Random Sequential Adsorption of Platonic and Archimedean Solids
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

On the Archimedean Or Semiregular Polyhedra
ON THE ARCHIMEDEAN OR SEMIREGULAR POLYHEDRA Mark B. Villarino Depto. de Matem´atica, Universidad de Costa Rica, 2060 San Jos´e, Costa Rica May 11, 2005 Abstract We prove that there are thirteen Archimedean/semiregular polyhedra by using Euler’s polyhedral formula. Contents 1 Introduction 2 1.1 RegularPolyhedra .............................. 2 1.2 Archimedean/semiregular polyhedra . ..... 2 2 Proof techniques 3 2.1 Euclid’s proof for regular polyhedra . ..... 3 2.2 Euler’s polyhedral formula for regular polyhedra . ......... 4 2.3 ProofsofArchimedes’theorem. .. 4 3 Three lemmas 5 3.1 Lemma1.................................... 5 3.2 Lemma2.................................... 6 3.3 Lemma3.................................... 7 4 Topological Proof of Archimedes’ theorem 8 arXiv:math/0505488v1 [math.GT] 24 May 2005 4.1 Case1: fivefacesmeetatavertex: r=5. .. 8 4.1.1 At least one face is a triangle: p1 =3................ 8 4.1.2 All faces have at least four sides: p1 > 4 .............. 9 4.2 Case2: fourfacesmeetatavertex: r=4 . .. 10 4.2.1 At least one face is a triangle: p1 =3................ 10 4.2.2 All faces have at least four sides: p1 > 4 .............. 11 4.3 Case3: threefacesmeetatavertes: r=3 . ... 11 4.3.1 At least one face is a triangle: p1 =3................ 11 4.3.2 All faces have at least four sides and one exactly four sides: p1 =4 6 p2 6 p3. 12 4.3.3 All faces have at least five sides and one exactly five sides: p1 =5 6 p2 6 p3 13 1 5 Summary of our results 13 6 Final remarks 14 1 Introduction 1.1 Regular Polyhedra A polyhedron may be intuitively conceived as a “solid figure” bounded by plane faces and straight line edges so arranged that every edge joins exactly two (no more, no less) vertices and is a common side of two faces. -

Archimedean Solids
University of Nebraska - Lincoln DigitalCommons@University of Nebraska - Lincoln MAT Exam Expository Papers Math in the Middle Institute Partnership 7-2008 Archimedean Solids Anna Anderson University of Nebraska-Lincoln Follow this and additional works at: https://digitalcommons.unl.edu/mathmidexppap Part of the Science and Mathematics Education Commons Anderson, Anna, "Archimedean Solids" (2008). MAT Exam Expository Papers. 4. https://digitalcommons.unl.edu/mathmidexppap/4 This Article is brought to you for free and open access by the Math in the Middle Institute Partnership at DigitalCommons@University of Nebraska - Lincoln. It has been accepted for inclusion in MAT Exam Expository Papers by an authorized administrator of DigitalCommons@University of Nebraska - Lincoln. Archimedean Solids Anna Anderson In partial fulfillment of the requirements for the Master of Arts in Teaching with a Specialization in the Teaching of Middle Level Mathematics in the Department of Mathematics. Jim Lewis, Advisor July 2008 2 Archimedean Solids A polygon is a simple, closed, planar figure with sides formed by joining line segments, where each line segment intersects exactly two others. If all of the sides have the same length and all of the angles are congruent, the polygon is called regular. The sum of the angles of a regular polygon with n sides, where n is 3 or more, is 180° x (n – 2) degrees. If a regular polygon were connected with other regular polygons in three dimensional space, a polyhedron could be created. In geometry, a polyhedron is a three- dimensional solid which consists of a collection of polygons joined at their edges. The word polyhedron is derived from the Greek word poly (many) and the Indo-European term hedron (seat). -
Unit 6 Visualising Solid Shapes(Final)
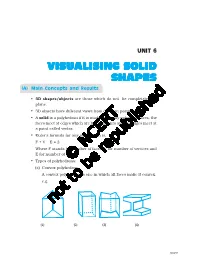
• 3D shapes/objects are those which do not lie completely in a plane. • 3D objects have different views from different positions. • A solid is a polyhedron if it is made up of only polygonal faces, the faces meet at edges which are line segments and the edges meet at a point called vertex. • Euler’s formula for any polyhedron is, F + V – E = 2 Where F stands for number of faces, V for number of vertices and E for number of edges. • Types of polyhedrons: (a) Convex polyhedron A convex polyhedron is one in which all faces make it convex. e.g. (1) (2) (3) (4) 12/04/18 (1) and (2) are convex polyhedrons whereas (3) and (4) are non convex polyhedron. (b) Regular polyhedra or platonic solids: A polyhedron is regular if its faces are congruent regular polygons and the same number of faces meet at each vertex. For example, a cube is a platonic solid because all six of its faces are congruent squares. There are five such solids– tetrahedron, cube, octahedron, dodecahedron and icosahedron. e.g. • A prism is a polyhedron whose bottom and top faces (known as bases) are congruent polygons and faces known as lateral faces are parallelograms (when the side faces are rectangles, the shape is known as right prism). • A pyramid is a polyhedron whose base is a polygon and lateral faces are triangles. • A map depicts the location of a particular object/place in relation to other objects/places. The front, top and side of a figure are shown. Use centimetre cubes to build the figure. -

