Underwater Optical Imaging: Status and Prospects
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

THE PHYSICIAN's GUIDE to DIVING MEDICINE the PHYSICIAN's GUIDE to DIVING MEDICINE Tt",,.,,,,., , ••••••••••• ,
THE PHYSICIAN'S GUIDE TO DIVING MEDICINE THE PHYSICIAN'S GUIDE TO DIVING MEDICINE tt",,.,,,,., , ••••••••••• , ......... ,.", •••••••••••••••••••••••• ,. ••. ' ••••••••••• " .............. .. Edited by Charles W. Shilling Catherine B. Carlston and Rosemary A. Mathias Undersea Medical Society Bethesda, Maryland PLENUM PRESS • NEW YORK AND LONDON Library of Congress Cataloging in Publication Data Main entry under title: The Physician's guide to diving medicine. Includes bibliographies and index. 1. Submarine medicine. 2. Diving, Submarine-Physiological aspects. I. Shilling, Charles W. (Charles Wesley) II. Carlston, Catherine B. III. Mathias, Rosemary A. IV. Undersea Medical Society. [DNLM: 1. Diving. 2. Submarine Medicine. WD 650 P577] RC1005.P49 1984 616.9'8022 84-14817 ISBN-13: 978-1-4612-9663-8 e-ISBN-13: 978-1-4613-2671-7 DOl: 10.1007/978-1-4613-2671-7 This limited facsimile edition has been issued for the purpose of keeping this title available to the scientific community. 10987654 ©1984 Plenum Press, New York A Division of Plenum Publishing Corporation 233 Spring Street, New York, N.Y. 10013 All rights reserved No part of this book may be reproduced, stored in a retrieval system, or transmitted in any form or by any means, electronic, mechanical, photocopying, microfilming, recording, or otherwise, without written permission from the Publisher Contributors The contributors who authored this book are listed alphabetically below. Their names also appear in the text following contributed chapters or sections. N. R. Anthonisen. M.D .. Ph.D. Professor of Medicine University of Manitoba Winnipeg. Manitoba. Canada Arthur J. Bachrach. Ph.D. Director. Environmental Stress Program Naval Medical Research Institute Bethesda. Maryland C. Gresham Bayne. -

Underwater Photography Made Easy
Underwater Photography Made Easy Create amazing photos & video with by Annie Crawley IncludingIncluding highhigh definitiondefinition videovideo andand photophoto galleriesgalleries toto showshow youyou positioningpositioning andand bestbest techniques!techniques! BY ANNIE CRAWLEY SeaLife Cameras Perfect for every environment whether you are headed on a tropical vacation or diving the Puget Sound. These cameras meet all of your imaging needs! ©2013 Annie Crawley www.Sealife-cameras.com www.DiveIntoYourImagination.com Edmonds Underwater Park, Washington All rights reserved. This interactive book, or parts thereof, may not be reproduced in any form without permission in writing from the publisher, Dive Into Your Imagination, LLC a company founded by Annie Crawley committed to change the way a new generation views the Ocean and themselves. Dive Into Your Imagination, Reg. Pat. & Tm. Off. Underwater Photography Made Easy shows you how to take great photos and video with your SeaLife camera system. After our introduction to this interactive book you will learn: 1. Easy to apply tips and tricks to help you create great images. 2. Five quick review steps to make sure your SeaLife camera system is ready before every dive. 3. Neutral buoyancy tips to help you take great underwater photos & video with your SeaLife camera system. 4. Macro and wide angle photography and video basics including color, composition, understanding the rule of thirds, leading diagonals, foreground and background considerations, plus lighting with strobes and video lights. 5. Techniques for both temperate and tropical waters, how to photograph divers, fish behavior and interaction shots, the difference in capturing animal portraits versus recording action in video. You will learn how to capture sharks, turtles, dolphins, clownfish, plus so much more. -

