Underwater Survey for Oil and Gas Industry: a Review of Close Range Optical Methods
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
XF Camera System User Manual
XF Camera System User Manual XF Camera System Manual | Table of Contents 1 Jump to Table of Contents XF Camera System Manual | Table of Contents 2 Content | XF Camera System Manual Primary parts of the XF Camera System 4 XF Camera System Capture Modes 59 Lens, XF Camera Body, IQ Digital Back 4 XF Camera System Exposure Modes 61 Dials, Buttons and Touch Screen Interface 6 Lens, XF Camera Body, IQ Digital Back 6 Exposure Compensation 63 Assembling the XF Camera System 8 Long Exposure 64 Digital Back and camera body modularity 8 Electronic Shutter (ES) 65 Readying the camera system 10 General advice for using the battery and charger 11 Live View 67 Live View on the LCD, Capture One or HDMI monitor 67 Navigating the XF Camera System 14 XF Camera Body Controls 15 XF Custom Presets and System Backup 70 Customizing buttons and dials 18 Flash Photography 73 Profoto Remote Tool 74 OneTouch User Interface Flow Diagram 20 Triggering a Capture with the Profoto Remote 75 XF Camera Menu Overview 20 Flash Analysis Tool 76 IQ Digital Back Menu Overview 22 Rear Curtain sync and Trim 76 Shutter Mechanisms and Flash Synchronization range 77 OneTouch User Interface Overview 25 XF Camera Body Navigation 25 XF Camera System Lenses 78 Top Touch Screen Display 26 Capture One Pro 79 XF Tools on the Top Touch Screen 28 Capture One Tethered Use 82 IQ Digital Back Navigation 33 IQ Digital Back Navigation Shortcuts 34 Built-In WiFi and Capture Pilot 84 IQ Digital Back Viewing images 34 A-series Camera System 87 IQ Digital Back Contextual Menu 35 Overview of Contextual -

Underwater Photography Made Easy
Underwater Photography Made Easy Create amazing photos & video with by Annie Crawley IncludingIncluding highhigh definitiondefinition videovideo andand photophoto galleriesgalleries toto showshow youyou positioningpositioning andand bestbest techniques!techniques! BY ANNIE CRAWLEY SeaLife Cameras Perfect for every environment whether you are headed on a tropical vacation or diving the Puget Sound. These cameras meet all of your imaging needs! ©2013 Annie Crawley www.Sealife-cameras.com www.DiveIntoYourImagination.com Edmonds Underwater Park, Washington All rights reserved. This interactive book, or parts thereof, may not be reproduced in any form without permission in writing from the publisher, Dive Into Your Imagination, LLC a company founded by Annie Crawley committed to change the way a new generation views the Ocean and themselves. Dive Into Your Imagination, Reg. Pat. & Tm. Off. Underwater Photography Made Easy shows you how to take great photos and video with your SeaLife camera system. After our introduction to this interactive book you will learn: 1. Easy to apply tips and tricks to help you create great images. 2. Five quick review steps to make sure your SeaLife camera system is ready before every dive. 3. Neutral buoyancy tips to help you take great underwater photos & video with your SeaLife camera system. 4. Macro and wide angle photography and video basics including color, composition, understanding the rule of thirds, leading diagonals, foreground and background considerations, plus lighting with strobes and video lights. 5. Techniques for both temperate and tropical waters, how to photograph divers, fish behavior and interaction shots, the difference in capturing animal portraits versus recording action in video. You will learn how to capture sharks, turtles, dolphins, clownfish, plus so much more. -

