DEC 3000 Model 400/400S AXP Technical Summary
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Technical Specifications & Standard Equipment List
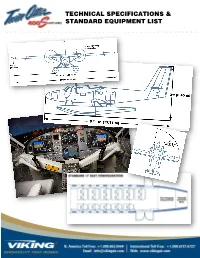
TECHNICAL SPECIFICATIONS & STANDARD EQUIPMENT LIST TECHNICAL SPECIFICATIONS & STANDARD EQUIPMENT LIST Aircraft Overview The Viking 400S Twin Otter (“400S”) is an all-metal, high wing monoplane, powered by two wing-mounted turboprop engines, The aircraft is delivered with two Pratt and Whitney PT6A-27 driving three-bladed, reversible pitch, fully feathering propellers. engines that incorporate platinum coated CT blades. The aircraft carries a pilot, co-pilot, and up to 17 passengers in standard configuration with a 19 or 15 passenger option. The The 400S will be supplied with new generation composite floats aircraft is a floatplane with no fixed landing gear. that reduce the overall aircraft weight (when compared to Series 400 Twin Otters configured for complex utility or special mission The 400S is an adaptation of the Viking DHC-6 Series 400 Twin operations). The weight savings allows the standard 400S to Otter (“Series 400”). It is specifically designed as an economical carry a 17 passenger load 150 nautical miles with typical seaplane for commercial operations on short to medium reserves, at an average passenger and baggage weight of 191 segments. lbs. (86.5 kg.). The Series 400 is an updated version of the Series 300 Twin Otter. The changes made in developing the Series 400 were 1. General Description selected to take advantage of newer technologies that permit more reliable and economical operations. Aircraft dimensions, Aircraft Dimensions construction techniques, and primary structure have not Overall Height 21 ft. 0 in (6.40 m) changed. Overall Length 51 ft. 9 in (15.77 m) Wing Span 65 ft. 0 in (19.81 m) The aircraft is manufactured at Viking Air Limited facilities in Horizontal Tail Span 20 ft. -

Boom Lift Models 400S 460SJ
Operation and Safety Manual Original Instructions - Keep this manual with the machine at all times. Boom Lift Models 400S 460SJ 3121216 ANSI ® May 25, 2012 FOREWORD FOREWORD This manual is a very important tool! Keep it with the machine at all times. The purpose of this manual is to provide owners, users, operators, lessors, and lessees with the precautions and operating procedures essential for the safe and proper machine operation for its intended purpose. Due to continuous product improvements, JLG Industries, Inc. reserves the right to make specification changes without prior notification. Contact JLG Industries, Inc. for updated information. 3121216 – JLG Lift – a FOREWORD SAFETY ALERT SYMBOLS AND SAFETY SIGNAL WORDS This is the Safety Alert Symbol. It is used to alert you to the potential personal injury hazards. Obey all safety messages that follow this symbol to avoid possible injury or death INDICATES AN IMMINENTLY HAZARDOUS SITUATION. IF NOT INDICATES A POTENTIALLY HAZARDOUS SITUATION. IF NOT AVOIDED, WILL RESULT IN SERIOUS INJURY OR DEATH. THIS DECAL AVOIDED, MAY RESULT IN MINOR OR MODERATE INJURY. IT MAY WILL HAVE A RED BACKGROUND. ALSO ALERT AGAINST UNSAFE PRACTICES. THIS DECAL WILL HAVE A YELLOW BACKGROUND. INDICATES A POTENTIALLY HAZARDOUS SITUATION. IF NOT AVOIDED, COULD RESULT IN SERIOUS INJURY OR DEATH. THIS INDICATES INFORMATION OR A COMPANY POLICY THAT RELATES DECAL WILL HAVE AN ORANGE BACKGROUND. DIRECTLY OR INDIRECTLY TO THE SAFETY OF PERSONNEL OR PRO- TECTION OF PROPERTY. b – JLG Lift – 3121216 FOREWORD For: THIS PRODUCT MUST COMPLY WITH ALL SAFETY RELATED BULLE- • Accident Reporting • Standards and Regulations TINS. CONTACT JLG INDUSTRIES, INC. -

