Bioinspired Design of Flexible Armor Based on Chiton Scales
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Polyplacophora (Mollusca)
BASTERIA44: 69-70, 1980 in On two preoccupied names Polyplacophora (Mollusca) R.A. van Belle Nijverheidsstraat 22, B-2700 Sint-Niklaas, Belgium of continuation of the While preparing a catalogue fossil Polyplacophora, as a logical already published ”Catalogue of living chitons” (Kaas & Van Belle, 1980), two minor nomenclatorial have attention. problems come to my conradi nov. Chiton 1856, 1847. 1. Chiton nom. pro antiquus Conrad, non Reeve, The used for the first time Conrad in Morton name Chiton antiquus was by (1834: 6), of the United States. in the list of fossil shells of the Lower Tertiary or Eocene period As Chiton Conrad no indication whatsoever is given about that species, antiquus in Morton, is nudum. 1834, definitely a nomen established well-definedChiton Reeve 25, and a from (1847: pi. sp. fig. 169) antiquus known Australia. This recent and common species is now as Callistochiton antiquus (Reeve, 1847). Conrad his a fossil Afterwards, (1856: 266) published a diagnosis for Chiton antiquus, of species from the Eocene of Claiborne, Alabama. Whatever the present generic status Chiton 1856, the name is a ofChiton antiquus Conrad, may be, junior homonym antiquus of author the name Chiton Reeve, 1847, and must be replaced. In honour its I propose conradi. bohemicus De Rochebrune, 1883, 2. Chiton rudelsdorfensis nom. nov. pro Gymnoplax non Chiton bohemicus Barrande, 1867. fossil Barrande (1867: 175, pi. 16 figs. 19-28) namedand figured Chiton bohemicus a from the Silurian of known as Chelodes bohemicus species Bohemia, now (Barrande, 1867). created the bohemicus for the De Rochebrune (1883: 63) name Gymnoplax fossil species from the Middle Miocene of Rudelsdorf, Bohemia, Reuss (1860: 257, pi. -

The Coastal Molluscan Fauna of the Northern Kermadec Islands, Southwest Pacific Ocean
Journal of the Royal Society of New Zealand ISSN: 0303-6758 (Print) 1175-8899 (Online) Journal homepage: http://www.tandfonline.com/loi/tnzr20 The coastal molluscan fauna of the northern Kermadec Islands, Southwest Pacific Ocean F. J. Brook To cite this article: F. J. Brook (1998) The coastal molluscan fauna of the northern Kermadec Islands, Southwest Pacific Ocean, Journal of the Royal Society of New Zealand, 28:2, 185-233, DOI: 10.1080/03014223.1998.9517560 To link to this article: http://dx.doi.org/10.1080/03014223.1998.9517560 Published online: 30 Mar 2010. Submit your article to this journal Article views: 405 View related articles Citing articles: 14 View citing articles Full Terms & Conditions of access and use can be found at http://www.tandfonline.com/action/journalInformation?journalCode=tnzr20 Download by: [86.95.75.143] Date: 27 January 2017, At: 05:34 © Journal of The Royal Society of New Zealand, Volume 28, Number 2, June 1998, pp 185-233 The coastal molluscan fauna of the northern Kermadec Islands, Southwest Pacific Ocean F. J. Brook* A total of 358 species of molluscs (excluding pelagic species) is recorded here from coastal marine habitats around the northern Kermadec Islands. The fauna is dominated by species that are widely distributed in the tropical western and central Pacific Ocean. The majority of these are restricted to the tropics and subtropics, but some range south to temperate latitudes. Sixty-eight species, comprising 19% of the fauna, are thought to be endemic to the Kermadec Islands. That group includes several species that have an in situ fossil record extending back to the Pleistocene. -

Molluscan Studies
Journal of The Malacological Society of London Molluscan Studies Journal of Molluscan Studies (2013) 79: 372–377. doi:10.1093/mollus/eyt029 Advance Access publication date: 23 August 2013 RESEARCH NOTE EGG-HULL ULTRASTRUCTURE OF ISCHNOCHITON STRAMINEUS (SOWERBY, 1832), A SOUTH AMERICAN BROODING CHITON (CHITONINA: ISCHNOCHITONIDAE) Marı´a G. Liuzzi1 and Diego G. Zelaya2 1Divisio´n Invertebrados, Museo Argentino de Ciencias Naturales, CONICET, A´ngel Gallardo 470, Buenos Aires (C1405DJR), Argentina; and 2Departamento Biodiversidad, Facultad de Ciencias Exactas y Naturales, Universidad de Buenos Aires, CONICET, Argentina Correspondence: M.G. Liuzzi; e-mail: [email protected] Reproductive aspects of the life history of chitons have been rela- Celebron˜a(¼Kidney) Island, Malvinas/Falkland Islands tively little studied in comparison