Deep Sea Dive Ebook Free Download
DEEP SEA DIVE PDF, EPUB, EBOOK Frank Lampard | 112 pages | 07 Apr 2016 | Hachette Children's Group | 9780349132136 | English | London, United Kingdom Deep Sea Dive PDF Book Zombie Worm. Marrus orthocanna. Deep diving can mean something else in the commercial diving field. They can be found all over the world. Depth at which breathing compressed air exposes the diver to an oxygen partial pressure of 1. Retrieved 31 May Diving medicine. Arthur J. Retrieved 13 March Although commercial and military divers often operate at those depths, or even deeper, they are surface supplied. Minimal visibility is still possible far deeper. The temperature is rising in the ocean and we still don't know what kind of an impact that will have on the many species that exist in the ocean. Guiel Jr. His dive was aborted due to equipment failure. Smithsonian Institution, Washington, DC. Depth limit for a group of 2 to 3 French Level 3 recreational divers, breathing air. Underwater diving to a depth beyond the norm accepted by the associated community. Limpet mine Speargun Hawaiian sling Polespear. Michele Geraci [42]. Diving safety. Retrieved 19 September All of these considerations result in the amount of breathing gas required for deep diving being much greater than for shallow open water diving. King Crab. Atrial septal defect Effects of drugs on fitness to dive Fitness to dive Psychological fitness to dive. The bottom part which has the pilot sphere inside. List of diving environments by type Altitude diving Benign water diving Confined water diving Deep diving Inland diving Inshore diving Muck diving Night diving Open-water diving Black-water diving Blue-water diving Penetration diving Cave diving Ice diving Wreck diving Recreational dive sites Underwater environment. -

Underwater Photographyphotography a Web Magazine
UnderwaterUnderwater PhotographyPhotography a web magazine Oct/Nov 2002 Nikon D100 housings Fuji S2 housing Sony F707 housing Kodak DCS Pro 14n Sperm whale Nai’a liveaboard U/w photojournalist - Jack Jackson Henry the seadragon Scilly Seals Lights & divers Easy macro British fish Underwater tripod Visions 2002 UwP 1 What links these sites? Turn to page 7 to find out... UwP 2 UnderwaterUnderwater PhotographyPhotography a web magazine Oct/Nov 2002 e mail [email protected] Contents 4 Travel & events 30 Meet Henry 43 Easy macro 8 New products 14 Sperm whale by Andy & Angela Heath with Ee wan Khoo 35 Scilly Seals 47 British fish with Tony Wu 19 Nai’a liveaboard with Will & Demelza by Mark Webster Posslethwaite 54 Size matters 35 Lights & divers by Jukka Nurminen & Alex Mustard by Pete Atkinson 25 U/w photojournalist by Martin Edge Cover photo by Tony Wu 58 Visions 2002 by Jack Jackson UwP 3 Travel & events Jim Breakell Tahiti talk at Dive Show, Oct 12/13 2002 In September Jim Breakell of Scuba Safaris went on a fact finding trip to the Pacific. First off he went to Ryrutu for for a few days humpback whale watching, then a week on the inaugural trip of the Tahiti Aggressor and then on to Bora Bora (what a hard life he has!) He will be giving an illustrated talk about his trip at the Dive Show in Birmingham on October 12/13th 2002. For more information contact Scuba Safaris, PO Box 8, Edenbridge, Kent TN8 7ZS. Tel 01342 851196. www.scuba-safaris.com John Boyle video trip May 2003 INVITATION John Boyle will be hosting a video diving trip from Bali to Komodo on Kararu next year. -