Real-Time Geopotentiometry with Synchronously Linked Optical Lattice Clocks
1 Real-time geopotentiometry with synchronously linked optical lattice clocks Tetsushi Takano1,2, Masao Takamoto2,3,4, Ichiro Ushijima2,3,4, Noriaki Ohmae1,2,3, Tomoya Akatsuka2,3,4, Atsushi Yamaguchi2,3,4, Yuki Kuroishi5, Hiroshi Munekane5, Basara Miyahara5 & Hidetoshi Katori1,2,3,4 1Department of Applied Physics, Graduate School of Engineering, The University of Tokyo, Bunkyo-ku, Tokyo 113-8656, Japan. 2Innovative Space-Time Project, ERATO, Japan Science and Technology Agency, Bunkyo-ku, Tokyo 113-8656, Japan. 3Quantum Metrology Laboratory, RIKEN, Wako-shi, Saitama 351-0198, Japan. 4RIKEN Center for Advanced Photonics, Wako-shi, Saitama 351-0198, Japan. 5Geospatial Information Authority of Japan, Tsukuba-shi, Ibaraki 305-0811, Japan. According to the Einstein’s theory of relativity, the passage of time changes in a gravitational field1,2. On earth, raising a clock by one centimetre increases its tick rate by 1.1 parts in 1018, enabling optical clocks1,3,4 to perform precision geodesy5. Here, we demonstrate geopotentiometry by determining the height difference of master and slave clocks4 separated by 15 km with uncertainty of 5 cm. The subharmonic of the master clock is delivered through a telecom fibre6 to phase- lock and synchronously interrogate7 the slave clock. This protocol rejects laser noise in the comparison of two clocks, which improves the stability of measuring the gravitational red shift. Such phase-coherently operated clocks facilitate proposals for linking clocks8,9 and interferometers10. Over half a year, 11 2 measurements determine the fractional frequency difference between the two clocks to be 1,652.9(5.9)×10-18, or a height difference of 1,516(5) cm, consistent with an independent measurement by levelling and gravimetry. -

Underwater Photographyphotography a Web Magazine
UnderwaterUnderwater PhotographyPhotography a web magazine Oct/Nov 2002 Nikon D100 housings Fuji S2 housing Sony F707 housing Kodak DCS Pro 14n Sperm whale Nai’a liveaboard U/w photojournalist - Jack Jackson Henry the seadragon Scilly Seals Lights & divers Easy macro British fish Underwater tripod Visions 2002 UwP 1 What links these sites? Turn to page 7 to find out... UwP 2 UnderwaterUnderwater PhotographyPhotography a web magazine Oct/Nov 2002 e mail [email protected] Contents 4 Travel & events 30 Meet Henry 43 Easy macro 8 New products 14 Sperm whale by Andy & Angela Heath with Ee wan Khoo 35 Scilly Seals 47 British fish with Tony Wu 19 Nai’a liveaboard with Will & Demelza by Mark Webster Posslethwaite 54 Size matters 35 Lights & divers by Jukka Nurminen & Alex Mustard by Pete Atkinson 25 U/w photojournalist by Martin Edge Cover photo by Tony Wu 58 Visions 2002 by Jack Jackson UwP 3 Travel & events Jim Breakell Tahiti talk at Dive Show, Oct 12/13 2002 In September Jim Breakell of Scuba Safaris went on a fact finding trip to the Pacific. First off he went to Ryrutu for for a few days humpback whale watching, then a week on the inaugural trip of the Tahiti Aggressor and then on to Bora Bora (what a hard life he has!) He will be giving an illustrated talk about his trip at the Dive Show in Birmingham on October 12/13th 2002. For more information contact Scuba Safaris, PO Box 8, Edenbridge, Kent TN8 7ZS. Tel 01342 851196. www.scuba-safaris.com John Boyle video trip May 2003 INVITATION John Boyle will be hosting a video diving trip from Bali to Komodo on Kararu next year. -

