Rolling Stock Technology Assessment December 2010 APPENDIX 4
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Improved Spiral Geometry for High Speed Rail
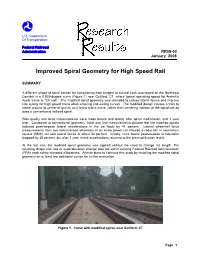
U.S. Department Of Transportation Federal Railroad Administration RR08-02 January 2008 Improved Spiral Geometry for High Speed Rail SUMMARY A different shape of spiral section for transitioning from tangent to curved track was tested on the Northeast Corridor in a 0.925-degree curve (Figure 1) near Guilford, CT, where typical operating speed for Amtrak's Acela trains is 125 mph. The modified spiral geometry was intended to reduce lateral forces and improve ride quality for high speed trains when entering and exiting curves. The modified design causes a train to rotate around its center of gravity as it leans into a curve, rather than centering rotation at the top-of-rail as does a conventional railroad spiral. Ride quality and force measurements were made before and shortly after spiral modification, and 1 year later. Compared to conventional geometry, initial and final measurements showed that the modified spirals reduced peak-to-peak lateral accelerations in the car body by 41 percent. Lateral wheel-rail force measurements from two instrumented wheelsets of an Acela power car showed a reduction in root-mean- square (RMS) net axle lateral forces of about 33 percent. Initially, truck lateral peak-to-peak acceleration dropped by 38 percent, but after 1 year, these accelerations returned to the pre-modification levels. At the test site, the modified spiral geometry was applied without the need to change rail length. The resulting shape and rate of superelevation change also fall within existing Federal Railroad Administration (FRA) track safety standard allowances. Amtrak plans to continue this study by installing the modified spiral geometry on at least two additional curves for further evaluation. -
The California High Speed Rail Proposal: a Due Diligence Report
September 2008 THE CALIFORNIA HIGH SPEED RAIL PROPO S AL : A DUE DILIGENCE REPOR T By Wendell Cox and Joseph Vranich Project Director: Adrian T. Moore, Ph.D. POLICY STUDY 370 Reason Citizens Against Howard Jarvis Taxpayers Foundation Government Waste Foundation reason.org cagw.org hjta.org/hjtf Reason Foundation’s mission is to advance Citizens Against Government Waste Howard Jarvis Taxpayers Foundation a free society by developing, applying and (CAGW) is a private, nonprofit, nonparti- (HJTF) is devoted to promoting economic promoting libertarian principles, including education, the study of tax policy and san organization dedicated to educating the individual liberty, free markets and the rule defending the interests of taxpayers in the American public about waste, mismanage- of law. We use journalism and public policy courts. research to influence the frameworks and ment, and inefficiency in the federal govern- The Foundation funds and directs stud- actions of policymakers, journalists and ment. ies on tax and economic issues and works opinion leaders. CAGW was founded in 1984 by J. Peter to provide constructive alternatives to the Reason Foundation’s nonpartisan public Grace and nationally-syndicated columnist tax-and-spend proposals from our state policy research promotes choice, competi- Jack Anderson to build support for imple- legislators. tion and a dynamic market economy as the HJTF also advances the interests of mentation of the Grace Commission recom- foundation for human dignity and progress. taxpayers in the courtroom. In appro- mendations and other waste-cutting propos- Reason produces rigorous, peer-reviewed priate cases, HJTF provides legal repre- research and directly engages the policy als. -

Investor Presentation 2019
Eversholt Rail Investor Presentation 2nd December 2019 Contents • Strategic context • Refranchising, opportunities and challenges • New and existing fleet management • Financial overview • Conclusions • Q&A 1 Executive summary • 2015-2018 characterised by investment to grow balance sheet • General election result and Williams Review should set the industry’s direction of travel over the medium term • Business focused on long-term value while addressing strategic challenges and opportunities • Contracted new build programmes coming to a very successful conclusion: C802 fleet fully delivered, C397 in advanced state of delivery and C195/C331 fleets progressing well • Management effort shifting to maximising opportunities for fleets with leases expiring in the near future and exploring attractiveness of alternative growth opportunities 2 Strategic context Strategy Great Trains, Great People, Great Future To be recognised as the expert provider of transport asset financing and Vision asset management for the long term Two strands to our strategy: 1 Optimise our current portfolio through maximising asset utilisation and investing to enhance residual value (RV) 2 Developing opportunities for further growth in transport sector Maintain investment discipline: we will continue to be selective in choosing growth opportunities ensuring that they are the right assets for our portfolio Great Trains Great Great People Great Great FutureGreat C802 all units in service Company offsite C397 in service 2019 4 2019 – pressures across the rail industry Reshaping -