'The Last of the Earth's Frontiers': Sealab, the Aquanaut, and the US
‘The Last of the earth’s frontiers’: Sealab, the Aquanaut, and the US Navy’s battle against the sub-marine Rachael Squire Department of Geography Royal Holloway, University of London Submitted in accordance with the requirements for the degree of PhD, University of London, 2017 Declaration of Authorship I, Rachael Squire, hereby declare that this thesis and the work presented in it is entirely my own. Where I have consulted the work of others, this is always clearly stated. Signed: ___Rachael Squire_______ Date: __________9.5.17________ 2 Contents Declaration…………………………………………………………………………………………………………. 2 Abstract……………………………………………………………………………………………………………… 5 Acknowledgements …………………………………………………………………………………………… 6 List of figures……………………………………………………………………………………………………… 8 List of abbreviations…………………………………………………………………………………………… 12 Preface: Charting a course: From the Bay of Gibraltar to La Jolla Submarine Canyon……………………………………………………………………………………………………………… 13 The Sealab Prayer………………………………………………………………………………………………. 18 Chapter 1: Introducing Sealab …………………………………………………………………………… 19 1.0 Introduction………………………………………………………………………………….... 20 1.1 Empirical and conceptual opportunities ……………………....................... 24 1.2 Thesis overview………………………………………………………………………………. 30 1.3 People and projects: a glossary of the key actors in Sealab……………… 33 Chapter 2: Geography in and on the sea: towards an elemental geopolitics of the sub-marine …………………………………………………………………………………………………. 39 2.0 Introduction……………………………………………………………………………………. 40 2.1 The sea in geography………………………………………………………………………. -
Dive Log Australia
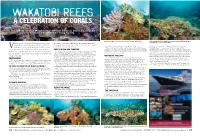
WAKATOBI REEFS A CELEBRATION OF CORALS The famous resort of Wakatobi in South East Sulawesi, Indonesia, probably needs no introduction for many readers. The shallow reef flats in 1 or 2 meters are a great place to start Blue waters swirl above and a hint of clouds in a blue sky prevail. Early morning shafts of sunlight bathe a coral head with light producing a surreal image of corals in the sunlight. eteran pioneer Australian Underwater Photographer the idyllic location and accommodation, the wonderful hospitality, Kevin Deacon decided to forgo all other genres of the range of dive sites, dive boat facilities and all round diver support, one will not suffer for their art here! clown fish and fast growing Acropora & soft corals. produced a portfolio that I believe is faithful to the genre of Vunderwater photography during his most recent tour While cruising this area the creative mind must be fully engaged "Beautiful Reefs". I hope you enjoy these images and the to concentrate on capturing the simple beauty of Wakatobi REEF HUNTING AND SHOOTING looking for the right coral reef elements. By its very nature coral reefs information here helps you on your way as a `Master of the Light’. Indo Pacific coral reefs. A task not as simple as it might seem Creating such images comes with some great challenges. Cruising and their inhabitants are designed to create confusion to the eye, all Kevin Deacon is one of the pioneers of underwater photography in but the resulting images illustrate the value in the age old rule, a coral reef leaves one with an impression of living beauty with part of nature's survival strategy. -

Underwater Survey for Oil and Gas Industry: a Review of Close Range Optical Methods
remote sensing Review Underwater Survey for Oil and Gas Industry: A Review of Close Range Optical Methods Bertrand Chemisky 1,*, Fabio Menna 2 , Erica Nocerino 1 and Pierre Drap 1 1 LIS UMR 7020, Aix-Marseille Université, CNRS, Université De Toulon, 13397 Marseille, France; [email protected] (E.N.); [email protected] (P.D.) 2 3D Optical Metrology (3DOM) Unit, Bruno Kessler Foundation (FBK), Via Sommarive 18, 38123 Trento, Italy; [email protected] * Correspondence: [email protected] Abstract: In both the industrial and scientific fields, the need for very high-resolution cartographic data is constantly increasing. With the aging of offshore subsea assets, it is very important to plan and maintain the longevity of structures, equipment, and systems. Inspection, maintenance, and repair (IMR) of subsea structures are key components of an overall integrity management system that aims to reduce the risk of failure and extend the life of installations. The acquisition of very detailed data during the inspection phase is a technological challenge, especially since offshore installations are sometimes deployed in extreme conditions (e.g., depth, hydrodynamics, visibility). After a review of high resolution mapping techniques for underwater environment, this article will focus on optical sensors that can satisfy the requirements of the offshore industry by assessing their relevance and degree of maturity. These requirements concern the resolution and accuracy but also cost, ease of implementation, and qualification. With the evolution of embedded computing resources, in-vehicle optical survey solutions are becoming increasingly important in the landscape of large-scale mapping solutions and more and more off-the-shelf systems are now available. -

