7. Smart Power Integrated Circuit Technology
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Trade and Poverty Case Study: Small Household Appliances
Trade and Poverty Case Study: Small household appliances Taz Chaponda Matthew Stern Draft: March 2006 This case study is part of a broader study on trade and poverty in South Africa funded by DFID, DTI and USAID. Trade and Poverty Case Study: Small household appliances 1. Introduction This case study is part of a much larger research project on trade and poverty in South Africa. The overarching project borrows from the framework developed by McCulloch, Winters and Cirera (2001) to demonstrate the different channels through which trade can impact on poverty and economic development. In particular, the project tries to measure the impact on households from lower prices and changes in production and employment in the effected industries. This is achieved by quantitative analyses as well as five sector-specific case studies. In identifying sectors for case study analysis, the project team and reference group tried to strike a balance between the likely winners and losers of trade reform. The consumer appliance sector in general, and manufacturers of small household appliances in particular, were seen as possible beneficiaries of globalisation. South Africa manufactures a diverse range of small electrical appliances and local manufacturers have won significant export contracts in the USA and Europe (AMAP 2000). The recent financial performance of these companies is impressive and their brand presence within South Africa remarkably strong. Yet the case study reveals a surprising picture. The industry has, without doubt, been a major beneficiary of globalisation. Increased international competition has forced a substantial restructuring of the domestic industry and existing suppliers have become leaner, more focused and much more profitable. -

Small Appliances and the Web: a Budding Relationship by Perry James, the NPD Group, Inc
Quarters 2 & 3, 2011 Small Appliances and The Web: A Budding Relationship By Perry James, The NPD Group, Inc. echnology and the Internet are over- whelming forces in our lives, and Tthey play an increasing role in the way consumers make purchases and pur- chase decisions. The small appliance indus- try is not immune to this trend. Eight per- cent of units, and 12 percent of dollar sales, in the 12 months ending September 2011 were purchased through online channels. More than half of small appliance con- sumers did some kind of pre-purchase prod- About Housewares MarketWatch Housewares MarketWatch reports both point-of-sale (POS) and consumer data from NPD databases. The quarterly data covers various product categories within the divisions of Small Appliances and Non-electric Housewares. The information contained on the uct research. The Internet’s role in small adopted this purchasing vehicle more for following pages is offered as a snapshot appliance sales starts well before the pur- some categories than others. Looking at of a category’s performance, both from chase, when consumers are looking for the impact of the Internet by sub-industry, the retailer (POS) and consumer information to help them decide which 41 percent of all small appliance website perspectives. The POS data covers the product is right for them. Fourteen percent sales are home environment appliances. retail channels of mass/national chains, of items sold in the 12 months ending Website sales represent nearly 10 percent of department stores, specialty stores and September 2011, and 26 percent of dollar small kitchen electrics unit sales, 8 percent drug stores (personal care and home sales, were researched online first. -