How Platonic and Archimedean Solids Define Natural Equilibria of Forces for Tensegrity
How Platonic and Archimedean Solids Define Natural Equilibria of Forces for Tensegrity Martin Friedrich Eichenauer The Platonic and Archimedean solids are a well-known vehicle to describe Research Assistant certain phenomena of our surrounding world. It can be stated that they Technical University Dresden define natural equilibria of forces, which can be clarified particularly Faculty of Mathematics Institute of Geometry through the packing of spheres. [1][2] To solve the problem of the densest Germany packing, both geometrical and mechanical approach can be exploited. The mechanical approach works on the principle of minimal potential energy Daniel Lordick whereas the geometrical approach searches for the minimal distances of Professor centers of mass. The vertices of the solids are given by the centers of the Technical University Dresden spheres. Faculty of Geometry Institute of Geometry If we expand this idea by a contrary force, which pushes outwards, we Germany obtain the principle of tensegrity. We can show that we can build up regular and half-regular polyhedra by the interaction of physical forces. Every platonic and Archimedean solid can be converted into a tensegrity structure. Following this, a vast variety of shapes defined by multiple solids can also be obtained. Keywords: Platonic Solids, Archimedean Solids, Tensegrity, Force Density Method, Packing of Spheres, Modularization 1. PLATONIC AND ARCHIMEDEAN SOLIDS called “kissing number” problem. The kissing number problem is asking for the maximum possible number of Platonic and Archimedean solids have systematically congruent spheres, which touch another sphere of the been described in the antiquity. They denominate all same size without overlapping. In three dimensions the convex polyhedra with regular faces and uniform vertices kissing number is 12. -

Uniform Panoploid Tetracombs
Uniform Panoploid Tetracombs George Olshevsky TETRACOMB is a four-dimensional tessellation. In any tessellation, the honeycells, which are the n-dimensional polytopes that tessellate the space, Amust by definition adjoin precisely along their facets, that is, their ( n!1)- dimensional elements, so that each facet belongs to exactly two honeycells. In the case of tetracombs, the honeycells are four-dimensional polytopes, or polychora, and their facets are polyhedra. For a tessellation to be uniform, the honeycells must all be uniform polytopes, and the vertices must be transitive on the symmetry group of the tessellation. Loosely speaking, therefore, the vertices must be “surrounded all alike” by the honeycells that meet there. If a tessellation is such that every point of its space not on a boundary between honeycells lies in the interior of exactly one honeycell, then it is panoploid. If one or more points of the space not on a boundary between honeycells lie inside more than one honeycell, the tessellation is polyploid. Tessellations may also be constructed that have “holes,” that is, regions that lie inside none of the honeycells; such tessellations are called holeycombs. It is possible for a polyploid tessellation to also be a holeycomb, but not for a panoploid tessellation, which must fill the entire space exactly once. Polyploid tessellations are also called starcombs or star-tessellations. Holeycombs usually arise when (n!1)-dimensional tessellations are themselves permitted to be honeycells; these take up the otherwise free facets that bound the “holes,” so that all the facets continue to belong to two honeycells. In this essay, as per its title, we are concerned with just the uniform panoploid tetracombs. -