Download This PDF File
Athens between East and West: Athenian Elite Self-Presentation and the Durability of Traditional Cult in Late Antiquity Edward Watts T IS GENERALLY ACCEPTED that the urban centers of the Greek-speaking east more quickly dismantled traditional religious infrastructure and disrupted traditional religious I 1 customs than did cities in the west. The city of Athens, how- ever, has always fit awkwardly in this narrative. Alexandria, long Athens’ rival for cultural supremacy in the Greek world, saw its urban infrastructure violently and effectively Christian- ized in the early 390s by the campaigns and construction projects of the bishop Theophilus.2 Alexandria’s civic and political life arguably followed suit after the violence that accompanied the consolidation of episcopal power by Theo- philus’ successor Cyril and the murder of the philosopher Hypatia in the early 410s.3 Antioch and its hinterland saw its pagan institutions disrupted gradually, first through isolated incidents like the conversion (and ultimate destruction) of the 1 See, among others, C. P. Jones, Between Pagan and Christian (Cambridge [Mass.] 2014) 107–143. 2 J. Hahn, “The Conversion of Cult Statues: The Destruction of the Serapeum 392 A.D. and the Transformation of Alexandria into the ‘Christ- Loving’ City,” in J. Hahn et al. (eds.), From Temple to Church: Destruction and Renewal of Local Cultic Topography in Late Antiquity (Leiden 2008) 335–363. Cf. E. Watts, Riot in Alexandria (Berkeley 2010) 191–205. 3 On Hypatia see C. Haas, Alexandria in Late Antiquity (Baltimore 1997) 295–316; M. Dzielska, Hypatia of Alexandria (Cambridge [Mass.] 1995) 88– 93; E. Watts, Hypatia: The Life and Legend of an Ancient Philosopher (Oxford 2017). -

Chapter 2.2 Fall of the Western Roman Empire 7.1.2
Chapter 2.2 Fall of the Western Roman Empire 7.1.2 • Problems from both inside and outside caused the Roman Empire to split and the western half to collapse. A. Many problems threatened the Roman Empire, leading one emperor to divide it in half. • At its height the Roman Empire included all the land around the Mediterranean Sea. • The empire became too large to defend or govern efficiently. • Emperor Diocletian divided the empire to make it more manageable. B. Problems in the Empire • Emperors gave up territory because they feared the empire had become too large. Yet new threats to the empire were appearing. • Because so many people were needed for the army, there was no one left to farm the land. • Disease and high taxes threatened Rome’s survival. C. Division of the Empire • Emperor Diocletian divided the empire because it was too big for one person to rule. • Emperor Constantine reunited the two halves shortly after he took power. He moved the capital east, into what is now Turkey. • The new capital was called Constantinople. Power no longer resided in Rome. D. Barbarians invaded Rome in the 300s and 400s. • Not long after Rome’s capital moved, German barbarians raided the Roman Empire. • In the late 300s, a new group, called the Huns, invaded Europe. They were from Central Asia. • The Goths fled from the Huns into Rome. They moved into western Roman territory. • Additional attacks by more invaders made the empire weak. E. The Sacking of Rome • The Huns pushed a group called the Goths into Rome because they had nowhere else to go. -

Helios Nanolab 400 / 400S / 400ML / 600 User Operation Manual
Helios NanoLab 400 / 400 S / 400 ML / 600 User Operation Manual 1st Edition 9 December, 2010 Copyright © 2010 FEI Company All rights reserved Trademark Acknowledgments FrameMaker™ is a trademark of Adobe Systems Incorporated. Microsoft® is a registered trademark of Microsoft Corporation. Windows XP™ is a trademark of Microsoft Corporation. Production Acknowledgments This manual was produced using FrameMaker™ document publishing software Technical Author Martin Dufek TABLE OF CONTENTS Chapter 1 System Overview User Manuals . 1-1 FEI Microscope Systems Safety Manual . 1-1 User Operation Manual. 1-1 System Capabilities. 1-2 System Performance . 1-3 Computer Control . 1-4 Vacuum System. 1-4 Stage . 1-4 Image Viewing and Capture . 1-4 Beams Control. 1-4 Gas Injection System (GIS) . 1-5 Analysis Capability. 1-5 Chapter 2 System Control Interface Elements . 2-1 Software . 2-1 Hardware . 2-1 Microscope Console Control Panel . 2-2 Vacuum System . 2-3 Vacuum Status . 2-3 Pump button . 2-4 Vent button . 2-4 System States . 2-5 Power Off . 2-8 Emergency Off. 2-8 Equipments . 2-9 Detector Types and Usage . 2-9 Stages. 2-10 X-section Sample Holder. 2-10 Loadlock . 2-11 Multiloader . 2-11 Stage movement limits . 2-12 Chapter 3 Software Control Software Interface. 3-1 Other Software and Hardware . 3-1 Software Interface Elements. 3-2 Icons . 3-2 Tool-Tips . 3-2 Pull-down Menus . 3-2 Using the Mouse . 3-2 Using the Keyboard . 3-2 Command Buttons . 3-3 List Boxes . 3-3 Property Editors . 3-3 Edit Boxes. 3-3 Radio Buttons / Check Boxes . -