Einstein's Gravitational Field
Einstein’s gravitational field Abstract: There exists some confusion, as evidenced in the literature, regarding the nature the gravitational field in Einstein’s General Theory of Relativity. It is argued here that this confusion is a result of a change in interpretation of the gravitational field. Einstein identified the existence of gravity with the inertial motion of accelerating bodies (i.e. bodies in free-fall) whereas contemporary physicists identify the existence of gravity with space-time curvature (i.e. tidal forces). The interpretation of gravity as a curvature in space-time is an interpretation Einstein did not agree with. 1 Author: Peter M. Brown e-mail: [email protected] 2 INTRODUCTION Einstein’s General Theory of Relativity (EGR) has been credited as the greatest intellectual achievement of the 20th Century. This accomplishment is reflected in Time Magazine’s December 31, 1999 issue 1, which declares Einstein the Person of the Century. Indeed, Einstein is often taken as the model of genius for his work in relativity. It is widely assumed that, according to Einstein’s general theory of relativity, gravitation is a curvature in space-time. There is a well- accepted definition of space-time curvature. As stated by Thorne 2 space-time curvature and tidal gravity are the same thing expressed in different languages, the former in the language of relativity, the later in the language of Newtonian gravity. However one of the main tenants of general relativity is the Principle of Equivalence: A uniform gravitational field is equivalent to a uniformly accelerating frame of reference. This implies that one can create a uniform gravitational field simply by changing one’s frame of reference from an inertial frame of reference to an accelerating frame, which is rather difficult idea to accept. -
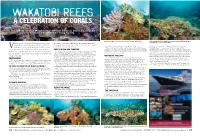
Dive Log Australia
WAKATOBI REEFS A CELEBRATION OF CORALS The famous resort of Wakatobi in South East Sulawesi, Indonesia, probably needs no introduction for many readers. The shallow reef flats in 1 or 2 meters are a great place to start Blue waters swirl above and a hint of clouds in a blue sky prevail. Early morning shafts of sunlight bathe a coral head with light producing a surreal image of corals in the sunlight. eteran pioneer Australian Underwater Photographer the idyllic location and accommodation, the wonderful hospitality, Kevin Deacon decided to forgo all other genres of the range of dive sites, dive boat facilities and all round diver support, one will not suffer for their art here! clown fish and fast growing Acropora & soft corals. produced a portfolio that I believe is faithful to the genre of Vunderwater photography during his most recent tour While cruising this area the creative mind must be fully engaged "Beautiful Reefs". I hope you enjoy these images and the to concentrate on capturing the simple beauty of Wakatobi REEF HUNTING AND SHOOTING looking for the right coral reef elements. By its very nature coral reefs information here helps you on your way as a `Master of the Light’. Indo Pacific coral reefs. A task not as simple as it might seem Creating such images comes with some great challenges. Cruising and their inhabitants are designed to create confusion to the eye, all Kevin Deacon is one of the pioneers of underwater photography in but the resulting images illustrate the value in the age old rule, a coral reef leaves one with an impression of living beauty with part of nature's survival strategy. -

Underwater Optical Imaging: Status and Prospects
Underwater Optical Imaging: Status and Prospects Jules S. Jaffe, Kad D. Moore Scripps Institution of Oceanography. La Jolla, California USA John McLean Arete Associates • Tucson, Arizona USA Michael R Strand Naval Surface Warfare Center. Panama City, Florida USA Introduction As any backyard stargazer knows, one simply has vision, and photography". Subsequent to that, there to look up at the sky on a cloudless night to see light have been several books which have summarized a whose origin was quite a long time ago. Here, due to technical understanding of underwater imaging such as the fact that the mean scattering and absorption Merten's book entitled "In Water Photography" lengths are greater in size than the observable uni- (Mertens, 1970) and a monograph edited by Ferris verse, one can record light from stars whose origin Smith (Smith, 1984). An interesting conference which occurred around the time of the big bang. took place in 1970 resulted in the publication of several Unfortunately for oceanographers, the opacity of sea papers on optics of the sea, including the air water inter- water to light far exceeds these intergalactic limits, face and the in water transmission and imaging of making the job of collecting optical images in the ocean objects (Agard, 1973). In this decade, several books by a difficult task. Russian authors have appeared which treat these prob- Although recent advances in optical imaging tech- lems either in the context of underwater vision theory nology have permitted researchers working in this area (Dolin and Levin, 1991) or imaging through scattering to accomplish projects which could only be dreamed of media (Zege et al., 1991). -