Bishop & Associates Has Just Released an Eight Chapter Report
Bishop & Associates has just released an eight chapter report covering market trends and outlooks for the Consumer Electronic Products Market. The purpose of this report is to provide: A comprehensive set of baseline numbers on consumer electronic products – in units of equipment, by region of the world, that can be used to forecast connector companies TAM/SAM in applicable connector products. Input on Consumer Electronics (CE) equipment, across official market segments that operate in the consumer space: home appliance (expanded definition), home/home-office computer equipment, and consumer electronic products. Market segment connector TAMs in dollars for regions of the world. This report includes the following consumer-oriented electronic equipment: Equipment Markets in this Report Home Entertainment Equip: Computer/ Office Equip: Home Appliance/Other Camcorders Desktop/AIO PC Continued: Compact Audio Notebook/Netbook PC Outdoor Cooking Units Digital Still Cameras Copiers Retractable Awnings VCRs Fax Machines Water Heaters DVDs Ink Jet Printers Solar Hot Water Systems Home Theatre Equipment Laser Printers Window/Portable AC MP3/Media Players Other Printers Central AC Portable Stereos Gas Boilers Radios Housewares: Oil Furnaces Satellite Radio Receivers Personal Appliances Heat Pumps Web Access devices Housewares Geothermal Systems Tape Players Well Pumps,Water Conditioning Tel Answering Devices Home Appliance/Other: Solar Elec – Private Corded Tel Receivers Trash Compactors Solar Elec – Public Cordless Tel Receivers Dishwashers Wind Energy – Private Mobile/Cell Phones Disposers Wind Energy – Public Analog CRT TV Dryers Alarm Systems Digital CRT TV Washers Smart Thermostats LCD TV Freezers Home Broadband Equipment Plasma TV Refrigerators Public Broadband/WiMax Projection TV Ranges Jacuzzis TV Combos Range Hoods Swimming Pool Equipment Bishop and Associates, Inc. -
Electrical Service Requirements and Sample Load Calculations
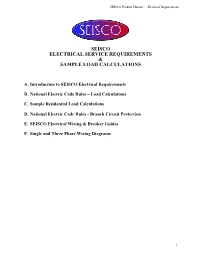
SEISCO Product Manual — Electrical Requirements SEISCO ELECTRICAL SERVICE REQUIREMENTS & SAMPLE LOAD CALCULATIONS A. Introduction to SEISCO Electrical Requirements B. National Electric Code Rules – Load Calculations C. Sample Residential Load Calculations D. National Electric Code Rules - Branch Circuit Protection E. SEISCO Electrical Wiring & Breaker Guides F. Single and Three Phase Wiring Diagrams 1 SEISCO Product Manual — Electrical Requirements A. Introduction to Seisco Electrical Requirements The Seisco is a flow-through electric water heater that generally requires more power (kW) to operate than an electric storage tank heater. The trade-off of using more power to heat with the Seisco, only as it is needed, proves to be a better alternative to using less power while heating a storage tank heater, whether you need it or not. The energy savings associated with the flow- through (or on-demand) technology of the Seisco versus storage tank heating is discussed in the Cost Comparison section of this manual. Like most electric storage tank water heaters, the Seisco heater requires 240 volts (AC) (or 208 VAC) to operate. Several Seisco heaters require multiple double pole circuits and breakers (see the chart below for 240 volt electrical ratings and requirements). Ratings for 208 volt commercial service and 208 volt ratings can be found in the Product Description & Specification section of this manual. CHART - SEISCO ELECTRICAL RATINGS Maximum Voltage Maximum Number of Number of Circuit Circuit Seisco Power Rating Rating Current Rating Circuits Breakers Breaker Size Model (kW) (VAC) (Amps) (Two Wire) (Double Pole) (Amps) RA-9 9 240 37.5 1 1 40 RA-11 11 240 46 1 1 50 RA-14 14 240 58 2 2 30 RA-18 18 240 75 2 2 40 RA-22 22 240 91 2 2 50 RA-28 28 240 116 4 4 30 Electrical Service: The Seisco heater is considered a non-continuous heating appliance according to the definitions in the National Electric Code, sections NEC 410 and 411. -

Global Growth Trends in Small Appliance Markets Udo Jansen Global Director Small Domestic Appliances
Global Growth Trends in Small Appliance Markets Udo Jansen Global Director Small Domestic Appliances April 2018 IFA Global Press Conference © GfK April 19, 2018 | Global Growth Trends in Small Appliance Markets 1 In 2017, the global Small Appliances Market, based on NPD`s and GfK`s retail panels, reached 65.2 billion USD Small Appliances (all monitored product groups) – Global Panelmarket – 2017 . Hot beverage makers . Electric water kettles . Food preparation . Rice cookers . Toasters 65.2 . Juicers . Fun cooking . Mini ovens billion USD . Deep fryers . Barbecues . Shavers . Hair dryers . Hair stylers . Irons . Vacuum cleaners +8% . Steam Cleaner . Air treatment vs. 2016 . Electrical fans (constant currency) . Electrical heating … … and more Source: GfK- and NPD Point-of-Sale Tracking © GfK April 19, 2018 | Global Growth Trends in Small Appliance Markets 2 Innovation © GfK April 19, 2018 | Global Growth Trends in Small Appliance Markets 3 Global SDA market1 is driven by innovations and smart appliances. New products make the everyday life of consumers easier. SDA total | World Panelmarket | Sales billion € 11 32 37 Hot water dispenser 96 103 44 Personal scales with Mobile Connect. 7.1 billion 128 185 51 Foodpreparation with shredder 296 Massage mat 336 68 Espresso Full. with Mobile Connect 1.882 mn 415 Trad. filtercoffee with int. coffee grinder 477 Hybrid Groomer Window cleaner 510 Waterjet solo (Dental Care) Toothbrush Rech. with Mobile Connect. 27,7 billion 38,4 billion Slow juicers 1364 Laser/IPL hair removal Electrical cooking pots Foodpreparation with cooking function 2926 Hot Air Fryers Robot vacuum cleaners 2012 2017 Handstick rechargeable vac cleaners 1 Without U.S. -