Detailed Instructions Digital Voice Recorder
DIGITAL VOICE RECORDER DETAILED INSTRUCTIONS Thank you for purchasing an Olympus Digital Voice Recorder. Please read these instructions for information about using the product correctly and safely. Keep the instructions handy for future reference. To ensure successful recordings, we recommend that you test the record function and volume before use. Register your product on www.olympus-consumer.com/register and get additional benefits from Olympus! EN Introduction • The contents of this document may be changed in the future without advanced notice. Contact our Customer Support Center for the latest information relating to product names and model numbers. • The utmost care has been taken to ensure the integrity of the contents of this document. In the unlikely event that a questionable item, error, or omission is found, please contact our Customer Support Center. • Any liability for passive damages or damage of any kind occurred due to data loss incurred by a defect of the product, repair performed by the third party other than Olympus or an Olympus authorized service station, or any other reason is excluded. Trademarks and registered trademarks • IBM and PC/AT are the trademarks or registered trademarks of International Business Machines Corporation. • Microsoft, Windows and Windows Media are registered trademarks of Microsoft Corporation. • Macintosh and iTunes are the trademarks of Apple Inc. • MPEG Layer-3 audio coding technology licensed from Fraunhofer IIS and Thomson. • SRS WOW XT, SRS and } symbol are trademarks of SRS Labs, Inc. • SRS WOW XT technology is incorporated under license from SRS Labs, Inc. • The product was developed based on noise-canceling technology under license from NEC Corporation. -

33 - 400S) Middle Ages (500S – 1400S) Reformation (1500S - 1600S) Modern (1700S - Today) the Church
The Church: Early Middle Ages Reformation Modern The Church: Early (33 - 400s) Middle Ages (500s – 1400s) Reformation (1500s - 1600s) Modern (1700s - Today) The Church: Early (33 - 400s) Middle Ages (500s – 1400s) Reformation (1500s - 1600s) Modern (1700s - Today) Early (33 - 400s) 33ad – Pentecost Acts 2:8-11 Acts 2:41 – – “we hear them “there were telling in our added that own tongues day about the mighty 3,000 souls.” works of God.” Early (33 - 400s) 35ad – Stephen is stoned Later Acts 8:1 – - Jude -- Armenia “that day.. Thomas -- India they were Matthew -- Ethiopia all Andrew -- Asia Min John -- Ephesus scattered..” Peter --Syria Early (33 - 400s) 35ad – Conversion of Paul 50ad.. 46ad.. – – 13 (+) Three Epistles in Missionary New Journeys Testament Early (33 - 400s) 64ad – Nero and Fire in Rome 67ad 67ad – – DEATH DEATH of of Paul Peter (upside down (beheading) crucifixion) Early (33 - 400s) 70s-90s ad – Early Heresies Ebionism Docetism – – “JESUS is “JESUS is human, not divine, not divine.” human.” Early (33 - 400s) -100+ ad – Apostolic Fathers Clemente ‘Didache’ Ignatius ‘Shepherd Polycarp of Hermas’ Phil. 4:3 - “..together with Clement and the rest of my fellow workers.” Early (33 - 400s) 81-117ad –Persecution Domitian Trajan (81-96) (98-117) – – Demanded Sanctioned worship of self, persecutions, persecuted Martyred Apostle John Ignatius in (boiling oil, Colosseum Patmos) with 2 lions. Early (33 - 400s) 125ad – Gnosticism Spreads Salvation ‘Gnosis’ Those with Knowledge; secret Hidden, Secret knowledge are Wisdom. saved. Early (33 - 400s) 100-202ad –Justin and Ireneaus Justin Ireneaus – – 1st Christian Wrote ‘Against Apologist, used Heresies’ Greek philosophy (eg, Gnosticism), attacked Spiritual Gnosticism, grandson of Called ‘the Apostle John Martyr’ Early (33 - 400s) 213,225ad – Tertullian & Origen 213ad 225ad Wrote in Latin, Wrote the first the common Systematic language. -

