Rpi Beam Profiler
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Beam Profiling by Michael Scaggs
Beam Profiling by Michael Scaggs Haas Laser Technologies, Inc. Introduction Lasers are ubiquitous in industry today. Carbon Dioxide, Nd:YAG, Excimer and Fiber lasers are used in many industries and a myriad of applications. Each laser type has its own unique properties that make them more suitable than others. Nevertheless, at the end of the day, it comes down to what does the focused or imaged laser beam look like at the work piece? This is where beam profiling comes into play and is an important part of quality control to ensure that the laser is doing what it intended to. In a vast majority of cases the laser beam is simply focused to a small spot with a simple focusing lens to cut, scribe, etch, mark, anneal, or drill a material. If there is a problem with the beam delivery optics, the laser or the alignment of the system, this problem will show up quite markedly in the beam profile at the work piece. What is Beam Profiling? Beam profiling is a means to quantify the intensity profile of a laser beam at a particular point in space. In material processing, the "point in space" is at the work piece being treated or machined. Beam profiling is accomplished with a device referred to a beam profiler. A beam profiler can be based upon a CCD or CMOS camera, a scanning slit, pin hole or a knife edge. In all systems, the intensity profile of the beam is analyzed within a fixed or range of spatial Haas Laser Technologies, Inc. -

Simultaneous Intensity Profiling of Multiple Laser Beams Using the Bladecam-XHR Camera
Simultaneous Intensity Profiling of Multiple Laser Beams Using the BladeCam-XHR Camera Shaun Pacheco College of Optical Sciences, University of Arizona Rongguang Liang College of Optical Sciences, University of Arizona Rocco Dragone Vice President of Engineering, DataRay, Inc. Real-Time Profiling of Multiple Laser Beams There are several applications where the parallel processing of multiple beams can significantly decrease the overall time needed for the process. Intensity profile measurements that can characterize each of those beams can lead to improvements in that application. If each beam had to be characterized individually, the process would be very time consuming, especially for large numbers of beams. This white paper describes how the BladeCam-XHR can be used to simultaneously measure the intensity profile measurements for multiple beams by measuring the diffraction pattern from a diffraction grating and the intensity profile from a 3x3 fiber array focused using a 0.5 NA objective. Diffraction Gratings Diffraction gratings are periodic optical components that diffract an incident beam into several outgoing beams. The grating profile determines both the angle of the diffracted beam modes and the efficiency of light sent into each of those modes. Grating fabrication errors or a change in the incident wavelength can significantly change the performance of a diffraction grating. The BladeCam- XHR, Figure 1, can be used to measure the point spread function (PSF) of each mode, the relative efficiency of each mode and the spacing between diffraction modes. Figure 1 BladeCam-XHR Using the BladeCam-XHR for Diffraction Grating Evaluation The profiling mode in the DataRay software can be used to evaluate the performance of a diffraction grating. -
Applications of Laser Spectroscopy Constitute a Vast Field, Which Is Difficult to Spectroscopy Cover Comprehensively in a Review