Imaging the Twilight Zone: the Morphology And
IMAGING THE TWILIGHT ZONE: THE MORPHOLOGY AND DISTRIBUTION OF MESOPHOTIC ZONE FEATURES, A CASE STUDY FROM BONAIRE, DUTCH CARIBBEAN by Bryan Mark Keller A thesis submitted to the Faculty of the University of Delaware in partial fulfillment of the requirements for the degree of Master of Science in Marine Studies Spring 2011 Copyright 2011 Bryan M. Keller All Rights Reserved IMAGING THE TWILIGHT ZONE: THE MORPHOLOGY AND DISTRIBUTION OF MESOPHOTIC ZONE FEATURES, A CASE STUDY FROM BONAIRE, DUTCH CARIBBEAN by Bryan Mark Keller Approved: _____________________________________________________ Arthur C. Trembanis, Ph.D. Professor in charge of thesis on behalf of the Advisory Committee Approved: _____________________________________________________ Charles E. Epifanio, Ph.D. Director of the School of Marine Science and Policy Approved: _____________________________________________________ Nancy M. Targett, Ph.D. Dean of the College of Earth, Ocean, and Environment Approved: _____________________________________________________ Charles G. Riordan, Ph.D. Vice Provost for Graduate and Professional Education ACKNOWLEDGMENTS I would like to thank my advisor, Dr. Art Trembanis, for his instruction and support throughout my thesis research. My gratitude is also extended to Dr. Douglas Miller and Dr. Mark Patterson for their assistance and guidance throughout the entirety of my research. Much thanks to the University of Delaware Office of Graduate and Professional Education, the Department of Oceanography, and the Department of Geology for the funding necessary for me to perform m fieldwork in Bonaire. Finally, I would like to thank my lab mates and colleagues for answering my countless questions and always being willing to provide insight about any problems that I faced. iii DEDICATION This manuscript is dedicated to Rachel Lyons who has known me through all of my struggles and always insisted that I chase my dreams. -

Chapter 6 Underwater Photography
Chapter 6 Underwater Photography It is hard to imagine a more difficult endeavor than taking pictures underwater. You have to be at least partially crazy to get involved in it, and if you are not crazy when you start, it is virtually guaranteed to make you crazy. First, you have to learn to survive in an alien environment. Before you even think about the highly specialized photographic equipment required, you have to learn how to safely breathe and move about underwater. That means you have to become a certified diver. The most important qualification required to become a good underwater photographer is to be a good diver. You can’t worry about things like f- stops, depth of field, shutter speeds, exposure, point of focus, and other technical photographic stuff if you are not comfortable underwater. Things like breath and buoyancy control, awareness of time, depth and tank air pressure, must become second nature, like shifting while driving a car with a manual transmission. Underwater photography, even with excellent diving skills, state-of-the-art equipment, and plentiful subjects, is still a very low batting average endeavor. You fail much more often than you succeed. That means that you discard a lot more images than you keep. But the occasional “keeper” can make up for all the throwaways. Underwater photography offers the highest highs, and the lowest lows of any endeavor I know. Everything in underwater photography is stacked against success. First, unlike taking pictures topside, you have a very limited amount of time to capture your image (before you have to surface or drown.) Whatever underwater subject you are seeking on each dive, you have to find it in less than an hour, you can’t hang around all day waiting for something to appear. -

Just What Did Archimedes Say About Buoyancy?
Just What Did Archimedes Say About Buoyancy? Erlend H. Graf, SUNY, Stony Brook, NY “A body immersed in a fluid is buoyed What Archimedes Really Said up with a force equal to the weight of Going back to the source,5 Archimedes’ On Float- the displaced fluid.” So goes a venerable ing Bodies, Book I contains a number of statements textbook1 statement of the hydrostatic and proofs that are relevant to the present discussion. principle that bears Archimedes’ name. Archimedes considers three cases separately, namely, Archimedes’ principle is often proved for objects with a density equal to that of the fluid, ob- the special case of a right-circular cylinder jects “lighter” (less dense) than the fluid, and objects or rectangular solid by considering the “heavier” (more dense) than the fluid. difference in hydrostatic forces between He proves the following propositions: the (flat, horizontal) upper and lower sur- faces, and then generalized by the even “Proposition 3. Of solids those which, size for size, are of equal weight with a fluid will, if let down in- more venerable “it can be shown…” that to the fluid, be immersed so that they do not pro- the principle is in fact true for bodies of ject above the surface but do not sink lower. arbitrary shape. “Proposition 4. A solid lighter than a fluid will, if im- mersed in it, not be completely submerged, but rom time to time in this journal,2,3,4 the ques- part of it will project above the surface. tion has arisen as to how to deal with an im- “Proposition 5. -

