AN4907: Engine Control Etpu Library – Application Note
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Harrop Camshaft Grind Specifications
Harrop Engineering Australia Pty Ltd www.harrop.com.au ABN: 87 134 196 080 Phone: +61 3 9474 - 0900 96 Bell Street, Preston, Fax: +61 3 9474 – 0999 Melbourne, VIC, 3072, Australia Email: [email protected] Harrop Camshaft Grind Specifications Harrop HO1 Camshaft 226/232 .607”/.602” @ 112 LSA Great NA camshaft Lumpy idle but acceptable driveability, Great power and torque Manual or auto standard gear ratios are ok but 3.7 or 3.9 would be preferred. Automatic may require stall converter. Could be used in boosted application but due to low LSA Would require smaller pulley to be increase boost. Harrop HO2 camshaft 224/232 .610” / .610” @ 114 LSA Great blower camshaft offering acceptably lumpy idle and great drivability, this camshaft will give great power through the mid to high RPM range. As this camshaft is more aggressive then the H05. Normally this would require a stall converter, it can be run on a standard converter but it may push on it slightly. Sound clip: https://www.youtube.com/watch?v=NvOGohRd7-k Harrop H03 Camshaft 232/233 .610” / .602” @ 112 LSA Will give great lumpy cammed affect, Low LSA would take boost out of a forced induction motor. Largest recommend camshaft for a 5.7 N/A , Acceptable in 6.0L and 6.2L square port engines, Must have 3.7 (square port) or 3.9 (LS1) for the best results in a manual car. Auto would require stall converter. 1 / 2 File: Harrop Letter Head “Commercial in Confidence” Issue:12th January 2018 designdevelop deliver Print: Friday, 25 September 2020 ` Harrop HO4 camshaft 234/238 .593” / .595” @ 114 LSA The H04 is designed with Forced induction in mind but can be used as a naturally aspirated camshaft as well. -

The Trilobe Engine Project Greensteam
The Trilobe Engine Project Greensteam Michael DeLessio 4/19/2020 – 8/31/2020 Table of Contents Introduction ................................................................................................................................................... 2 The Trilobe Engine ................................................................................................................................... 2 Computer Design Model ............................................................................................................................... 3 Research Topics and Design Challenges ...................................................................................................... 4 Two Stroke Engines .................................................................................................................................. 4 The Trilobe Cam ....................................................................................................................................... 5 The Flywheel ............................................................................................................................................ 6 Other “Tri” Cams ...................................................................................................................................... 7 The Tristar ............................................................................................................................................. 8 The Asymmetrical Trilobe ................................................................................................................... -

Understanding Overhead-Valve Engines Once Unheard of These Engines Now Supply the Power for Nearly All of Your Equipment
Understanding Overhead-Valve Engines Once unheard of these engines now supply the power for nearly all of your equipment. By ROBERT SOKOL Intertec Publishing Corp., Technical Manuals Division You've all heard about overhead valves when shopping Valve-Design Characteristics for power equipment, but what do they mean to you? Do The valves consist of a round head, a stem and a groove you need overhead valves? Do they cost more? What will at the top of the valve. The head of the valve is the larger they do for you? Twenty years ago, overhead valves were end that opens and closes the passageway to and from the unheard of in any type of power equipment. Nowadays, it combustion chamber. The stem guides the valve up and is difficult to find a small engine without them. down and supports the valve spring. The groove at the top In an engine with overhead valves, the intake and of the valve stem holds the valve spring in place with a exhaust valve(s) is located in the cylinder head, as opposed retainer lock. The valves must open and close for the air- to being mounted in the engine block. Many of the larger and-fuel mix to enter, then exit, the combustion chamber. engine manufacturers still offer "standard" engines that Proper timing of the opening and closing of the valves is have the valves in the block. Their "deluxe" engines have required for the engine to run smoothly. The camshaft con- overhead valves and stronger construction. Overhead trols valve sequence and timing. -

