gymnastics, Gymnastics, Hammer throw, Handball, Hang- Vita Cristian Bota by www.castupload.com — As of: 2021-05-10 -

Penderyn Press Pack Nov 5Th 2018
PENDERYN PRESS PACK NOV 5TH 2018 PENDERYN WHISKY: 100 YEARS IN THE MAKING Penderyn Whisky is made at the Penderyn Distillery which is located in the southern foothills of the famous Brecon Beacons National Park, north-west of Cardiff, and north- east of Swansea. Small stills existed in Wales in the 4th century, but the last whisky officially distilled in Wales was produced by the original, but short-lived Welsh Whisky Company at the Frongoch Distillery in Bala, North Wales, which closed in the early 1900s. Other notable characters in Wales’ whisky past include David Lloyd George, the only Welsh Prime Minister of Great Britain, who introduced the ‘3 year/1 day’ rule for whisky maturing; and Evan Williams (from Dale in Pembrokeshire) who was one of the founders of the American Bourbon industry. The idea for Penderyn was conceived by a group of friends sitting around a pub table in The Glancynon Inn in nearby Hirwaun, who decided to re-introduce the lost art of whisky distilling to Wales when they bought an un-commissioned whisky still designed by Dr David Faraday, a descendant of the famous Victorian scientist, Michael Faraday. Their dream was to create a world class single malt whisky. On Thursday 14 September 2000 the first distillation was carried out. The whisky is distilled in a unique single column still, producing a flavourful spirit at 92% abv which is married with water from the Brecon Beacons. The late great Master Distiller Dr Jim Swan came on board in 2002 and his vision helped create Penderyn’s unique style. -

Port-Based Modeling and Control for Efficient Bipedal Walking Robots
Port-Based Modeling and Control for Efficient Bipedal Walking Robots Vincent Duindam The research described in this thesis has been conducted at the Department of Electrical Engineering, Math, and Computer Science at the University of Twente, and has been financially supported by the European Commission through the project Geometric Network Modeling and Control of Complex Physical Systems (GeoPlex) with reference code IST-2001-34166. The research reported in this thesis is part of the research program of the Dutch Institute of Systems and Control (DISC). The author has succesfully completed the educational program of the Graduate School DISC. ISBN 90-365-2318-4 The cover picture of this thesis is based on the work ’Ascending and Descending’ by Dutch graphic artist M.C. Escher (1898–1972), who, in turn, was inspired by an article by Penrose & Penrose (1958). Copyright c 2006 by V. Duindam, Enschede, The Netherlands No part of this work may be reproduced by print, photocopy, or any other means without the permission in writing from the publisher. Printed by PrintPartners Ipskamp, Enschede, The Netherlands PORT-BASED MODELING AND CONTROL FOR EFFICIENT BIPEDAL WALKING ROBOTS PROEFSCHRIFT ter verkrijging van de graad van doctor aan de Universiteit Twente, op gezag van de rector magnificus, prof. dr. W.H.M. Zijm, volgens besluit van het College voor Promoties in het openbaar te verdedigen op vrijdag 3 maart 2006 om 13.15 uur door Vincent Duindam geboren op 21 oktober 1977 te Leiderdorp, Nederland Dit proefschrift is goedgekeurd door: Prof. dr. ir. S. Stramigioli, promotor Prof. dr. ir. J. van Amerongen, promotor Samenvatting Lopende robots zijn complexe systemen, vanwege hun niet-lineaire dynamica en interactiekrachten met de grond. -

Diccionario De Anglicismos Y Otros Extranjerismos