Pakistan's Household Appliances Industry
Household Appliances An Overview © The Pakistan Credit Rating Agency Limited. February 2021 TABLE OF CONTENTS Contents Page No. Contents Page No. Introduction 1 Working Capital Management 13 Global Industry | Overview 2 Financial Risk 14 Local Industry | Overview 4 Regulatory Environment 15 Demand 5 Rating Curve 16 Supply 8 SWOT Analysis 17 Production of Major Appliances 10 Outlook & Future Prospects 18 Business Risk 11 Bibliography 19 Margins & Cost Structure 12 HOUSEHOLD APPLIANCES | INTRODUCTION • Household Appliances, also referred to as home/domestic appliances, include machines and electrical equipment* that are used in assisting various household functions such as cooking, cleaning, food preservation, etc. • Based on their type, Household Appliances can be broadly classified into two categories; Major Appliances & Small Appliances. Major Appliances include high valued electrical equipment such as Refrigerators, Freezers, Air-Conditioners, Washing Machines, Ovens, etc. Small Appliances include products like Coffee/Tea Makers, Food Processors, Grills & Toasters, Vacuum Cleaners, etc. *Plastics and wooden material are not included 1 HOUSEHOLD APPLIANCES | GLOBAL OVERVIEW Overview • Size: The global Household Appliance market was valued at USD~442bln in CY20 (USD~524bln in CY19), a contraction of ~16% during the period owing to the Covid-19 pandemic. • Revenue Mix: The Major Appliances segment is the largest segment by revenue in the Household Appliance market, and accounts for over ~60% of the market’s total revenue, but less than ~20% of the volume sales. On the other hand, Small Appliances is the largest segment in terms of volume sales, but accounts for a smaller portion in the total revenue. Small Appliance Market is further sub-segmented into Small Kitchen Appliance segment which accounts for ~49% of the Small Appliance revenue. -

JS Global Lifestyle (1691
4 Feb 2020 CMB International Securities | Equity Research JS Global Lifestyle (1691 HK) BUY (Initiation) Cross -selling with world-class tech and style Target Price HK$7.65 Up/Downside +48.0% Current Price HK$5.17 JS Global is the 3rd/ 2nd largest in China/ US with 8.8%/ 8.1% small appliance market share. JS global has three major brands (Joyoung, Shark and Ninja) which focus on cleaning, food preparation and cooking appliances, and generated a sales of USD 2.7bn and net profit of USD 112mn in FY18. China Home Appliance Sector Emphasis on R&D to solve consumers’ pain points. JS Global is dedicated on R&D and innovation as solving consumer pain point is a proven growth Walter Woo driver. In FY18, it spent ~USD 119mn on R&D, ~4.4% of sales (peers’ avg. is (852) 3761 8776 4.9%), and had a team of ~800, ~20% of total (peers’ avg. is 12%). We believe [email protected] recent launches: revolutionary products - 1) Multifunctional steamer S5 (2019), 2) Ninja Foodi series (2018) and evolutionary products - 3) Premium soymilk Stock Data maker K-series, 4) High-performance multifunctional blender Y88 (2019), 5) Mkt Cap (HK$ mn) 17,615 Robot vacuum Shark ION (2017) can boost growth in FY18-21E. Avg 3 mths t/o (HK$ mn) 6.80 52w High/Low (HK$) 5.95/4.69 Cross-selling in product, region, price point. Acquisition of SharkNinja in Total Issued Shares (mn) 3,407.2 2017, in our view, can unlock huge potential by leveraging existing products Source: Bloomberg and sales network, like: 1) expanding Shark & Ninja into rest of the world (e.g. -