Five-Vertex Archimedean Surface Tessellation by Lanthanide-Directed Molecular Self-Assembly
Five-vertex Archimedean surface tessellation by lanthanide-directed molecular self-assembly David Écijaa,1, José I. Urgela, Anthoula C. Papageorgioua, Sushobhan Joshia, Willi Auwärtera, Ari P. Seitsonenb, Svetlana Klyatskayac, Mario Rubenc,d, Sybille Fischera, Saranyan Vijayaraghavana, Joachim Reicherta, and Johannes V. Bartha,1 aPhysik Department E20, Technische Universität München, D-85478 Garching, Germany; bPhysikalisch-Chemisches Institut, Universität Zürich, CH-8057 Zürich, Switzerland; cInstitute of Nanotechnology, Karlsruhe Institute of Technology, D-76344 Eggenstein-Leopoldshafen, Germany; and dInstitut de Physique et Chimie des Matériaux de Strasbourg (IPCMS), CNRS-Université de Strasbourg, F-67034 Strasbourg, France Edited by Kenneth N. Raymond, University of California, Berkeley, CA, and approved March 8, 2013 (received for review December 28, 2012) The tessellation of the Euclidean plane by regular polygons has by five interfering laser beams, conceived to specifically address been contemplated since ancient times and presents intriguing the surface tiling problem, yielded a distorted, 2D Archimedean- aspects embracing mathematics, art, and crystallography. Sig- like architecture (24). nificant efforts were devoted to engineer specific 2D interfacial In the last decade, the tools of supramolecular chemistry on tessellations at the molecular level, but periodic patterns with surfaces have provided new ways to engineer a diversity of sur- distinct five-vertex motifs remained elusive. Here, we report a face-confined molecular architectures, mainly exploiting molecular direct scanning tunneling microscopy investigation on the cerium- recognition of functional organic species or the metal-directed directed assembly of linear polyphenyl molecular linkers with assembly of molecular linkers (5). Self-assembly protocols have terminal carbonitrile groups on a smooth Ag(111) noble-metal sur- been developed to achieve regular surface tessellations, includ- face. -

Are Your Polyhedra the Same As My Polyhedra?
Are Your Polyhedra the Same as My Polyhedra? Branko Gr¨unbaum 1 Introduction “Polyhedron” means different things to different people. There is very little in common between the meaning of the word in topology and in geometry. But even if we confine attention to geometry of the 3-dimensional Euclidean space – as we shall do from now on – “polyhedron” can mean either a solid (as in “Platonic solids”, convex polyhedron, and other contexts), or a surface (such as the polyhedral models constructed from cardboard using “nets”, which were introduced by Albrecht D¨urer [17] in 1525, or, in a more mod- ern version, by Aleksandrov [1]), or the 1-dimensional complex consisting of points (“vertices”) and line-segments (“edges”) organized in a suitable way into polygons (“faces”) subject to certain restrictions (“skeletal polyhedra”, diagrams of which have been presented first by Luca Pacioli [44] in 1498 and attributed to Leonardo da Vinci). The last alternative is the least usual one – but it is close to what seems to be the most useful approach to the theory of general polyhedra. Indeed, it does not restrict faces to be planar, and it makes possible to retrieve the other characterizations in circumstances in which they reasonably apply: If the faces of a “surface” polyhedron are sim- ple polygons, in most cases the polyhedron is unambiguously determined by the boundary circuits of the faces. And if the polyhedron itself is without selfintersections, then the “solid” can be found from the faces. These reasons, as well as some others, seem to warrant the choice of our approach. -