DICCIONARIO DE ANGLICISMOS Y OTROS EXTRANJERISMOS AUTOR DÁMASO SUÁREZ IGLESIAS (REGISTRO DE LA PROPIEDAD INTELECTUAL LO-133/2019) 1 A ABATTOIR. Galicismo por matadero, degolladero. ABERDEEN TERRIER. Anglicismo por terrier escocés (cierto perro). ABOCATERO (AVOCAT). Galicismo por aguacate . ABSENTA (ABSAINTE). Galicismo por ajenjo y absintio . Tiene mucho uso. ABSTRACT. Anglicismo por resumen , sumario , extracto o sinopsis. ACADEMIC FREEDOM. Anglicismo por libertad de cátedra . ACCOUNT. Anglicismo por cuenta. ACCOUNTANT. Anglicismo por contador (persona que lleva la contaduría). ACCOUNTING. Anglicismo por contaduría , teneduría de libros . ACCRUED INTEREST. Anglicismo por intereses acumulados, intereses devengados, intereses de demora . ACE. Anglicismo por tanto de saque , tanto directo de saque, punto directo (en el ámbito del tenis). También significa hoyo en uno (en el ámbito del golf). ACID TEST. Anglicismo por prueba de fuego , piedra de toque y coeficiente de liquidez inmediata . ACTA por LEY. Acta en español designa la relación escrita que recoge los acuerdos y deliberaciones de alguna junta; también se llama así a la relación de la vida de algún mártir. No significa decreto , ley o convenio . Quienes le dan tales sentidos lo hacen por influencia del idioma inglés. ACTA DE GUERRA (WAR ACT). Anglicismo por ley de poderes de guerra . ACTION MAN. Anglicismo por hombre forzudo , hombre musculoso . ACTION PAINTING. Anglicismo por pintura de acción , pintura gestual . ACTIVITY-BASED COSTING. Anglicismo por contaduría por actividades, costos por actividades . ACULOTAR (CULOTTER). Galicismo por ennegrecer (una pipa o boquilla. ADAGIETTO. Vocablo italiano con que se designa cierto movimiento musical que debe interpretarse algo más rápido que el adagio. Su hispanización es adagieto . AD BLOCKER. -

NORTHAMPTON Cmtre Forchild-Mand Youth
a University College E NORTHAMPTON Cmtre forchild-mand Youth PROJECTDATA USERGUIDE . ,’, . ., ,. ,. Exploring the fourth environment: Young people’s use of place and views on their environment Introduction The purpose of this guide is to individually outline each of the study areas which feature in the ‘Exploring the fourth environment: young people’s use of place and views on their local environment’ project. The project was based in three contrasting types of locality across Northamptonshire and the work was carried out between October 1996 and September 1999. The guide is set out in the following sections: Section 1: Project Aims, Objectives and Methods of Research Page 1 - 5 -Includes a project publications list Section 2: Data Collection Summary Tables Page 6 - 9 -This section provides a detailed breakdown of exactly where and how the information was collected, sample sizes and/or data availability. Note that not all study areas were used in all aspects of the project work. Section 3: Database and Transcription File Matrices Page 10 - 14 -This section provides a detailed breakdown of all the relevant files/file types that are associated with the analysis of the data. There are two types of file that are listed. Database files (used to analyse the collective results of the individual questionnaire based surveys) are listed as ***.SAV files. These files are useable with SPSS (6.1 for Windows or above). Text files (used for the transcription of interviews) are listed as ***.DOC files. They can be accessed using MS Word 6.0 for Windows or above. As with the tables in Section 2, the files are listed by location and by role that that respective locations play in each of the individual surveys. -

English and Welsh Whisky Trail