Shimizu Town Hall Department of Public Affairs TEL: 0156–62-1151
○ Separation & Disposal Methods Due to the ① Garbage separation & disposal p. 1 ② Designated trash bags & labels p. 2 merger of the (prices and contributing stores) Tokachi Area ③ Burnable and unburnable garbage p. 3 Complex ④ Recyclable materials p. 4 Administrative (separation and disposal) Association, ⑤ Recyclable materials p. 5 from April (Used clothing/garments, small 2019 the scale appliances) ⑥ Large scale garbage disposal p. 6-8 method of Transportation of p. 9-10 disposal will household garbage to be changed. the Kuririn Center ⑦ Non-disposable & healthcare items p. 11-12 Let’s recycle correctly! ⑧ What are the 5R’s? (Do you know?) p. 13 ⑨ 4 practices for waste reduction p. 14 - 16 ○ Garbage Separation Encyclopedia SAVE Alphabetical p. 17-42 【June 2020】 Shimizu Town Hall Department of Public Affairs TEL: 0156–62-1151 p. 0 ● Reducing waste for ECO friendly living! Since April, 2003, the town of Shimizu has charged for the collection of garbage, and with the cooperation of its residents has promoted the separation and effective utilization of recyclable materials. As of April, 2019, the Shimizu office of waste management joined the Tokachi Area Complex Administrative Association and will jointly process all materials at the Kuririn Center in Obihiro. Please take note that some of the prior sorting and loading methods have changed. Furthermore, by reducing the amount of burnable and unburnable garbage, we will simultaneously create a sustainable environment while promoting the “less garbage = eco-friendly” lifestyle. Tips for an eco-friendly living have also been included, so please use them! ● Overview of recycling and disposal methods CLASSIFICATION Classification Types Example Products Burnable items Wooden products, miscellaneous paper, Burnable ① Feminine hygiene products, cat litter, pet waste, underwear, (COST: designated bag) Fish bones, shellfish, meat, produce, food waste unburnable items Glass items, tin foil, leather goods, rubber goods, etc. -

Standby and Baseload in New Zealand Houses: a Nationwide Statistically Representative Study
Standby and Baseload in New Zealand Houses: A Nationwide Statistically Representative Study Michael Camilleri, Nigel Isaacs, and Lisa French, BRANZ Ltd. ABSTRACT For the first time, a nationwide statistically representative study of standby and baseload energy consumption has been completed in New Zealand. This is based on the data collected for the Household Energy End-use Project (HEEP). The baseload of a house is the typical lowest power consumption when everything that is usually switched off is off, and was on average (112±4) W. This baseload represents the upper limit for the standby power consumption. Standby power consumption was estimated at (57±4) W, heated towel rail use at (21±2) W, and faulty refrigeration appliances (compressors always on) at (15±10) W. Some appliances with standby, and some small continuous loads that are known to be excluded, make up another (11±4) W leaving (8±12) W unaccounted. This represents a very nearly complete inventory of standby power consumption for New Zealand houses. It is unlikely that any major standby appliances are left unaccounted. Introduction Standby power is drawn by an appliance when it is not in operation but is connected to the mains. This can range from zero (e.g. a non-electronic clothes dryer) to 20 W or more (e.g. a television). These power levels may seem trivial (1 W continuous power is approximately 9 kWh per year), but since most households have many such appliances, the actual energy consumption is usually a significant fraction of the total energy consumption of a household. Standby mode is defined in the NZ standard (AS/NZ62301:2005, 2) as: The lowest power consumption mode which cannot be switched off (influenced) by the user and may persist for an indefinite time when an appliance is connected to the main electricity supply and used in accordance with the manufacturer’s instructions. -
CESA Product Guide
CESA Canadian Electrical Stewardship Association Program Product Guide Revised: May 2020 Contact [email protected] www.electrorecycle.ca 1-877-670-CESA (2372) Canadian Electrical Stewardship Association | Program Product List – May 2020 CESA Program Product List The following document provides a list of product categories and examples of products captured by the CESA small appliance recycling program. The program began with categories 1-11 on October 1, 2011 and expanded to include categories 12-17 on July 1, 2012. For details on the CESA program, please refer to www.electrorecycle.ca. Environmentally Handling Fees (EHFs) for each product category can be found in the summary table below, as well as throughout the product list. Please email [email protected] for any further questions or comments. EHF Per Unit EHF Per Unit until Product Category October 1, 2018 September 30, 2018 1. Kitchen Countertop – Motorized Appliances $ 0.50 $ 0.50 2. Kitchen Countertop – Heating Appliances $ 0.80 $ 0.80 3. Kitchen Countertop – Heating Appliances (coffee/tea) $ 0.70 $ 0.70 4. Microwave Ovens $ 5.00 $ 6.25 [previously Microwaves (large) and Microwaves (small) categories] 5. Time Measurement & Display Devices $ 0.20 $ 0.40 6. Weight Measurement $ 0.30 $ 0.40 7. Garment Care Appliances $ 0.60 $ 0.70 8. Air Treatment Appliances $ 0.95 $ 1.00 [previously Air Treatment Appliances, Desk & Tabletop Fans categories] 9. Personal Care Appliances $ 0.25 $ 0.40 10. Full-size Floor Cleaning Appliances $ 2.50 $ 2.50 11. Smaller Floor/Surface Cleaning Appliances $ 0.50 $ 0.50 12. Test and Measurement Tools $ 0.35 $ 0.50 13. -