Gloucester Railway Carriage & Wagon Co. 1St
Gloucester Railway Carriage & Wagon Co. 1st Generation DMU’s for British Railways A Review Rodger P. Bradley Gloucester RC&W Co.’s Diesel Multiple Units Rodger P Bradley As we know the history of the design and operation of diesel – or is it oil-engine powered? – multiple unit trains can be traced back well beyond nationalisation in 1948, although their use was not widespread in Britain until the mid 1950s. Today, we can see their most recent developments in the fixed formation sets operated over long distance routes on today’s networks, such as those of the Virgin Voyager design. It can be argued that the real ancestry can be seen in such as the experimental Michelin railcar and the Beardmore 3-car unit for the LMS in the 1930s, and the various streamlined GWR railcars of the same period. Whilst the idea of a self-propelled passenger vehicle, in the shape of numerous steam rail motors, was adopted by a number of the pre- grouping companies from around the turn of the 19th/20th century. (The earliest steam motor coach can be traced to 1847 – at the height of the so-called to modernise the rail network and its stock. ‘Railway Mania’.). However, perhaps in some ways surprisingly, the opportunity was not taken to introduce any new First of the “modern” multiple unit designs were techniques in design or construction methods, and built at Derby Works and introduced in 1954, as the majority of the early types were built on a the ‘lightweight’ series, and until 1956, only BR and traditional 57ft 0ins underframe. -
High-Strength, Lightweight Car Bodies for High-Speed Rail Vehicles
High-Speed Rail IDEA Program High-Strength, Lightweight Car Bodies for High-Speed Rail Vehicles Final Report for High-Speed Rail IDEA Project 32 Prepared by: Timothy Langan and W. Mark Buchta Surface Treatment Technologies Baltimore, MD October 2003 INNOVATIONS DESERVING EXPLORATORY ANALYSIS (IDEA) PROGRAMS MANAGED BY THE TRANSPORTATION RESEARCH BOARD This investigation was performed as part of the High-Speed Rail IDEA program supports innovative methods and technology in support of the Federal Railroad Administration’s (FRA) next-generation high-speed rail technology development program. The High-Speed Rail IDEA program is one of four IDEA programs managed by TRB. The other IDEA programs are listed below. • NCHRP Highway IDEA focuses on advances in the design, construction, safety, and maintenance of highway systems, is part of the National Cooperative Highway Research Program. • Transit IDEA focuses on development and testing of innovative concepts and methods for improving transit practice. The Transit IDEA Program is part of the Transit Cooperative Research Program, a cooperative effort of the Federal Transit Administration (FTA), the Transportation Research Board (TRB) and the Transit Development Corporation, a nonprofit educational and research organization of the American Public Transportation Association. The program is funded by the FTA and is managed by TRB. • Safety IDEA focuses on innovative approaches to improving motor carrier, railroad, and highway safety. The program is supported by the Federal Motor Carrier Safety Administration -

United States District Court Southern District of Ohio Western Division
Case: 1:05-cv-00437-MHW Doc #: 155 Filed: 03/15/13 Page: 1 of 10 PAGEID #: <pageID> UNITED STATES DISTRICT COURT SOUTHERN DISTRICT OF OHIO WESTERN DIVISION American Premier Underwriters, Inc., Plaintiff, Case No. 1:05cv437 v. Judge Michael R. Barrett General Electric Company, Defendant. OPINION & ORDER This matter is before the Court upon Defendant General Electric Company’s (“GE”) Motion for Summary Judgment on the Merits. (Doc. 92). Plaintiff American Premier Underwriters, Inc.’s (“APU”) filed a Memorandum in Opposition (Doc. 123), and GE filed a Reply (Doc. 142). GE has also filed a Notice of Supplemental Authority (Doc. 148), to which APU filed a Response (Doc. 149) and GE filed a Reply (Doc. 150). I. BACKGROUND Plaintiff APU is the successor to the Penn Central Transportation Company (“Penn Central”). This action arises from contamination at four rail yards operated by Penn Central prior to April 1, 1976: (1) the Paoli Yard, located in Paoli, Pennsylvania; (2) the South Amboy Yard, located in South Amboy, New Jersey; (3) Sunnyside Yard, located in Long Island, New York; and (4) Wilmington Shops and related facilities, located in Wilmington, Delaware. During the period when Penn Central operated these rail yards, it owned and used passenger rail cars with transformers manufactured by Defendant GE. APU claims the GE transformers contaminated the rail yards by leaking polychlorinated biphenyls (“PCBs”). The PCBs were contained in “Pyranol,” which was Case: 1:05-cv-00437-MHW Doc #: 155 Filed: 03/15/13 Page: 2 of 10 PAGEID #: <pageID> the trade name of the fluid used by GE in the transformers as a cooling and insulating fluid. -