WHISKY TRAIL DESTINATIONS Dunstanburgh Castle 1 ABER FALLS DISTILLERY Llanfairfechan 10 DARTMOOR WHISKY DISTILLERY Newton Abbot ENGLISH AND Aber Falls Distillery sits at the foot of the famous Aber Falls waterfall. Previously a slate Production of Dartmoor Whisky began in 2016, after a group of whisky enthusiasts visited WELSH WHISKY works in the 19th century, a margarine factory during the world wars, and more recently a Islay in Scotland and came back determined to make whisky in Devon. The climate, soil, drinks wholesaler depot, the distillery has been lovingly restored. Dartmoor spring water and sea breeze are all ideal for producing whisky. TRAIL Address: Station Road, Abergwyngregyn, North Wales, LL33 0LB Address: The Town Hall, Bovey Tracey, Devon TQ13 9AA Web: www.aberfallsdistillery.com Web: www.dartmoorwhiskydistillery.co.uk Durham Cathedral Open: 12 noon - 4pm Thursday to Sunday. Open: Open 7 days a week, with tours starting at 11am and 3pm. The Lake District 2 ADNAMS COPPER HOUSE DISTILLERY Southwold 11 DURHAM DISTILLERY Durham 11 10 1616 Best-known as a brewer of beer in the coastal town of Southwold in Suffolk, Adnams Founded in 2014, Durham Distillery initially produced Durham Gin, and will be producing produce award-winning spirits using locally-sourced grains that are found in their beers, in the North-East’s first single malt whisky in late-2018 when the move to a new state-of- the Copper House Distillery, which opened in 2010. the-art distillery in Durham city centre is complete. Address: The Sole Bay Brewery, Southwold, Suffolk, IP18 6JW Addresses: 2F & 2G Riverside Industrial Estate, Langley Park, Durham DH7 9TT. -
En LONWAHI Goodgodfreysnightmenu June2014.Pdf
WELCOME TO GOOD GODFREY’S Good Godfrey’s proudly takes its name from the former leader of the Waldorf House band, the handsome and talented Howard Godfrey. *IKSQV\PM:WIZQVO»[/WLNZMaIVLPQ[?ITLWZÅIV[ House Band put on the Best Show in Town as London learned to tango at the Waldorf. So Godfrey is the inspiration for this bar, in the heart of London’s vibrant Theatre Land. We’ve taken a quintessentially English phrase and paid homage to the glamour and talent of our young band leader, a serious player on the social scene with hit records and huge popular acclaim. Our pride in the Waldorf ’s opulent past has created somewhere really quite wonderful, a place we hope you’ll enjoy and return to often, and ‘Good Godfrey’ how the cocktails have improved… CHAMPAGNES CHAMPAGNE BY THE GLASS C O BRUT 125ml Glass w Heidsieck & Co Monopole Silver Top Brut, NV £14.00 w Pommery, NV £15.50 Moët & Chandon Brut Impérial £17.50 ROSÉ Pommery Rosé Apanage, NV £19.00 i Moët & Chandon Brut Rosé, NV £19.50 CHAMPAGNE BY THE BOTTLE w NON VINTAGE 750ml Bottle Heidsieck & Co Monopole Silver Top Brut, NV £64.00 Pommery, NV £72.00 Moët & Chandon Brut Impérial, NV £76.00 b Pol Roger, NV £87.00 j Bollinger Special Cuvée, NV £92.00 Veuve Clicquot Yellow Label, NV £99.00 Ruinart Blanc de Blancs, NV £102.00 Krug Grand Cuvée, NV £240.00 G ROSÉ Pommery Rosé Apanage, NV £95.00 Moët & Chandon Brut Rosé £105.00 Laurent-Perrier Rosé, NV £124.00 VINTAGE Bollinger Grand Année Brut 2000 £165.00 Dom Pérignon 2000 £250.00 Louis Roederer “Cristal” 2002 £295.00 A CHAMPAGNE COCKTAILS CHAMPAGNE JULEP £15.00 Often referred to as the sophisticated cousin of the ‘mint Julep’, this drink will delight Champagne fans. -
620 DIRTY MARTINI Menu 2016 20Pp Web Cardiff V8.Indd
SPIRITED SOPHISTICATION COCKTAILS & FOOD HappyHappy HourHour Celebrate the everyday. HALF PRICE MARTINIS, DIRTY DOZEN COCKTAILS & BOTTLES OF WINE £10 OFF BOTTLES OF PROSECCO & CHAMPAGNE £2.95 ASAHI & CORONA BEER TWO SHARING PLATTERS FOR £20 HAPPY HOUR TIMES ARE SUBJECT TO CHANGE ON BANK HOLIDAYS AND DURING DECEMBER. CHECK OUR WEBSITE FOR HAPPY HOUR TIMES. HAPPY HOUR IS NOT AVAILABLE ON MATCH DAYS. OUR STANDARD SPIRITS MEASURE IS ��ML, ��ML MEASURES ARE AVAILABLE ON REQUEST FOR COCKTAIL, FOOD ALLERGY AND INTOLERANCE INFORMATION, PLEASE ASK A MEMBER OF STAFF BEFORE ORDERING DirtyDirty PISCOLA £9.75 DozenDozen La Dia Blada Pisco and Briottet Crème de Bergamot are shaken with guava juice, fresh lemon juice, egg white, demerara gomme syrup and kaffir lime leaves FINE & DANDY £10.50 Absolut Blue Vodka and Velvet