with some morphological (518370S–578450W). Thirty-eight eggs were removed from the characters, such as valve morphology, girdle scales and radulae, pallial groove, dehydrated in an ascending ethanol series (from which have historically been considered of taxonomic value. In 70 to 100%), dried in an EMS 850 critical-point dryer using recent times, however, some authors have pointed out that char- liquid CO2, coated with gold-palladium (40–60%) and photo- acters related to reproduction, such as egg-hull morphology, are graphed with a Phillips XL-30 scanning electron microscope. also valuable for taxonomic purposes (Eernisse, 1988; Hodgson One juvenile was dehydrated and photographed in the same et al., 1988; Sirenko, 1993; Pashchenko & Drozdov, 1998; Okusu way as the eggs, but treated with hexamethyldisilazane and air et al., 2003; Buckland-Nicks, 2006, 2008; Sirenko, 2006a; dried instead of critical-point dried. -

Illustrated Summary of Chiton Terminology
©Zoologische Staatssammlung München/Verlag Friedrich Pfeil; download www.pfeil-verlag.de SPIXIANA 33 2 171–194 München, November 2010 ISSN 0341–8391 Illustrated summary of chiton terminology (Mollusca, Polyplacophora) Enrico Schwabe Schwabe, E. 2010. Illustrated summary of chiton terminology (Mollusca, Poly- placophora). Spixiana 33 (2): 171-194. The aims of the present paper are to summarize and offer a standard set of ter- minology used to describe morphological and partly anatomical (e. g. the radula) characters of Polyplacophora. To make the understanding of some previously misused terms easier, the identification and description of relevant parts of the animal are illustrated and discussed in context of additional literature. Enrico Schwabe, Bavarian State Collection of Zoology, Muenchhausenstr. 21, 81247 Munich, Germany; e-mail: [email protected] Introduction “An den Tentakeln des Kopfes befinden sich Riech- organe [On the tentacles of the head there are Chitons are a group of basal, exclusively marine olfactory organs.].” However, chitons do not have molluscs, which have not significantly changed cephalic tentacles at all, and certainly not olfactory their bauplan during more than 300 million years tentacles! of evolution. Their more or less solid, dorsal plates This short contribution intends to clarify the termi- have been preserved in numerous fossil records and nology of chitons and to present a detailed general allow researchers a direct comparison with living description of chiton morphology, to summarise for species, and accordingly there is a high number amateurs, students or scientists the present stage of described fossil and recent taxa. At present we of scientific knowledge of a fascinating group of count for about 930 recent species (see Schwabe animals. -

New Outlook on the System of Chitons (Mollusca: Polyplacophora)*
VENUS 65 (1-2): 27-49, 2006 Review New Outlook on the System of Chitons (Mollusca: Polyplacophora)* Boris Sirenko Zoological Institute of the Russian Academy of Sciences, Universitetskaya nab.1, St. Petersburg 199034, Russia; [email protected] Abstract: In order to build a natural classification of the chitons, a new approach is proposed that uses not only the shells, as usual, but also other suitable features including aesthetes, girdle, radula, gills, glands, egg hull projections, spermatozoids etc. Several previous classifications are discussed. A brief review of the evolution of the Polyplacophora is given and a new classification of the chitons is proposed. The roles of the articulamentum and the reductions in the tegmentum in chitons are discussed. The evolutionary line of the reduction of slits is shown for the superfamily Cryptoplacoidea. Specifically, the genera Hemiarthrum, Weedingia and Choriplax, which have unslitted valves, have been removed from the order Lepidopleurida and reassigned to the order Chitonida within the Cryptoplacoidea. Affinities of these and other genera within the Cryptoplacoidea are discussed. Keywords: Polyplacophora, taxonomy, evolution, articulamentum, reduction of tegmentum Introduction Creating classifications at its best is all about searching for phylogenetic affinities. The described natural system is a reflection of our ideas about affinities, expressed with the aid of a hierarchy of taxa. In the words of Darwin (1873): “...that Natural System is founded on descent with modification; - that the characters which naturalists consider as showing true affinity between any two or more species, are those which have been inherited from a common parents...all true classification being genealogical; - that community of descent is the hidden bond which naturalists have been unconsciously seeking...” For the early classifications of chitons, naturalists usually used a single or a few characters and their classifications were thus artificial. -