LASERS & OPTICS 151 many cases non-destructively. A variety of beam manipulation schemes are avail able for the irradiation of samples either directly or after preparation. The unique properties of laser radiation in terms of coherence, intensity and directionality permit remote chemical sensing, where the analytical equipment and the sample are separated by large distances, even of several kilometres. Absorption, and in particular differential absorption, can be utilised in long-path measurements, whereas elastic and inelastic backscatter- ing as well as fluorescence can be used for range-resolved radar-like measure ments (LIDAR: light detection and rang ing). Laser light can also be efficiently transported in optical fibres to remotely located measurement sites. Various prop erties of the fibre itself influence the laser light propagating through the fibre, thus Applications of Laser forming a basis for fibre optic sensors. Applications of laser spectroscopy constitute a vast field, which is difficult to Spectroscopy cover comprehensively in a review. Rather than attempting such a review, examples from a variety of fields are cho Costas Fotakis sen for illustrating the power of applied University of Crete, Greece laser spectroscopy. Sune Svanberg Lund Institute of Technology, Sweden Applications in Analytical Chemistry Laser spectroscopy is making a major impact in many traditional fields of ana As the new millennium approaches the Above The Italian research vessel Urania, carrying a lytical spectroscopy. For instance, opto- know how in the field of laser-matter Swedish laser radar system, which has sailed under the galvanic spectroscopy on analytical smoky plumes of Sicilian volcanos in Italy measuring the interactions has matured to the stage of sulphur dioxide content flames increases the sensitivity of enabling several exciting real life applica absorption and emission flame spec tions. -

Hair Reduction by Laser
Ames Locations To Eldora, Iowa Falls, McFarland Clinic North Ames Story City, Urgent Care Webster City Treatment McFarland Clinic (3815 Stange Rd.) Bloomington Road McFarland Clinic Physical Therapy - Somerset West Ames e. (2707 Stange Rd., Suite 102) 24th Street Av f e. Duf Av You should not use any Accutane (a prescribed oral US 69 Ontario Street 13th Street Grand 13th Street acne medication) or gold medications (for arthritis) McFarland Clinic (1215 Duff) MGMC - North Addition for six months prior to a treatment. You should William R. Bliss Cancer Center 12th Street Stange Road . e. Mary Greeley Medical Center (MGMC) McFarland Eye Center not use retinoids (e.g. Retin A, Fifferin, Differin, Av (1111 Duff Ave.) (1128 Duff) e. 11th Street Ramp Av McFarland Family Avita, Tazorac), alpha-hydroxy acid moisturizers, Medicine East Hyland St Medical Arts Building (1018 Duff) To Boone, Carroll I-35 bleaching creams (hydroquinone) or chemical peels Iowa State (1015 Duff) Jefferson N. Dakota Marshall University for two weeks prior to a treatment. Do not pluck the Lincoln Way Lincoln Way Express Care Express Care hairs, wax or use depilatories or electrolysis for six e. (3800 Lincoln Way) (640 Lincoln Way) weeks prior to a treatment. Av McFarland Clinic West Ames Hy-Vee (3600 Lincoln Way) Hy-Vee e. Av ff You may be asked to shave the area prior to your S. Dakota To Nevada, Du first treatment appointment. You may also be Marshalltown prescribed a topical anesthetic (numbing) cream to Highway 30 help reduce any discomfort the laser may cause. Blvd University First Treatment: The laser will be used to treat the N areas by your dermatologist or one of the trained Oakwood Road Airport Road dermatology staff. -
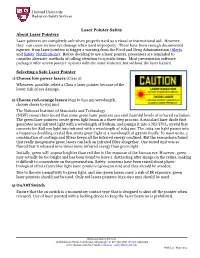
Laser Pointer Safety About Laser Pointers Laser Pointers Are Completely Safe When Properly Used As a Visual Or Instructional Aid
Harvard University Radiation Safety Services Laser Pointer Safety About Laser Pointers Laser pointers are completely safe when properly used as a visual or instructional aid. However, they can cause serious eye damage when used improperly. There have been enough documented injuries from laser pointers to trigger a warning from the Food and Drug Administration (Alerts and Safety Notifications). Before deciding to use a laser pointer, presenters are reminded to consider alternate methods of calling attention to specific items. Most presentation software packages offer screen pointer options with the same features, but without the laser hazard. Selecting a Safe Laser Pointer 1) Choose low power lasers (Class 2) Whenever possible, select a Class 2 laser pointer because of the lower risk of eye damage. 