Falernum are shaken with fresh These are a few of our favourite things… lime juice, cranberry juice, grenadine syrup and orange bitters THE BEES KNEES £9.50 Tanqueray Gin is shaken with Canadian maple syrup, fresh lemon juice, egg white, dried lavender and a dash of Fee Brothers Whiskey Barrel-Aged Bitters THE GREEN MONK £10.00 La Dia Blada Pisco is shaken with Green Chartreuse, fresh lemon juice, organic agave nectar, almond milk, egg white, fresh mint and green matcha powder RASPBERRY & GINGER SMASH £9.75 SHERRY BLUSH £9.50 Tanqueray Gin and Bold London Spirit are blended with Manzanilla Sherry and Disaronno Amaretto are shaken with cranberry juice, fresh lemon juice, gomme syrup, fresh ginger fresh lemon juice, raspberry syrup and -
The Mulberry Bar
WELCOME TO THE MULBERRY BAR It’s time to prepare yourself for a truly unique experience. From the opulent hues of gold and purple which inspired our name, to the intriguing artwork and bespoke furnishings that add to the lavish atmosphere, The Mulberry Bar is one of a kind. Stylish, special and deliciously different. Our master mixologists have thrown away the rule book, creating show-stopping cocktails with a touch of the theatrical. Step out of your comfort zone and discover a tantalising new tipple with a twist. Sip on artfully crafted cocktails, explore our gin collection or work your way through our champagne, whisky or wine selection. Sit back, relax and soak up the sumptuous surroundings as you marvel at our mixologists’ cutting-edge creations. CANDY FLOSS ROYAL Black Muscat meets candy floss, decadently drenched in Jacquart Signature champagne LEMON DROP Served with a scoop of Mario’s lemon sorbet, Grey Goose Le Citron meets Limoncello, if sour and sharp is for you, then this is the perfect for you. APPLE TATIN William Chase Elegant Gin deliciously blended with fresh apple and smooth caramel, finished with a blow torch. MULBERRY SMOKED OLD FASHIONED Penderyn Peated whiskey expertly mixed with angostura, SIGNATURES maraschino and citrus zest, our Welsh twist on COCKTAILS this timeless classic. ICED SPRITZ Our cocktails have been creatively designed by our talented Absolut Citron infused with mulberry preserve match Mulberry Bar team to stimulate your tastebuds. perfectly with Ice Cuvée and nitrous oxide. Whether you have tried a cocktail somewhere else or have a favourite classic, our Bartenders will be delighted to mix TOASTED SOUR something especially for you. -
DRINKS-MENU-2021-July.Pdf
COCKTAILS 3 Cocktails 3 Mocktails 3 WINES BY THE GLASS 4 White wine by the glass 4 Red wine by the glass 5 Rose wine by the glass 6 Sparkling wine by the glass 6 WINES BY THE GLASS 7 Vintage wines by the glass 7 GIN RECOMMENDATIONS 8 Gins 8 Flavoured gins 9 FULL GIN LIST 10 SPARKLING WINES 11 Cava, Spain 11 Champagne, France (Brut) 12 Champagne, France (Rose) 13 WHITE WINE 14 Spain 14 France 14 Italy 15 New Zealand 15 South Africa 15 Australia 15 Argentina 15 Chile 15 Uruguay 15 RED WINE 16 Spain 16 France 16 Italy 18 New Zealand 18 1 South Africa 18 Australia 18 Chile 19 Argentina 19 Uruguay 19 Usa 19 ROSE WINE 20 Spain 20 France 20 LAGERS & ALES 21 On draught 21 On handpull 21 Bottled beer and cider 21 SOFT DRINKS 22 SHERRY, PORT & SWEET WINE 23 PORT 24 SWEET WINE 25 AFTER DINNER DRINKS 26 Cognac & Armagnac 26 Spanish brandy 26 Scotch 26 Irish whisky 26 Japanese whisky 27 Spanish whisky 27 Swedish whisky 27 American & Canadian 27 Welsh whisky 27 Liquors and spirits 28 Coffee, tea and liquor coffee 29 I HOPE YOU ENJOY OUR SELECTION OF WINES. WE HAVE SPENT THE LAST 2 DECADES BUILDING RELATIONSHIPS WITH GROWERS AND SUPPLIERS TO BRING THEIR EXCELLENT WINES TO OUR LIST. EACH OF OUR WINES HAS A UNIQUE STORY TO TEL L….. PLEASE NOTE ALL VINTAGES AND LINES ARE SUBJECT TO AVAILABILITY. WE OPERATE AN EXTREMELY LARGE LIST AND UNFORTUNATELY NOT EVERYTHING IS AVAILABLE ALL OF THE TIME 2 COCKTAILS Cocktails ESPRESSO MARTINI £10 Grey Goose vodka, Kahlua, espresso COSMOPOLITAN £10 Grey Goose vodka, Cointreau, cranberry, lime FRENCH MARTINI £10 Grey -