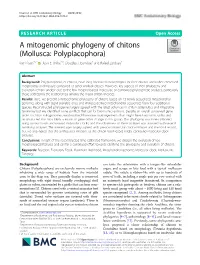
A Mitogenomic Phylogeny of Chitons (Mollusca: Polyplacophora) Iker Irisarri1,2* , Juan E
Irisarri et al. BMC Evolutionary Biology (2020) 20:22 https://doi.org/10.1186/s12862-019-1573-2 RESEARCH ARTICLE Open Access A mitogenomic phylogeny of chitons (Mollusca: Polyplacophora) Iker Irisarri1,2* , Juan E. Uribe1,3, Douglas J. Eernisse4 and Rafael Zardoya1 Abstract Background: Polyplacophora, or chitons, have long fascinated malacologists for their distinct and rather conserved morphology and lifestyle compared to other mollusk classes. However, key aspects of their phylogeny and evolution remain unclear due to the few morphological, molecular, or combined phylogenetic analyses, particularly those addressing the relationships among the major chiton lineages. Results: Here, we present a mitogenomic phylogeny of chitons based on 13 newly sequenced mitochondrial genomes along with eight available ones and RNAseq-derived mitochondrial sequences from four additional species. Reconstructed phylogenies largely agreed with the latest advances in chiton systematics and integrative taxonomy but we identified some conflicts that call for taxonomic revisions. Despite an overall conserved gene order in chiton mitogenomes, we described three new rearrangements that might have taxonomic utility and reconstructed the most likely scenario of gene order change in this group. Our phylogeny was time-calibrated using various fossils and relaxed molecular clocks, and the robustness of these analyses was assessed with several sensitivity analyses. The inferred ages largely agreed with previous molecular clock estimates and the fossil record, but we also noted that the ambiguities inherent to the chiton fossil record might confound molecular clock analyses. Conclusions: In light of the reconstructed time-calibrated framework, we discuss the evolution of key morphological features and call for a continued effort towards clarifying the phylogeny and evolution of chitons. -
Instruction Manual Version 8
International bottom trawl survey in the Mediterranean Instruction manual Version 8 2016 MEDITS-Handbook. Version n. 8, 2016, MEDITS Working Group : 177 pp. 2 The MEDITS programme is conducted within the Data Collection Framework (DCF) in compliance with the Regulations of the European Council n. 199/2008, the European Commission Regulation n. 665/2008 the Commission Decisions n. 949/2008 and n. 93/2010. The financial support is from the European Commission (DG MARE) and Member States. This document does not necessarily reflect the views of the European Commission as well as of the involved Member States of the European Union. In no way it anticipates any future opinion of these bodies. Permission to copy, or reproduce the contents of this report is granted subject to citation of the source of this material. MEDITS Survey – Instruction Manual - Version 8 3 Preamble The MEDITS project started in 1994 within the cooperation between several research Institutes from the four Mediterranean Member States of the European Union. The target was to conduct a common bottom trawl survey in the Mediterranean in which all the participants use the same gear, the same sampling protocol and the same methodology. A first manual with the major specifications was prepared at the start of the project. The manual was revised in 1995, following the 1994 survey and taking into account the methodological improvements acquired during the first survey. Along the years, several improvements were introduced. A new version of the manual was issued each time it was felt necessary to make improvements to the previous protocol. In any case, each time the MEDITS Co-ordination Committee ensured that amendments did not disrupt the consistency of the series. -

Chitons (Mollusca, Polyplacophora) from Rapa, the Southernmost Island of Polynesia