2) Choose red-orange lasers (633 to 650 nm wavelength, choose closer to 635 nm) The National Institute of Standards and Technology (NIST) researchers found that some green laser pointers can emit harmful levels of infrared radiation. The green laser pointers create green light beam in a three step process. A standard laser diode first generates near infrared light with a wavelength of 808nm, and pumps it into a ND:YVO4 crystal that converts the 808 nm light into infrared with a wavelength of 1064 nm. The 1064 nm light passes into a frequency doubling crystal that emits green light at a wavelength of 532nm finally. In most units, a combination of coatings and filters keeps all the infrared energy confined. But the researchers found that really inexpensive green lasers can lack an infrared filter altogether. One tested unit was so flawed that it released nine times more infrared energy than green light. -
UFS Lecture 13: Passive Modelocking
UFS Lecture 13: Passive Modelocking 6 Passive Mode Locking 6.2 Fast Saturable Absorber Mode Locking (cont.) (6.3 Soliton Mode Locking) 6.4 Dispersion Managed Soliton Formation 7 Mode-Locking using Artificial Fast Sat. Absorbers 7.1 Kerr-Lens Mode-Locking 7.1.1 Review of Paraxial Optics and Laser Resonator Design 7.1.2 Two-Mirror Resonators 7.1.3 Four-Mirror Resonators 7.1.4 The Kerr Lensing Effects (7.2 Additive Pulse Mode-Locking) 1 6.2.2 Fast SA mode locking with GDD and SPM Steady-state solution is chirped sech-shaped pulse with 4 free parameters: Pulse amplitude: A0 or Energy: W 2 = 2 A0 t Pulse width: t Chirp parameter : b Carrier-Envelope phase shift : y 2 Pulse width Chirp parameter Net gain after and Before pulse CE-phase shift Fig. 6.6: Modelocking 3 6.4 Dispersion Managed Soliton Formation in Fiber Lasers ~100 fold energy Fig. 6.12: Stretched pulse or dispersion managed soliton mode locking 4 Fig. 6.13: (a) Kerr-lens mode-locked Ti:sapphire laser. (b) Correspondence with dispersion-managed fiber transmission. 5 Today’s BroadBand, Prismless Ti:sapphire Lasers 1mm BaF2 Laser crystal: f = 10o OC 2mm Ti:Al2O3 DCM 2 PUMP DCM 2 DCM 1 DCM 1 DCM 2 DCM 1 BaF2 - wedges DCM 6 Fig. 6.14: Dispersion managed soliton including saturable absorption and gain filtering 7 Fig. 6.15: Steady state profile if only dispersion and GDD is involved: Dispersion Managed Soliton 8 Fig. 6.16: Pulse shortening due to dispersion managed soliton formation 9 7. -

Solid State Laser
SOLID STATE LASER Edited by Amin H. Al-Khursan Solid State Laser Edited by Amin H. Al-Khursan Published by InTech Janeza Trdine 9, 51000 Rijeka, Croatia Copyright © 2012 InTech All chapters are Open Access distributed under the Creative Commons Attribution 3.0 license, which allows users to download, copy and build upon published articles even for commercial purposes, as long as the author and publisher are properly credited, which ensures maximum dissemination and a wider impact of our publications. After this work has been published by InTech, authors have the right to republish it, in whole or part, in any publication of which they are the author, and to make other personal use of the work. Any republication, referencing or personal use of the work must explicitly identify the original source. As for readers, this license allows users to download, copy and build upon published chapters even for commercial purposes, as long as the author and publisher are properly credited, which ensures maximum dissemination and a wider impact of our publications. Notice Statements and opinions expressed in the chapters are these of the individual contributors and not necessarily those of the editors or publisher. No responsibility is accepted for the accuracy of information contained in the published chapters. The publisher assumes no responsibility for any damage or injury to persons or property arising out of the use of any materials, instructions, methods or ideas contained in the book. Publishing Process Manager Iva Simcic Technical Editor Teodora Smiljanic Cover Designer InTech Design Team First published February, 2012 Printed in Croatia A free online edition of this book is available at www.intechopen.com Additional hard copies can be obtained from [email protected] Solid State Laser, Edited by Amin H. -