An Enduring Error
Version June 5, 2008 Branko Grünbaum: An enduring error 1. Introduction. Mathematical truths are immutable, but mathematicians do make errors, especially when carrying out non-trivial enumerations. Some of the errors are "innocent" –– plain mis- takes that get corrected as soon as an independent enumeration is carried out. For example, Daublebsky [14] in 1895 found that there are precisely 228 types of configurations (123), that is, collections of 12 lines and 12 points, each incident with three of the others. In fact, as found by Gropp [19] in 1990, the correct number is 229. Another example is provided by the enumeration of the uniform tilings of the 3-dimensional space by Andreini [1] in 1905; he claimed that there are precisely 25 types. However, as shown [20] in 1994, the correct num- ber is 28. Andreini listed some tilings that should not have been included, and missed several others –– but again, these are simple errors easily corrected. Much more insidious are errors that arise by replacing enumeration of one kind of ob- ject by enumeration of some other objects –– only to disregard the logical and mathematical distinctions between the two enumerations. It is surprising how errors of this type escape detection for a long time, even though there is frequent mention of the results. One example is provided by the enumeration of 4-dimensional simple polytopes with 8 facets, by Brückner [7] in 1909. He replaces this enumeration by that of 3-dimensional "diagrams" that he inter- preted as Schlegel diagrams of convex 4-polytopes, and claimed that the enumeration of these objects is equivalent to that of the polytopes. -

New Perspectives on Polyhedral Molecules and Their Crystal Structures Santiago Alvarez, Jorge Echeverria
New Perspectives on Polyhedral Molecules and their Crystal Structures Santiago Alvarez, Jorge Echeverria To cite this version: Santiago Alvarez, Jorge Echeverria. New Perspectives on Polyhedral Molecules and their Crystal Structures. Journal of Physical Organic Chemistry, Wiley, 2010, 23 (11), pp.1080. 10.1002/poc.1735. hal-00589441 HAL Id: hal-00589441 https://hal.archives-ouvertes.fr/hal-00589441 Submitted on 29 Apr 2011 HAL is a multi-disciplinary open access L’archive ouverte pluridisciplinaire HAL, est archive for the deposit and dissemination of sci- destinée au dépôt et à la diffusion de documents entific research documents, whether they are pub- scientifiques de niveau recherche, publiés ou non, lished or not. The documents may come from émanant des établissements d’enseignement et de teaching and research institutions in France or recherche français ou étrangers, des laboratoires abroad, or from public or private research centers. publics ou privés. Journal of Physical Organic Chemistry New Perspectives on Polyhedral Molecules and their Crystal Structures For Peer Review Journal: Journal of Physical Organic Chemistry Manuscript ID: POC-09-0305.R1 Wiley - Manuscript type: Research Article Date Submitted by the 06-Apr-2010 Author: Complete List of Authors: Alvarez, Santiago; Universitat de Barcelona, Departament de Quimica Inorganica Echeverria, Jorge; Universitat de Barcelona, Departament de Quimica Inorganica continuous shape measures, stereochemistry, shape maps, Keywords: polyhedranes http://mc.manuscriptcentral.com/poc Page 1 of 20 Journal of Physical Organic Chemistry 1 2 3 4 5 6 7 8 9 10 New Perspectives on Polyhedral Molecules and their Crystal Structures 11 12 Santiago Alvarez, Jorge Echeverría 13 14 15 Departament de Química Inorgànica and Institut de Química Teòrica i Computacional, 16 Universitat de Barcelona, Martí i Franquès 1-11, 08028 Barcelona (Spain). -
![Math.MG] 25 Sep 2012 Oisb Ue N Ops,O Ae Folding](https://docslib.b-cdn.net/cover/3106/math-mg-25-sep-2012-oisb-ue-n-ops-o-ae-folding-1203106.webp)
Math.MG] 25 Sep 2012 Oisb Ue N Ops,O Ae Folding
Constructing the Cubus simus and the Dodecaedron simum via paper folding Urs Hartl and Klaudia Kwickert August 27, 2012 Abstract The archimedean solids Cubus simus (snub cube) and Dodecaedron simum (snub dodecahe- dron) cannot be constructed by ruler and compass. We explain that for general reasons their vertices can be constructed via paper folding on the faces of a cube, respectively dodecahedron, and we present explicit folding constructions. The construction of the Cubus simus is particularly elegant. We also review and prove the construction rules of the other Archimedean solids. Keywords: Archimedean solids Snub cube Snub dodecahedron Construction Paper folding · · · · Mathematics Subject Classification (2000): 51M15, (51M20) Contents 1 Construction of platonic and archimedean solids 1 2 The Cubus simus constructed out of a cube 4 3 The Dodecaedron simum constructed out of a dodecahedron 7 A Verifying the construction rules from figures 2, 3, and 4. 11 References 13 1 Construction of platonic and archimedean solids arXiv:1202.0172v2 [math.MG] 25 Sep 2012 The archimedean solids were first described by Archimedes in a now-lost work and were later redis- covered a few times. They are convex polyhedra with regular polygons as faces and many symmetries, such that their symmetry group acts transitively on their vertices [AW86, Cro97]. They can be built by placing their vertices on the faces of a suitable platonic solid, a tetrahedron, a cube, an octahedron, a dodecahedron, or an icosahedron. In this article we discuss the constructibility of the archimedean solids by ruler and compass, or paper folding. All the platonic solids can be constructed by ruler and compass. -