Chitons (Mollusca, Polyplacophora) from Rapa, the southernmost island of Polynesia Enrico SCHWABE Zoologische Staatssammlung München, Münchhausenstrasse 21, D-81247 Munich (Germany) [email protected] Pierre LOZOUET Muséum national d’Histoire naturelle, Département Systématique et Évolution, case postale 51, 55 rue Buffon, F-75231 Paris cedex 05 (France) [email protected] Schwabe E. & Lozouet P. 2006. — Chitons (Mollusca, Polyplacophora) from Rapa, the southernmost island of Polynesia. Zoosystema 28 (3) : 617-633. ABSTRACT Th e RAPA 2002 workshop permitted the fi rst comprehensive collection of polyplacophorans from the island of Rapa (Austral Islands, South Pacifi c) to be made. Th e collection includes three genera and three species, two of the species being new to science. Th e isolation of Rapa may explain the uniqueness of this small polyplacophoran fauna. Th e two new species are: Leptochiton hiriensis n. sp. and Chiton (Rhyssoplax) rapaitiensis n. sp. Th e latter species, which is the most common (83% of the specimens), is a brooder. Leptochiton hiriensis n. sp. diff ers from congeneric species of the same size in the sculpture of the valves, which show concentric growth marks in the central area and concentrically arranged nodules in the head valve, postmucronal region of the tail valve and the lateral areas. Chiton (Rhyssoplax) rapaitiensis n. sp. is compared to the related species C. (R.) linsleyi (Burghardt, 1973), C. (R.) rhynchotus (de Rochebrune, 1884), and C. (R.) maldivensis (E. A. Smith in Gardiner, 1903). In addition to its smaller size, the new species diff ers in tegmental sculpture and in the ornamentation KEY WORDS Mollusca, of the dorsal girdle scale. -

(Mollusca, Polyplacophora) from the Maldive Islands
Zootaxa 2673: 1–38 (2010) ISSN 1175-5326 (print edition) www.mapress.com/zootaxa/ Article ZOOTAXA Copyright © 2010 · Magnolia Press ISSN 1175-5334 (online edition) Chitons (Mollusca, Polyplacophora) from the Maldive islands BRUNO DELL’ANGELO1,5, SANDRO GORI², LEONARDO BASCHIERI³ & ANTONIO BONFITTO4 ¹Via Santelia 55/12A, 16153 Genova, Italy. E-mail: [email protected] ²Via Sernesi 7, 57123 Livorno, Italy ³Via Boccaletti 15, 41012 Carpi (Modena), Italy 4Dipartimento di Biologia evoluzionistica e sperimentale, Via Selmi 3, 40126 Bologna, Italy 5Corresponding author Table of contents Abstract ............................................................................................................................................................................... 2 Introduction ......................................................................................................................................................................... 2 Material and methods .......................................................................................................................................................... 3 Polyplacophora of Maldive—historical background .......................................................................................................... 5 Systematics .......................................................................................................................................................................... 5 Class Polyplacophora Gray, 1821 ...................................................................................................................................... -
Systematic List of the Marine Molluscs of Tasmania(PDF, 9MB)
A SYSTEMATICLIST oF THEMARINE MOLLUSCS OFTnSMANIA StmorlJ.GnovE, RoN C.KrnsHAW, Bnrnru J.SvmH AND ElrzRserHTunrurn Julv 2006 tTr QueenVictoria Museum lasmanla gY andArt Gallery Tis"v rrNNAtitll lsli-tllll mi,ltrlT fi Al "l.f I.AUNCESTON SimonGrove QueenVictoria Museum and Art Gallery OccasionalPaper No. I (2006) Publishedby the Queen Victoria Museum and Art Gallery POBox 403 LAUNCESTONTas 7250 Australia Tel:03-6323 3777 Fax:03-6323 3776 www.qvmag.tas.gov.au O S.J.Grove, Queen Victoria Museum and Ar1 Gallery and Tasmanian Museum and Art Gallery Frontcover photo: Two marinemolluscs common on Tasmania'sshores - the chiton Sypharochitonpelliserpentis and the mussel Mytilus galloprovincialisplanulatus. Taroona, Tasmania.Photo: Simon Grove. -<ysternatjc -ijsa of ;ie marj.e,?o-z-iuscs af rasmanja, o s.,j. Grove, evMAG & TI{AG 2006. A SvsrEMATrcLrsr oF THpMannqp Monuscs op TaSMANTA SrvtoNJ.Gnovet, RoN C.Kgnsrnw', BRIANJ.SvrrH2 AND ErtzeeErr TuRNpR3 Aucusr 2006 1' 25 TaroonaCrescent, Taroona, Tasmania7}53. 