Future Vision for Autonomous Ocean Observations
fmars-07-00697 September 6, 2020 Time: 20:42 # 1 REVIEW published: 08 September 2020 doi: 10.3389/fmars.2020.00697 Future Vision for Autonomous Ocean Observations Christopher Whitt1*, Jay Pearlman2, Brian Polagye3, Frank Caimi4, Frank Muller-Karger5, Andrea Copping6, Heather Spence7, Shyam Madhusudhana8, William Kirkwood9, Ludovic Grosjean10, Bilal Muhammad Fiaz10, Satinder Singh10, Sikandra Singh10, Dana Manalang11, Ananya Sen Gupta12, Alain Maguer13, Justin J. H. Buck14, Andreas Marouchos15, Malayath Aravindakshan Atmanand16, Ramasamy Venkatesan16, Vedachalam Narayanaswamy16, Pierre Testor17, Elizabeth Douglas18, Sebastien de Halleux18 and Siri Jodha Khalsa19 1 JASCO Applied Sciences, Dartmouth, NS, Canada, 2 FourBridges, Port Angeles, WA, United States, 3 Department of Mechanical Engineering, Pacific Marine Energy Center, University of Washington, Seattle, WA, United States, 4 Harbor Branch Oceanographic Institute, Florida Atlantic University, Fort Pierce, FL, United States, 5 College of Marine Science, University of South Florida, St. Petersburg, FL, United States, 6 Pacific Northwest National Laboratory, Seattle, WA, United States, 7 AAAS Science and Technology Policy Fellowship, Water Power Technologies Office, United States Edited by: Department of Energy, Washington, DC, United States, 8 Center for Conservation Bioacoustics, Cornell Lab of Ornithology, Ananda Pascual, Cornell University, Ithaca, NY, United States, 9 Monterey Bay Aquarium Research Institute, Moss Landing, CA, United States, Mediterranean Institute for Advanced 10 OceanX -

Imaging the Twilight Zone: the Morphology And
IMAGING THE TWILIGHT ZONE: THE MORPHOLOGY AND DISTRIBUTION OF MESOPHOTIC ZONE FEATURES, A CASE STUDY FROM BONAIRE, DUTCH CARIBBEAN by Bryan Mark Keller A thesis submitted to the Faculty of the University of Delaware in partial fulfillment of the requirements for the degree of Master of Science in Marine Studies Spring 2011 Copyright 2011 Bryan M. Keller All Rights Reserved IMAGING THE TWILIGHT ZONE: THE MORPHOLOGY AND DISTRIBUTION OF MESOPHOTIC ZONE FEATURES, A CASE STUDY FROM BONAIRE, DUTCH CARIBBEAN by Bryan Mark Keller Approved: _____________________________________________________ Arthur C. Trembanis, Ph.D. Professor in charge of thesis on behalf of the Advisory Committee Approved: _____________________________________________________ Charles E. Epifanio, Ph.D. Director of the School of Marine Science and Policy Approved: _____________________________________________________ Nancy M. Targett, Ph.D. Dean of the College of Earth, Ocean, and Environment Approved: _____________________________________________________ Charles G. Riordan, Ph.D. Vice Provost for Graduate and Professional Education ACKNOWLEDGMENTS I would like to thank my advisor, Dr. Art Trembanis, for his instruction and support throughout my thesis research. My gratitude is also extended to Dr. Douglas Miller and Dr. Mark Patterson for their assistance and guidance throughout the entirety of my research. Much thanks to the University of Delaware Office of Graduate and Professional Education, the Department of Oceanography, and the Department of Geology for the funding necessary for me to perform m fieldwork in Bonaire. Finally, I would like to thank my lab mates and colleagues for answering my countless questions and always being willing to provide insight about any problems that I faced. iii DEDICATION This manuscript is dedicated to Rachel Lyons who has known me through all of my struggles and always insisted that I chase my dreams. -

Chapter 6 Underwater Photography
Chapter 6 Underwater Photography It is hard to imagine a more difficult endeavor than taking pictures underwater. You have to be at least partially crazy to get involved in it, and if you are not crazy when you start, it is virtually guaranteed to make you crazy. First, you have to learn to survive in an alien environment. Before you even think about the highly specialized photographic equipment required, you have to learn how to safely breathe and move about underwater. That means you have to become a certified diver. The most important qualification required to become a good underwater photographer is to be a good diver. You can’t worry about things like f- stops, depth of field, shutter speeds, exposure, point of focus, and other technical photographic stuff if you are not comfortable underwater. Things like breath and buoyancy control, awareness of time, depth and tank air pressure, must become second nature, like shifting while driving a car with a manual transmission. Underwater photography, even with excellent diving skills, state-of-the-art equipment, and plentiful subjects, is still a very low batting average endeavor. You fail much more often than you succeed. That means that you discard a lot more images than you keep. But the occasional “keeper” can make up for all the throwaways. Underwater photography offers the highest highs, and the lowest lows of any endeavor I know. Everything in underwater photography is stacked against success. First, unlike taking pictures topside, you have a very limited amount of time to capture your image (before you have to surface or drown.) Whatever underwater subject you are seeking on each dive, you have to find it in less than an hour, you can’t hang around all day waiting for something to appear. -