Lab 10: Spatial Profile of a Laser Beam
Lab 10: Spatial Pro¯le of a Laser Beam 2 Background We will deal with a special class of Gaussian beams for which the transverse electric ¯eld can be written as, r2 1 Introduction ¡ 2 E(r) = Eoe w (1) Equation 1 is expressed in plane polar coordinates Refer to Appendix D for photos of the appara- where r is the radial distance from the center of the 2 2 2 tus beam (recall r = x +y ) and w is a parameter which is called the spot size of the Gaussian beam (it is also A laser beam can be characterized by measuring its referred to as the Gaussian beam radius). It is as- spatial intensity pro¯le at points perpendicular to sumed that the transverse direction is the x-y plane, its direction of propagation. The spatial intensity pro- perpendicular to the direction of propagation (z) of ¯le is the variation of intensity as a function of dis- the beam. tance from the center of the beam, in a plane per- pendicular to its direction of propagation. It is often Since we typically measure the intensity of a beam convenient to think of a light wave as being an in¯nite rather than the electric ¯eld, it is more useful to recast plane electromagnetic wave. Such a wave propagating equation 1. The intensity I of the beam is related to along (say) the z-axis will have its electric ¯eld uni- E by the following equation, formly distributed in the x-y plane. This implies that " cE2 I = o (2) the spatial intensity pro¯le of such a light source will 2 be uniform as well. -

Performance Evaluation of a Thz Pulsed Imaging System: Point Spread Function, Broadband Thz Beam Visualization and Image Reconstruction
applied sciences Article Performance Evaluation of a THz Pulsed Imaging System: Point Spread Function, Broadband THz Beam Visualization and Image Reconstruction Marta Di Fabrizio 1,* , Annalisa D’Arco 2,* , Sen Mou 2, Luigi Palumbo 3, Massimo Petrarca 2,3 and Stefano Lupi 1,4 1 Physics Department, University of Rome ‘La Sapienza’, P.le Aldo Moro 5, 00185 Rome, Italy; [email protected] 2 INFN-Section of Rome ‘La Sapienza’, P.le Aldo Moro 2, 00185 Rome, Italy; [email protected] (S.M.); [email protected] (M.P.) 3 SBAI-Department of Basic and Applied Sciences for Engineering, Physics, University of Rome ‘La Sapienza’, Via Scarpa 16, 00161 Rome, Italy; [email protected] 4 INFN-LNF, Via E. Fermi 40, 00044 Frascati, Italy * Correspondence: [email protected] (M.D.F.); [email protected] (A.D.) Abstract: Terahertz (THz) technology is a promising research field for various applications in basic science and technology. In particular, THz imaging is a new field in imaging science, where theories, mathematical models and techniques for describing and assessing THz images have not completely matured yet. In this work, we investigate the performances of a broadband pulsed THz imaging system (0.2–2.5 THz). We characterize our broadband THz beam, emitted from a photoconductive antenna (PCA), and estimate its point spread function (PSF) and the corresponding spatial resolution. We provide the first, to our knowledge, 3D beam profile of THz radiation emitted from a PCA, along its propagation axis, without the using of THz cameras or profilers, showing the beam spatial Citation: Di Fabrizio, M.; D’Arco, A.; intensity distribution. -

Gaussian Beams • Diffraction at Cavity Mirrors Creates Gaussian Spherical
Gaussian Beams • Diffraction at cavity mirrors creates Gaussian Spherical Waves • Recall E field for Gaussian U ⎛ ⎡ x2 + y2 ⎤⎞ 0 ⎜ ( ) ⎟ u( x,y,R,t ) = exp⎜i⎢ω t − Kr − ⎥⎟ R ⎝ ⎣ 2R ⎦⎠ • R becomes the radius of curvature of the wave front • These are really TEM00 mode emissions from laser • Creates a Gaussian shaped beam intensity ⎛ − 2r 2 ⎞ 2P ⎛ − 2r 2 ⎞ I( r ) I exp⎜ ⎟ exp⎜ ⎟ = 0 ⎜ 2 ⎟ = 2 ⎜ 2 ⎟ ⎝ w ⎠ π w ⎝ w ⎠ Where P = total power in the beam w = 1/e2 beam radius • w changes with distance z along the beam ie. w(z) Measurements of Spotsize • For Gaussian beam important factor is the “spotsize” • Beam spotsize is measured in 3 possible ways • 1/e radius of beam • 1/e2 radius = w(z) of the radiance (light intensity) most common laser specification value 13% of peak power point point where emag field down by 1/e • Full Width Half Maximum (FWHM) point where the laser power falls to half its initial value good for many interactions with materials • useful relationship FWHM = 1.665r1 e FWHM = 1.177w = 1.177r 1 e2 w = r 1 = 0.849 FWHM e2 Gaussian Beam Changes with Distance • The Gaussian beam radius of curvature with distance 2 ⎡ ⎛π w2 ⎞ ⎤ R( z ) = z⎢1 + ⎜ 0 ⎟ ⎥ ⎜ λz ⎟ ⎣⎢ ⎝ ⎠ ⎦⎥ • Gaussian spot size with distance 1 2 2 ⎡ ⎛ λ z ⎞ ⎤ w( z ) = w ⎢1 + ⎜ ⎟ ⎥ 0 ⎜π w2 ⎟ ⎣⎢ ⎝ 0 ⎠ ⎦⎥ • Note: for lens systems lens diameter must be 3w0.