PARTS PRICE LIST L 3/1/16 Parts Multiplier Rev
RITE ENGINEERING & MFG. CORP. 5832 GARFIELD AVE. COMMERCE, CA 90040 Tel: 562-862-2135 Fax.562-861-9821 PARTS PRICE LIST L 3/1/16 Parts Multiplier Rev. 6 Boiler Serial Number required on all Parts Orders HEADPLATE GASKETS FOR ATMOSPHERIC WATER BOILERS BOILER MODELS PART NUMBER LIST PRICE 15 through 42 21W (two required) 48 through 76 & A90 33W “ 85-200 except “A” prefix 53W “ A150, A165, A180, A200 84W “ 225-500 except “A” prefix 84W “ 550, 600, A650, A700, A750 122W “ A400, A450, A500, A550, A600, 650, 700, 750 148W “ 840 through 1250 188W “ HEADPLATE GASKETS FOR POWER BURNER FIRED WATER BOILERS BOILER MODELS PART NUMBER LIST PRICE 15 through 42 21W (two required) 48 through 76 33W “ 85 through 200 except “A” prefix 53W “ A150, A165, A180, A200, 84W “ 225 through 375 84W “ 400 through 600 except A prefix,but including A650, A700,A750 122W “ A400, A450, A500, A550, A600, 650,700, 750 148W “ 840 through 1250 188W “ HEADPLATE GASKETS FOR 15 PSIG LOW PRESSURE STEAM & HIGH “E” BOILERS BOILER MODELS PART NUMBER LIST PRICE 15S through 42S 21S (two required) 48S through 76S, 48E through 76E & A90 33S “ 85S through 200S, 85E through 200E, except “A” prefix 53S “ A150 S&E, A165 S&E, A180 S&E, A200 S&E, 225 S&E 84S “ through 375 S&E and 400E, 425E, 450E, 475E, and 500E 400S through 600S except “A” prefix, but including A650S, 122S “ A700S, A750S, 550E, 600E, A650E, A700E, and A750E A400 S&E, A450 S&E, A500 S&E, A550 S&E, A600 S&E, 148S “ 650 S&E, 700 S&E, 750 S&E 840S through 1250S & 840E through 1250E 188S “ HEADPLATE GASKETS FOR 150 PSIG HIGH PRESSURE STEAM “P” BOILERS BOILER MODELS PART NUMBER LIST PRICE P9.5 through P20 P___ Gasket (2 req’d) P25 through P50 P___ Gasket “ P75 through P125 P___ Gasket “ P150 through P250 (Specify front or rear) P___ Gasket “ HEADPLATE GASKETS FOR DURAFIN “D” WATER BOILERS DESCRIPTION PART NUMBER LIST PRICE D300 through D2500 D___ Gasket (2 req’d) DA2000 through D5000 D___ Gasket “ D5500 through D7500 D___ Gasket “ D8000 through D10000 D___ Gasket “ - 1 - RITE ENGINEERING & MFG. -
22596 Applications 22596-A001 to 22596-A007
Notice Applications for ATCO Heartland Generating Station Interconnection in the Strathcona County area have been received Proceeding 22596 Applications 22596-A001 to 22596-A007 The Alberta Utilities Commission, the independent utilities regulator, will be considering the electric transmission development applications in Proceeding 22596. If you feel you may be affected by these applications, you can provide input to the AUC to review before it makes its decision. The Alberta Electric System Operator has applied for approval of the need to connect the ATCO Heartland Generating Station to the Josephburg 410S Substation, under the Electric Utilities Act. AltaLink Management Ltd., under the Hydro and Electric Energy Act, has applied in a joint application to construct the facilities to meet the need identified by the Alberta Electric System Operator. The project consists of constructing approximately 5.6 kilometres of new 240-kilovolt (kV) transmission line 1181L from the existing Josephburg 410S Substation to the approved ATCO Power Lamont 400S at the Heartland Generating Station. AltaLink has proposed a preferred route for the 1181L Transmission Line as well as a preferred variant route which can be seen on the attached map. The project also includes upgrades to the existing Josephburg 410S Substation and modifications to the existing 807L, 997L, and 1120L transmission lines. Additional information about the applications For full application details visit the AUC website, log on to the eFiling System, enter the proceeding number and select go. The project includes: Construction of one single-circuit 240-kV transmission line (1181L) approximately 5.6 kilometres in length to connect ATCO Power’s approved Lamont 400S Substation to the existing Josephburg 410S Substation. -