'Late of the Queen Victoria Museum and Art Gallery, Wellington Street, Launceston,Tasmania 7250. t TasmanianMuseum andArt Gallery,GPO Box 1164, Hobart, Tasmania 7001 . TrtTSPUBLICATIoN IS DEDICATEDTo THEMEMoRIES oF RONKpnsHaw AND BrueN Surrrl CoxrpNrs IxrRonucrroN ......1 AplacoPHoRA ............4 POLYPLACOPHORA .....4 BryervrA.... ......6 ScnpsoPoDA ......20 CppseroPoDA .............21 GasrnoPoDA ......24 RereReNCELrsr ...........62 Ixosx op GpxpRA.SUBGENERA AND Spgcrps ...........64 A systenatjc -ljst af the marine.no-l-luscs of Tasnania. O S.J. crove, QVMAG& TMAG 2006. IxrnonUCTIoN This publicationcomprises a taxonomiclisting of the marinemolluscs currently recognisedas occurring in Tasmania. The defrnitionof Tasmaniaused here comprises all parts of the coast and islandsof the Stateof Tasmania,plus surroundingoffshore waters, extending south to the SouthTasman Rise. -

New Data from Monoplacophora and a Carefully-Curated Dataset Resolve Molluscan Relationships Kevin M
www.nature.com/scientificreports OPEN New data from Monoplacophora and a carefully-curated dataset resolve molluscan relationships Kevin M. Kocot 1*, Albert J. Poustka2,3, Isabella Stöger4,5, Kenneth M. Halanych 6 & Michael Schrödl4,5,7 Relationships among the major lineages of Mollusca have long been debated. Morphological studies have considered the rarely collected Monoplacophora (Tryblidia) to have several plesiomorphic molluscan traits. The phylogenetic position of this group is contentious as morphologists have generally placed this clade as the sister taxon of the rest of Conchifera whereas earlier molecular studies supported a clade of Monoplacophora + Polyplacophora (Serialia) and phylogenomic studies have generally recovered a clade of Monoplacophora + Cephalopoda. Phylogenomic studies have also strongly supported a clade including Gastropoda, Bivalvia, and Scaphopoda, but relationships among these taxa have been inconsistent. In order to resolve conchiferan relationships and improve understanding of early molluscan evolution, we carefully curated a high-quality data matrix and conducted phylogenomic analyses with broad taxon sampling including newly sequenced genomic data from the monoplacophoran Laevipilina antarctica. Whereas a partitioned maximum likelihood (ML) analysis using site-homogeneous models recovered Monoplacophora sister to Cephalopoda with moderate support, both ML and Bayesian inference (BI) analyses using mixture models recovered Monoplacophora sister to all other conchiferans with strong support. A supertree approach also recovered Monoplacophora as the sister taxon of a clade composed of the rest of Conchifera. Gastropoda was recovered as the sister taxon of Scaphopoda in most analyses, which was strongly supported when mixture models were used. A molecular clock based on our BI topology dates diversifcation of Mollusca to ~546 MYA (+/− 6 MYA) and Conchifera to ~540 MYA (+/− 9 MYA), generally consistent with previous work employing nuclear housekeeping genes. -

Additions to the Mollusca from Kawerua, North Auckland
Tane 35: 183 - 193 (1995) ADDITIONS TO THE MOLLUSCA FROM KAWERUA, NORTH AUCKLAND by Bruce W. Hayward, Margaret Morley, Jenny Riley, Nancy Smith and Glenys Stace Auckland Institute and Museum, Private Bag 92018, Auckland SUMMARY Seventy new records of Mollusca (7 chitons, 41 gastropods, 22 bivalves) are added to the existing species list for the Kawerua area, on the west coast of North Auckland, bringing the total to 192 species (13 chitons, 125 gastropods, 51 bivalves, 3 cephalopods). These Kawerua records provide geographic range extensions for 21 species of mollusc. INTRODUCTION Hayward (1990) recorded 123 species of Mollusca from marine and freshwater habitats around the Auckland University Field Club Research Station at Kawerua, on the west coast of Northland, New Zealand (Fig. 1). This paper records additions to the list resulting from a three day visit and intensive intertidal search along the Kawerua coast by the authors in June 1993. Although the original list included records from along 8km of coast between the mouths of the Waipoua and Wairau Rivers, the additions all come from a 3km stretch from the Waiotane Stream mouth to the Ohae Stream mouth. New records and many of the existing records are now supported by voucher specimens in the collections of the Auckland Institute and Museum. MOLLUSC SPECIES LIST Habitat where found: B = intertidal boulder beach F = freshwater stream P = pelagic R = on or around coastal rocks S = exposed sandy beach W = in wood Double letter = common 183 Nomenclature follows Powell (1979) and Beu and