= 99% of power • Note: some books define w0 as the full width rather than half width • As z becomes large relative to the beam asymptotically approaches ⎛ λ z ⎞ λ z w(z) ≈ w ⎜ ⎟ = 0 ⎜ 2 ⎟ ⎝π w0 ⎠ π w0 • Asymptotically light -

Optics of Gaussian Beams 16
CHAPTER SIXTEEN Optics of Gaussian Beams 16 Optics of Gaussian Beams 16.1 Introduction In this chapter we shall look from a wave standpoint at how narrow beams of light travel through optical systems. We shall see that special solutions to the electromagnetic wave equation exist that take the form of narrow beams – called Gaussian beams. These beams of light have a characteristic radial intensity profile whose width varies along the beam. Because these Gaussian beams behave somewhat like spherical waves, we can match them to the curvature of the mirror of an optical resonator to find exactly what form of beam will result from a particular resonator geometry. 16.2 Beam-Like Solutions of the Wave Equation We expect intuitively that the transverse modes of a laser system will take the form of narrow beams of light which propagate between the mirrors of the laser resonator and maintain a field distribution which remains distributed around and near the axis of the system. We shall therefore need to find solutions of the wave equation which take the form of narrow beams and then see how we can make these solutions compatible with a given laser cavity. Now, the wave equation is, for any field or potential component U0 of Beam-Like Solutions of the Wave Equation 517 an electromagnetic wave ∂2U ∇2U − µ 0 =0 (16.1) 0 r 0 ∂t2 where r is the dielectric constant, which may be a function of position. The non-plane wave solutions that we are looking for are of the form i(ωt−k(r)·r) U0 = U(x, y, z)e (16.2) We allow the wave vector k(r) to be a function of r to include situations where the medium has a non-uniform refractive index. -

Arxiv:1510.07708V2
1 Abstract We study the fidelity of single qubit quantum gates performed with two-frequency laser fields that have a Gaussian or super Gaussian spatial mode. Numerical simulations are used to account for imperfections arising from atomic motion in an optical trap, spatially varying Stark shifts of the trapping and control beams, and transverse and axial misalignment of the control beams. Numerical results that account for the three dimensional distribution of control light show that a super Gaussian mode with intensity − n I ∼ e 2(r/w0) provides reduced sensitivity to atomic motion and beam misalignment. Choosing a super Gaussian with n = 6 the decay time of finite temperature Rabi oscillations can be increased by a factor of 60 compared to an n = 2 Gaussian beam, while reducing crosstalk to neighboring qubit sites. arXiv:1510.07708v2 [quant-ph] 31 Mar 2016 Noname manuscript No. (will be inserted by the editor) Comparison of Gaussian and super Gaussian laser beams for addressing atomic qubits Katharina Gillen-Christandl1, Glen D. Gillen1, M. J. Piotrowicz2,3, M. Saffman2 1 Physics Department, California Polytechnic State University, 1 Grand Avenue, San Luis Obispo, CA 93407, USA 2 Department of Physics, University of Wisconsin-Madison, 1150 University Av- enue, Madison, Wisconsin 53706, USA 3 Department of Physics, University of Michigan, Ann Arbor, MI 48109, USA April 4, 2016 1 Introduction Atomic qubits encoded in hyperfine ground states are one of several ap- proaches being developed for quantum computing experiments[1]. Single qubit rotations can be performed with microwave radiation or two-frequency laser light driving stimulated Raman transitions.