Convex Polytopes and Tilings with Few Flag Orbits
Convex Polytopes and Tilings with Few Flag Orbits by Nicholas Matteo B.A. in Mathematics, Miami University M.A. in Mathematics, Miami University A dissertation submitted to The Faculty of the College of Science of Northeastern University in partial fulfillment of the requirements for the degree of Doctor of Philosophy April 14, 2015 Dissertation directed by Egon Schulte Professor of Mathematics Abstract of Dissertation The amount of symmetry possessed by a convex polytope, or a tiling by convex polytopes, is reflected by the number of orbits of its flags under the action of the Euclidean isometries preserving the polytope. The convex polytopes with only one flag orbit have been classified since the work of Schläfli in the 19th century. In this dissertation, convex polytopes with up to three flag orbits are classified. Two-orbit convex polytopes exist only in two or three dimensions, and the only ones whose combinatorial automorphism group is also two-orbit are the cuboctahedron, the icosidodecahedron, the rhombic dodecahedron, and the rhombic triacontahedron. Two-orbit face-to-face tilings by convex polytopes exist on E1, E2, and E3; the only ones which are also combinatorially two-orbit are the trihexagonal plane tiling, the rhombille plane tiling, the tetrahedral-octahedral honeycomb, and the rhombic dodecahedral honeycomb. Moreover, any combinatorially two-orbit convex polytope or tiling is isomorphic to one on the above list. Three-orbit convex polytopes exist in two through eight dimensions. There are infinitely many in three dimensions, including prisms over regular polygons, truncated Platonic solids, and their dual bipyramids and Kleetopes. There are infinitely many in four dimensions, comprising the rectified regular 4-polytopes, the p; p-duoprisms, the bitruncated 4-simplex, the bitruncated 24-cell, and their duals. -

About Weaving and Helical Holes
Bridges 2010: Mathematics, Music, Art, Architecture, Culture About Weaving and Helical Holes Rinus Roelofs Sculptor Lansinkweg 28 7553AL Hengelo The Netherlands E-mail: [email protected] www.rinusroelofs.nl Abstract Weaving is an invention of man, and maybe one of the most important inventions in the field of construction. There are many weave patterns but most weave patterns are based on just two different grids, the plain weave and the three way weave. The development of weaving is mainly connected to the possibilities of manufacturing. In this paper I want to investigate this ‘passing one thread over another’-concept from a mathematical-artistic point of view. 1. Introduction 1.1. Over and Under. In Leonardo’s painting on the ceiling of the Sala delle Asse in the Sforza Castle in Milan (Figure 1) we can see different weaving patterns: the knotted ropes and the interwoven branches. Both can only be realized with the aid of man. Nature doesn’t weave by itself, at least not in the way Leonardo shows us in his painting. When we look for a definition of weaving we can find the following: weaving is the textile art in which two distinct sets of yarns or threads, called the warp and the filling or weft, are interlaced with each other to form a fabric or cloth. To define the concept of weaving in a more general way we could say that a weaving is a line pattern in which for each pair of adjacent crossing points on the line(s) the position of that line changes from ‘over’ to ‘under’ or from ‘under’ to ‘over’ (Figure 2a,b).