New Principle Schemes of Freight Cars Bogies
April 2018, Vol. 18, No. 2 MANUFACTURING TECHNOLOGY ISSN 1213–2489 New Principle Schemes of Freight Cars Bogies Mykola Gorbunov1, Juraj Gerlici2, Sergey Kara1, Olena Nozhenko2, Ganna Chernyak1, Kateryna Kravchenko2, Tomas Lack2 1Institute transport and logistics, Volodymyr Dahl East Ukrainian National University, 03406 Tscentralny av., 59a, Se- werodonetsk, Ukraine. E-mail: [email protected], [email protected], [email protected] 2Faculty Mechanical Engineering, University of Zilina, 01026 Univerzitna 8215/1, Zilina, Slovakia. E-mail: juraj.ger- [email protected], [email protected], [email protected], [email protected] In the article the issue of perspective running parts for freight cars of new generation is considered and additions to the outdated existing classification of bogie are developed, namely introduction of such types of suspension is suggested.The results of theoretical studies are presented by means of modeling the movement of the car in the software "Universal Mechanism" to determine the influence of the first stage of spring suspension in Barber type bogie (type 18-100 and analogues) on energy efficiency (resistance to movement) and the estimated value of the decrease in resistance to movement.A concept for a fundamentally new design of a freight car bogie for high-speed traffic has been prepared, based on fundamentally new technical solutions with elastic-dissipative bearing ele- ments, as well as a concept for the modernization of the Barber-type bogie (type 18-100 and -

General Motor Diesel Locomotive
(Govt. of India) (Ministry of Railways) INTRODUCTION HAND BOOK ON GENERAL MOTOR DIESEL LOCOMOTIVE (For official use only) IRCAMTECH/2006/M/D/GM loco/1.0 FEBRUARY-2006 Centre for Advanced Maintenance TECHnology Excellence in Maintenance MAHARAJPUR, GWALIOR – 474020 INTRODUCTION HAND BOOK ON GENERAL MOTOR DIESEL LOCOMOTIVE i PREFACE The GM Locomotives have been included in the Diesel Locomotive fleet of Indian railway. Production of GM locomotive has already started in DLW, Varanasi. The 4000 HP, computer controlled GM locomotive has a large number of special and improved features vis-a-vis the Alco design diesel locomotive presently running in Indian railway. All those in the field of diesel locomotive need to get acquainted with the GM locomotive. This book “Introduction hand book on GM locomotive” prepared by the CAMTECH has been prepared with the purpose of disseminating the introductory information to all those in diesel loco maintenance field. The suggestions are invited from the readers to improve and make the book more useful. Any such suggestion shell be included in next publication. Date: - 28.02.2006 KUNDAN KUMAR Director (Mech) ii CONTENTS S No. Description Page No. 1. Preface i 2. Contents ii 3. Book details iii 4. Correction slips iv 5. Introduction of the GM Locomotive 1 to 2 6. General information data 3 to6 7. Various parts and its location 7 to 21 8. Fuel Oil System 22 to 25 9. Cooling Water System 26 to 30 10. Lube Oil System 31 to 37 11. Air Intake System 38 to 41 12. Compressed air system 42 to 43 13. -

The Piedmont Service: Hydrogen Fuel Cell Locomotive Feasibility
The Piedmont Service: Hydrogen Fuel Cell Locomotive Feasibility Andreas Hoffrichter, PhD Nick Little Shanelle Foster, PhD Raphael Isaac, PhD Orwell Madovi Darren Tascillo Center for Railway Research and Education Michigan State University Henry Center for Executive Development 3535 Forest Road, Lansing, MI 48910 NCDOT Project 2019-43 FHWA/NC/2019-43 October 2020 -i- FEASIBILITY REPORT The Piedmont Service: Hydrogen Fuel Cell Locomotive Feasibility October 2020 Prepared by Center for Railway Research and Education Eli Broad College of Business Michigan State University 3535 Forest Road Lansing, MI 48910 USA Prepared for North Carolina Department of Transportation – Rail Division 860 Capital Boulevard Raleigh, NC 27603 -ii- Technical Report Documentation Page 1. Report No. 2. Government Accession No. 3. Recipient’s Catalog No. FHWA/NC/2019-43 4. Title and Subtitle 5. Report Date The Piedmont Service: Hydrogen Fuel Cell Locomotive Feasibility October 2020 6. Performing Organization Code 7. Author(s) 8. Performing Organization Report No. Andreas Hoffrichter, PhD, https://orcid.org/0000-0002-2384-4463 Nick Little Shanelle N. Foster, PhD, https://orcid.org/0000-0001-9630-5500 Raphael Isaac, PhD Orwell Madovi Darren M. Tascillo 9. Performing Organization Name and Address 10. Work Unit No. (TRAIS) Center for Railway Research and Education 11. Contract or Grant No. Michigan State University Henry Center for Executive Development 3535 Forest Road Lansing, MI 48910 12. Sponsoring Agency Name and Address 13. Type of Report and Period Covered Final Report Research and Development Unit 104 Fayetteville Street December 2018 – October 2020 Raleigh, North Carolina 27601 14. Sponsoring Agency Code RP2019-43 Supplementary Notes: 16. -