USING SONY A900 for ASTROPHOTOGRAPHY • TELESCOPE ADAPTORS - PRIME FOCUS - EYEPIECE PROJECTION
USING SONY a900 for ASTROPHOTOGRAPHY • TELESCOPE ADAPTORS - PRIME FOCUS - EYEPIECE PROJECTION • REMOTE RELEASE - SONY CABLE RELEASE RM-S1AM - SONY REMOTE COMMANDER RMT-DSLR1 - GADGET INFINITY RADIO S1 REMOTE - JJC-JR-C IR MODULAR REMOTE - HÄHNEL HW433S80 RF WiFi REMOTE - JJC TM-F LCD DIGITAL TIMER / INTERVALOMETER • DRIVE FUNCTION - MIRROR LOCK-UP • FOCUS - SCREEN L - DIOPTRE CORRECTION - RIGHT ANGLE MAGNIFIER • FINE FOCUS - RACK & PINION FOCUSER - MOTORISED FOCUS - REMOTE DIGITAL FOCUSER - DEPTH OF FOCUS • TRACKING FOCUS • SEEING • UN-DAMPED VIBRATION - ELECTROMAGNETIC SHUTTER RELEASE • CHECKING FOCUS • LAPTOP REMOTE CAPTURE & CONTROL vs LCD VIEW SCREEN • EXPOSURE - MANUAL MODE OPTION - CALCULATING EXPOSURE TIMES - ISO SETTING & RESOLUTION - ISO vs SEEING - BRACKETING vs DR-O USING SONY a900 for ASTROPHOTOGRAPHY The Sony a900 DSLR is capable of taking fine photographs of the Sun in H-alpha and white light, the Moon, and deep sky objects. It has a 35mm Fx format CMOS sensor specifically designed for low light level photography. The twin BIONZ processors are designed to produce high resolution, low noise, high dynamic range images. The 3-inch LCD view screen may enlarge raw images x19, and its resolution is sufficient to judge precise focus without having to resort to a remote laptop monitor. The optical viewfinder affords 100% frame coverage, and has internal dioptre correction and interchangeable focusing screens. • TELESCOPE ADAPTORS - PRIME FOCUS The Sony 'Exmor' CMOS sensor size is 35.9mm x 24.0mm, giving a frame diagonal 43.2mm. The throat clearance I.D. of the prime focus adaptor needs to accommodate an image circle 43.3mm diameter (allowing 0.1mm clearance) otherwise the frame corners will be mechanically vignetted. -

PRESSURE 68 Kg 136 Kg Pressure: a Normal Force Exerted by a Fluid Per Unit Area
CLASS Second Unit PRESSURE 68 kg 136 kg Pressure: A normal force exerted by a fluid per unit area 2 Afeet=300cm 0.23 kgf/cm2 0.46 kgf/cm2 P=68/300=0.23 kgf/cm2 The normal stress (or “pressure”) on the feet of a chubby person is much greater than on the feet of a slim person. Some basic pressure 2 gages. • Absolute pressure: The actual pressure at a given position. It is measured relative to absolute vacuum (i.e., absolute zero pressure). • Gage pressure: The difference between the absolute pressure and the local atmospheric pressure. Most pressure-measuring devices are calibrated to read zero in the atmosphere, and so they indicate gage pressure. • Vacuum pressures: Pressures below atmospheric pressure. Throughout this text, the pressure P will denote absolute pressure unless specified otherwise. 3 Other Pressure Measurement Devices • Bourdon tube: Consists of a hollow metal tube bent like a hook whose end is closed and connected to a dial indicator needle. • Pressure transducers: Use various techniques to convert the pressure effect to an electrical effect such as a change in voltage, resistance, or capacitance. • Pressure transducers are smaller and faster, and they can be more sensitive, reliable, and precise than their mechanical counterparts. • Strain-gage pressure transducers: Work by having a diaphragm deflect between two chambers open to the pressure inputs. • Piezoelectric transducers: Also called solid- state pressure transducers, work on the principle that an electric potential is generated in a crystalline substance when it is subjected to mechanical pressure. Various types of Bourdon tubes used to measure pressure.