Articles and Plankton
Ocean Sci., 15, 1327–1340, 2019 https://doi.org/10.5194/os-15-1327-2019 © Author(s) 2019. This work is distributed under the Creative Commons Attribution 4.0 License. The Pelagic In situ Observation System (PELAGIOS) to reveal biodiversity, behavior, and ecology of elusive oceanic fauna Henk-Jan Hoving1, Svenja Christiansen2, Eduard Fabrizius1, Helena Hauss1, Rainer Kiko1, Peter Linke1, Philipp Neitzel1, Uwe Piatkowski1, and Arne Körtzinger1,3 1GEOMAR, Helmholtz Centre for Ocean Research Kiel, Düsternbrooker Weg 20, 24105 Kiel, Germany 2University of Oslo, Blindernveien 31, 0371 Oslo, Norway 3Christian Albrecht University Kiel, Christian-Albrechts-Platz 4, 24118 Kiel, Germany Correspondence: Henk-Jan Hoving ([email protected]) Received: 16 November 2018 – Discussion started: 10 December 2018 Revised: 11 June 2019 – Accepted: 17 June 2019 – Published: 7 October 2019 Abstract. There is a need for cost-efficient tools to explore 1 Introduction deep-ocean ecosystems to collect baseline biological obser- vations on pelagic fauna (zooplankton and nekton) and es- The open-ocean pelagic zones include the largest, yet least tablish the vertical ecological zonation in the deep sea. The explored habitats on the planet (Robison, 2004; Webb et Pelagic In situ Observation System (PELAGIOS) is a 3000 m al., 2010; Ramirez-Llodra et al., 2010). Since the first rated slowly (0.5 m s−1) towed camera system with LED il- oceanographic expeditions, oceanic communities of macro- lumination, an integrated oceanographic sensor set (CTD- zooplankton and micronekton have been sampled using nets O2) and telemetry allowing for online data acquisition and (Wiebe and Benfield, 2003). Such sampling has revealed a video inspection (low definition). -

For Memorable Underwater Photography Thank You for Downloading Our Guide “10 Professional Tips for Memorable Underwater Photography”
10 Professional TIPS for Memorable Underwater Photography Thank you for downloading our guide “10 Professional Tips for Memorable Underwater Photography”. Taking images and videos of beautiful marine life is so very exciting and we are thrilled for you to join the spectacular world of marine photography! Welcome!! Within these pages, you will find tips and helpful suggestions on how to prepare your underwater camera and yourself! Think of it as your guide to everything you need to know to say SAFE and share awesome underwater video and pictures with the world. The information gathered is backed up by our combined 45+ years of field experience of diving, snorkeling, guiding, observing, researching and FILMING the Kona Manta Rays. We hope you enjoy the guide and please consider helping us by sharing it on social media. Let’s dive in…. Warmest Aloha JAMES L. WING MARTINA L. WING Today, you have so many choices when it comes to compact, easy to use underwater cameras. We Tips for see people using GoPro’s, disposable cameras or even IPhones. Underwater Here is the trick though. As much as we want Video and to encourage you to keep a memory of the underwater world, you are operating often in a Pictures low-light environment with fast moving creatures. What your eyes see is not necessarily what your camera captures. BE CONFORTABLE WITH YOUR SNORKEL OR 1TIP DIVE EQUIPMENT SAFETY FIRST! You are leaving the humans’ comfort zone, the place of constant air supply, and you are entering an environment that requires multi- tasking. We recommend mastering your ocean skills and gear before you add the additional task of taking pictures in the ocean with beautiful fish in front of you! WWW.MANTARAYADVOCATES.COM 2 The extra complex task of photography usually results in mediocre imagery and unsafe practices.