Chapter 9: Roman Civilization
298-301 CH 9 CO-824133 3/16/04 4:33 PM Page 298 Roman 298–299 Picture Finders Ltd./eStock Civilization The Colosseum in Rome, Italy 100 B.C. A.D. 100 A.D. 300 A.D. 500 c. 10 B.C. A.D.395 A.D.527 Livy writes his Roman Empire Emperor History of Rome divided into eastern Justinian and western parts begins rule 298-301 CH 9 CO-824133 3/16/04 4:35 PM Page 299 Chapter Overview Visit Chapter Preview jat.glencoe.com for a preview The Romans developed a civilization as well as an of Chapter 9. empire. Read this chapter to find out about Roman achievements that still influence your life today. View the Chapter 9 video in the World History: Journey Across Time Video Program. Life in Ancient Rome The Romans learned from the Greeks but changed what they borrowed to suit their own needs. The lives of rich and poor Romans were very different. The Fall of Rome Rome finally fell when Germanic invaders swept through the empire in the A.D. 400s. Roman achievements in government, law, language, and the arts are still important today. The Byzantine Empire As the Western Roman Empire fell, the Eastern Roman, or Byzantine, Empire grew rich and powerful. The Byzantines developed a culture based on Roman, Greek, and Christian ideas. Organizing Information Make this foldable to help you organize and analyze information by asking yourself questions about Roman civilization. Step 1 Fold a sheet of Step 2 Turn the paper Reading and Writing paper into thirds from horizontally, unfold, and As you read the chapter, top to bottom. -

About Invasions of Roman Empire
CK_4_TH_HG_P087_242.QXD 10/6/05 9:02 AM Page 110 II. Europe in the Middle Ages Ireland is bordered by the Atlantic Ocean on the west and the Irish Sea on the east. The Irish Sea separates Ireland from England and Wales. The North Channel lies between Northern Ireland and Scotland. England is separated from France and Europe by the English Channel, a body of water that connects the Atlantic Ocean and the North Sea. Its northern end is called the Strait of Dover, and north of that is the North Sea. The North Sea sep- arates northern England and Scotland from Norway, Denmark, and other coun- tries in northwestern Europe. The English Channel is 300 miles (483 km) long and is an arm of the Atlantic Ocean. At its narrowest, the Channel is 21 miles (34 km) wide and at its widest, 112 miles (180 km). The fact that Great Britain is an island has been of great strategic importance in its history. After William the Conqueror and his Normans attacked in 1066, no army has invaded it since. Separated from Europe, Great Britain was able to insulate itself from some of the political and social movements that swirled across Europe. B. Background Invasions of the Roman Empire Teaching Idea The Middle Ages progressed directly out of the Roman Empire. Rome went from a republic to a vibrant expansive empire that spanned much of Europe, If there are any football fans in your North Africa, and the Middle East. But eventually the empire declined. class, ask them to explain what “sack Corruption and pressure from Germanic and other invaders eventually brought the quarterback” means (tackle the the fall of the Western Roman Empire in 476 CE. -
ABS Digimatic Indicator ID-C
Small Tool Instruments and Data Management Standard Digital Indicator ABS Digimatic Indicator ID-C Bulletin No. 1966 Digital indicators offer dramatically improved readability, usability and functionality Digital indicators that offer dramatically improved ease of reading measurement values, usability and functionality ABS Digimatic Indicator ID-C The Nakatsugawa plant is in the central industrial park of beautiful Nakatsugawa city, in the Gifu prefecture. This plant specializes in manufacturing sensor products and handles the complete development-to-production cycle for measuring instruments such as dial gages, test indicators, Digimatic indicators, and bore gages. It was opened in 1997 as the 12th Mitutoyo plant in Japan. Using its state-of-the-art production techniques and facilities, this plant continues to provide Mitutoyo products that are praised around the world and used with confidence. Actual Actual Actual size size size 543-392B 543-472B 543-492B ABS Digimatic indicator ID-C is a standard digital indicator. A large Examples of use LCD incorporating 11mm characters (existing products: 8.5mm) is used to improve visibility, and three large, easy-to-press buttons are used in the design to make operations easier to perform. In addition, this affordable product has various measurement functions, including the ability to perform scaling calculations, judge tolerance, hold data, and perform general comparison measurements. 2 Digital indicators that offer dramatically improved ease of reading measurement values, usability and functionality ABS Digimatic Indicator ID-C 1. Large LCD 4. Functions that support measurement The large LCD incorporates The ID-C has various functions, 11mm characters giving 1.5 including the ability to hold data, times the character area of output data, switch the measuring Measurement value and tolerance judgment existing products (which display 11mm direction, judge tolerance, change 8.5mm characters) making the scale factor, and a lock to prevent measurement values much misoperation.