3 Power Supply
3 Power supply Table of contents Article 44 Installation, etc. of Contact Lines, etc. .........................................................................2 Article 45 Approach or Crossing of Overhead Contact Lines, etc................................................ 10 Article 46 Insulation Division of Contact Lines............................................................................ 12 Article 47 Prevention of Problems under Overbridges, etc........................................................... 13 Article 48 Installation of Return Current Rails ........................................................................... 13 Article 49 Lightning protection..................................................................................................... 13 Article 51 Facilities at substations................................................................................................. 14 Article 52 Installation of electrical equipment and switchboards ................................................. 15 Article 53 Protection of electrical equipment................................................................................ 16 Article 54 Insulation of electric lines ............................................................................................ 16 Article 55 Grounding of Electrical Equipment ............................................................................. 18 Article 99 Inspection and monitoring of the contact lines on the main line.................................. 19 Article 101 Records........................................................................................................................ -

Section 4 ELECTRIC ROLLING STOCK EQUIPMENT POWER
Section 4 ELECTRIC ROLLING STOCK EQUIPMENT POWER 4.1 EQUIPMENT DESIGN AND CONSTRUCTION REQUIREMENTS The rolling stock equipment to be selected must be designed and built in full accordance with the rules and regulations issued by the Federal Railroad Administration (FRA) and the Recommendations issued by the American Public Transportation Association (APTA). On May 12, 1999, FRA issued comprehensive rules addressing rail vehicle design and construction in accordance with operating speeds. Tier I of the rules apply to "...railroad passengerequipment operating at speedsnot exceeding 125 mph..." "Unless otherwise specified, these requirements only apply to passenger equipment ordered on or after September 8, 2000 or placed in service for the first time on or after September 9, 2002. The rule also states that "The structural standards of this subpart. do not apply to passengerequipment if used exclusively on a rail line: (i) With no public highway-rail grade crossings; (ii) On which no freight operations occur at any time; (iii) On which only passengerequipment of compatible design is utilized; (iv) On which trains operate at speedsnot exceeding 79 mph. The rule provides for alternative compliance by demonstrating "...at least an equivalent of safety in such environment with respect to the protection of its occupants from serious injury in the case of a derailment or collision." Given the fact that JPB's equipment: a) operates, or may operate in the future, on the same lines as other freight and passengertrains; and b) that it will likely operate at speeds higher than 79 mph in the future, it is assumed that the electrically powered rolling stock will be required to meet the rules and regulations as written, with no waivers or alternative solutions. -

Pioneering the Application of High Speed Rail Express Trainsets in the United States
Parsons Brinckerhoff 2010 William Barclay Parsons Fellowship Monograph 26 Pioneering the Application of High Speed Rail Express Trainsets in the United States Fellow: Francis P. Banko Professional Associate Principal Project Manager Lead Investigator: Jackson H. Xue Rail Vehicle Engineer December 2012 136763_Cover.indd 1 3/22/13 7:38 AM 136763_Cover.indd 1 3/22/13 7:38 AM Parsons Brinckerhoff 2010 William Barclay Parsons Fellowship Monograph 26 Pioneering the Application of High Speed Rail Express Trainsets in the United States Fellow: Francis P. Banko Professional Associate Principal Project Manager Lead Investigator: Jackson H. Xue Rail Vehicle Engineer December 2012 First Printing 2013 Copyright © 2013, Parsons Brinckerhoff Group Inc. All rights reserved. No part of this work may be reproduced or used in any form or by any means—graphic, electronic, mechanical (including photocopying), recording, taping, or information or retrieval systems—without permission of the pub- lisher. Published by: Parsons Brinckerhoff Group Inc. One Penn Plaza New York, New York 10119 Graphics Database: V212 CONTENTS FOREWORD XV PREFACE XVII PART 1: INTRODUCTION 1 CHAPTER 1 INTRODUCTION TO THE RESEARCH 3 1.1 Unprecedented Support for High Speed Rail in the U.S. ....................3 1.2 Pioneering the Application of High Speed Rail Express Trainsets in the U.S. .....4 1.3 Research Objectives . 6 1.4 William Barclay Parsons Fellowship Participants ...........................6 1.5 Host Manufacturers and Operators......................................7 1.6 A Snapshot in Time .................................................10 CHAPTER 2 HOST MANUFACTURERS AND OPERATORS, THEIR PRODUCTS AND SERVICES 11 2.1 Overview . 11 2.2 Introduction to Host HSR Manufacturers . 11 2.3 Introduction to Host HSR Operators and Regulatory Agencies .