World Best Brandy, Liqueur, Rum and Vodka Announced 20 April 2018
World Best Brandy, Liqueur, Rum and Vodka announced 20 April 2018 For any questions, please email [email protected] Brandy Taste World's Best Brandy Viceroy 10 Years Old Best Apple E&J Distillers Apple Wine Extra Old Viceroy 10 Years Old Fruit E&J Distillers Peach Non Fruit Based E&J Distillers VS Wine Solera Torres 15 Wine Aged 2-3 Years Asbach Original Aged 3 Years Wine Aged 4-5 Years Meridian Brandy V.S.O.P. Category Winner Apple Aged E&J Distillers Apple Fruit No Age E&J Distillers Peach Non-Fruit-Based Aged E&J Distillers VSOP Non-Fruit-Based E&J Distillers VS Wine Brandy Aged 2-3 years Asbach Original Aged 3 Years Convict Flight of the Fish Eagle Aged 4-5 years KWV 5 Years Old Meridian Brandy V.S.O.P. Extra Old Alita XO Alvisa 10 Organic Brandy Stock 84 XO Viceroy 10 Years Old Solera Torres 15 Gold Wine Brandy Extra Old Jaime I KWV 10 Years Old Silver Wine Brandy Extra Old Torres 20 KWV KWV 15 KWV KWV 12 Richelieu 10 Years Old Vintage Brandy Bronze Wine Brandy Extra Old Van Ryn's 15 Years Old Fine Cask Reserve Van Ryn's 20 Years Old Collector's Reserve Klipdrift Gold Design World's Best Brandy Design Asbach Original Aged 3 Years Best New Launch Design Asbach Original Aged 3 Years Bronze New Launch Alvisa 10 Organic Brandy Liqueur Taste World's Best Liqueur Jefferson Amaro Importante Best Coffee Caffé Borghetti Spiced King's GingerGinger Liqueur Gin AbleforthsBathtub Gin - Sloe Gin Herbal Jefferson Amaro Importante Honey Hemp & Honey Shine Nut DiAmoreAmaretto Cream NegritaCream Rum Bundaberg Royal LiqueurCoffee & Chocolate -
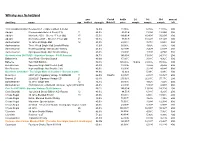
Whisky Aus Schottland Year Cask# Bottle 2Cl 5Cl 10Cl Amount Destillery Name Age Bottled Strength Batch # Price Sample Sample Sample Left
Whisky aus Schottland year Cask# bottle 2cl 5cl 10cl amount destillery name age bottled strength Batch # price sample sample sample left 1770 Glasgow DistilleryRelease Co Single No.1 Malt - Triple Distilled 0,5 Liter 46,0% 41,90 € 6,99 € 11,18 € 30cl Adelphi Glenborrodale Batch 8 Sherry 11y 11 46,0% 69,90 € 7,89 € 12,89 € 30cl Adelphi Mortlach, 2003 - Sherry 17 Year Old, 17 55,5% 189,90 € 16,46 € 30,03 € 10cl Adelphi Glenrothes 2007 - Sherry 13 Year Old 13 59,8% 99,70 € 10,02 € 17,14 € 10cl Auchentoshan 12 Jahre alt Single Malt 12 40,0% 29,00 € 3,87 € 5,94 € 40cl Auchentoshan Three Wood Single Malt Scotch Whisky 43,0% 39,90 € 4,65 € 7,50 € 40cl Auchentoshan Heartwood Single Malt Scotch Whisky 43,0% 32,99 € 3,45 € 5,10 € 40cl Auchentoshan Springwood Single Malt Scotch Whisky 40,0% 29,90 € 3,30 € 4,79 € 50cl Auchentoshan 2007/2020 - Signature Vintage - CS #1 Samurai 54,7% 149,90 € 13,61 € 24,31 € 20cl Ballantine's Hard Fired - Blended Scotch 40,0% 17,90 € 3,08 € 4,36 € 30cl Balvenie Tun 1509 Batch 6 50,4% 308,00 € 10,60 € 23,80 € 45,80 € 30cl Ben Bracken Speyside Single Malt Scotch (Lidl) 40,0% 19,90 € 3,22 € 4,64 € 60cl Ben Bracken Highland Single Malt Scotch (Lidl) 40,0% 19,90 € 3,22 € 4,64 € 60cl Ben Nevis 2013/2021 - The Single Malts of Scotland - Reserve Casks 48,0% 41,90 € 5,89 € 8,89 € 10cl Benrinnes 2007/ 2018 Signatory Vintage für ERMURI 11 46,0% 306478 59,95 € 6,08 € 10,36 € 60cl Braeval 21 2000/2021 Signatory Vintage CS 21 60,3% 239,90 € 20,04 € 37,17 € 20cl Bunnahabhain 12 Jahre Single Malt 12 46,3% 39,90 € 4,65 € 7,50 € 60cl Bunnahabhain PEATED 4 Jahre Battlehill (Duncan Taylor) 2014/2019 46,0% 49,90 € 5,36 € 8,93 € 20cl Caol Ila 2007/2020 - Signatur Vintage CS #8 Samurai 59,1% 149,90 € 13,61 € 24,31 € 20cl Cask Speyside 12y Limited Sherry Edition A.D.