Owner's Manual and Installation Instructions
Safety Information ................................ 2-6 Owner's Manual and Installation Instructions Operating Instructions Coil Top and Ceramic Top Models Surface Units ......................................... 7-8 REX242W Cookware .................................................. 9 REX243B Controls .................................................... 10 Oven ................................................... 11, 12 Clock, Timer and Convenience Outlet .............................................................. 13, 14 Timed Baking and Roasting ................. 15 Special Features ............................... 16-18 Sabbath Features ............................ 19, 20 Temperature Conversions .................... 20 Thermostat .............................................. 21 Self Clean .......................................... 22, 23 Care and Cleaning ......................... 24-30 Installation Instructions .................... 31-39 Troubleshooting Tips ......................... 40-44 Accessories ............................................. 45 Warranty .................................................. 47 Write the model and serial numbers here: Model # Serial # You can find them on a label Felix Storch, Inc. Summit Appliance Division behind the storage drawer on Bronx, New York 10474 the oven frame. www.summitappliance.com 1 IMPORTANT SAFETY INFORMATION. READ ALL INSTRUCTIONS BEFORE USING. WARNING! READ ALL SAFETY INSTRUCTIONS BEFORE USING THE PRODUCT. FAILURE TO FOLLOW THESE INSTRUCTIONS MAY RESULT IN FIRE, ELECTRIC Safety -

Prestidigitations: Interfacing with Palm-Sized Media Gadgets
| 45 Heike Weber PRESTIDIGITATIONS: INTERFACING WITH PALM-SIZED MEDIA GADGETS People cannot be understood without their things and the way they interact with them. In the case of media technology, interfaces are the site where this interaction takes place: displays allow for viewing, loudspeakers for listening, and the user has to be confident with many operating and control knobs to manipulate the technical parts. In a recent publication, Nokia engineers even stated, that ‘(...) the heads of the superpowers, industry and the consumer, meet in a user interface’.1 In recent years, Nokia has become notorious for its user- friendly designs, and accordingly, this publicised user-centeredness is mainly materialised in interfaces. As the above quote suggests, they are defined as the linchpin in user-machine interaction and thus drive future technology’s develop- ment. While a conscious interface design is certainly characteristic of the end of the 20th century – since digital technology has turned interfaces into surfaces that are rather open to personal appropriation – it should be noted that former producers of media technologies deliberately designed subtle interfaces that ultimately changed our interactions as well as our relationship with technology. Interfaces both enable and restrict our interaction with technology, and they represent those parts of media technology users ultimately come in touch with while accessing the actual media content. By incorporating technology into their daily routines, users not only have appropriated technology but also adjusted their own gestures to be able to interact with new interface designs. Moreover, changing interfaces also reflect shifts in our interpretations of technology. This article focuses on mobile electronic media technology, now commonly dubbed as ‘gadgets’.