Poppet Valve
POPPET VALVE A poppet valve is a valve consisting of a hole, usually round or oval, and a tapered plug, usually a disk shape on the end of a shaft also called a valve stem. The shaft guides the plug portion by sliding through a valve guide. In most applications a pressure differential helps to seal the valve and in some applications also open it. Other types Presta and Schrader valves used on tires are examples of poppet valves. The Presta valve has no spring and relies on a pressure differential for opening and closing while being inflated. Uses Poppet valves are used in most piston engines to open and close the intake and exhaust ports. Poppet valves are also used in many industrial process from controlling the flow of rocket fuel to controlling the flow of milk[[1]]. The poppet valve was also used in a limited fashion in steam engines, particularly steam locomotives. Most steam locomotives used slide valves or piston valves, but these designs, although mechanically simpler and very rugged, were significantly less efficient than the poppet valve. A number of designs of locomotive poppet valve system were tried, the most popular being the Italian Caprotti valve gear[[2]], the British Caprotti valve gear[[3]] (an improvement of the Italian one), the German Lentz rotary-cam valve gear, and two American versions by Franklin, their oscillating-cam valve gear and rotary-cam valve gear. They were used with some success, but they were less ruggedly reliable than traditional valve gear and did not see widespread adoption. In internal combustion engine poppet valve The valve is usually a flat disk of metal with a long rod known as the valve stem out one end. -
Installation Instructions Cloyes® 3-Keyway Crank Sprockets
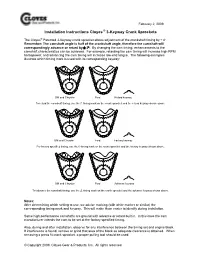
February 2, 2009 Installation Instructions Cloyes ® 3-Keyway Crank Sprockets The Cloyes® Patented 3-Keyway crank sprocket allows adjustment of the crankshaft timing by ± 4°. Remember: The camshaft angle is half of the crankshaft angle, therefore the camshaft will correspondingly advance or retard by ± 2°. By changing the cam timing, enhancements to the camshaft characteristics can be achieved. For example, retarding the cam timing will increase high RPM horsepower, and advancing the cam timing will increase low-end torque. The following examples illustrate which timing mark is used with its corresponding keyway: GM and Chrysler Ford Retard keyway To retard the camshaft timing, use the timing mark on the crank sprocket and the retard keyway shown above. GM and Chrysler Ford Factory keyway For factory specified timing, use the Ο timing mark on the crank sprocket and the factory keyway shown above. GM and Chrysler Ford Advance keyway To advance the camshaft timing, use the ∆ timing mark on the crank sprocket and the advance keyway shown above. Notes: After determining which setting to use, we advise marking (with white marker or similar) the corresponding timing mark and keyway. This will make them easier to identify during installation. Some high performance camshafts are ground with advance or retard built in. In this case the cam manufacturer intends the cam to be set at the factory specified timing. Also, during and after installation, observe for any interference between the timing set and engine block. If interference is found, remove or grind that area of the block so adequate clearance is obtained. When removing a press fit crank sprocket, a proper pulling tool should be used. -

Survey on ITS-G5 CAM Statistics CAR 2 CAR Communication Consortium
CAR 2 CAR Communication Consortium Survey on ITS-G5 CAM statistics CAR 2 CAR Communication Consortium About the C2C-CC Enhancing road safety and traffic efficiency by means of Cooperative Intelligent Transport Systems and Services (C-ITS) is the dedicated goal of the CAR 2 CAR Communication Consortium. The industrial driven, non-commercial association was founded in 2002 by vehicle manufacturers affiliated with the idea of cooperative road traffic based on Vehicle-to-Vehicle Communications (V2V) and supported by Vehicle-to-Infrastructure Communications (V2I). Today, the Consortium comprises 88 members, with 18 vehicle manufacturers, 39 equipment suppliers and 31 research organisations. Over the years, the CAR 2 CAR Communication Consortium has evolved to be one of the key players in preparing the initial deployment of C-ITS in Europe and the subsequent innovation phases. CAR 2 CAR members focus on wireless V2V communication applications based on ITS-G5 and concentrate all efforts on creating standards to ensure the interoperability of cooperative systems, spanning all vehicle classes across borders and brands. As a key contributor, the CAR 2 CAR Communication Consortium works in close cooperation with the European and international standardisation organisations such as ETSI and CEN. Disclaimer The present document has been developed within the CAR 2 CAR Communication Consortium and might be further elaborated within the CAR 2 CAR Communication Consortium. The CAR 2 CAR Communication Consortium and its members accept no liability for any use of this document and other documents from the CAR 2 CAR Communication Consortium for implementation. CAR 2 CAR Communication Consortium documents should be obtained directly from the CAR 2 CAR Communication Consortium. -

Basic Camshaft Adjustment Instructions in Order To
Basic Camshaft adjustment instructions In order to accommodate the INEX rule regarding cranking compression a camshaft timing adjustment may be necessary. By retarding the intake opening timing the static compression will stay the same while lowering the cranking compression. The first step is to check your existing compression. Warm your engine up. Pull all spark plugs, using some good anti seize screw in your compression tester. INEX uses the MAC tools CT-25 compression tester with the 12mm adaptor. Readings can vary considerably so make sure you have a quality gauge that has been well taken care of. With carbs at full throttle crank your engine 10 to 12 revolutions and read the gauge. Once you have determined your starting point remove your valve cover. The first thing you will see will be your intake and exhaust camshafts. The Intake will be the one closest to your carburetors. Slowly rotate your engine over using a 7/8” or 22 millimeter wrench until you can see a dot in the camshaft while looking down thru the hole in the number 3 cam cap. ADJ BOLT CAM HOLE INTAKE CAM Each gear will have 2 opposing slots that allow you to turn the gear on the camshaft. Loosen up the two INTAKE cam bolts using a 10MM wrench. DO NOT REMOVE, just loosen. While loose, rotate the cam towards the carburetors just a small amount (1/16”) this can usually be done by using a 7/8” or 22 MM wrench on the hex part of the cam, right next to the gear. -

SL2016-634: Ridge Wear at Crankpin Journals
Service Letter SL2016-634/JNN Action code: WHEN CONVENIENT Ridge Wear at Crankpin Journals SL2016-634/JNN November 2016 Dear Sirs Concerns This service letter contains important information about the develop- Owners and operators of ment of ridge wear at the crankshaft journal and the precautions re- MAN four-stroke diesel engines. quired in connection with the replacement of connecting rod bearings. Type: If the ridge is not addressed, this may cause severe engine damage GenSets: L16/24(S), L21/31(S), with a possible loss of property and life. L27/38(S), L23/30H/DF, L23/30S, Ridge wear will inevitably develop over time at the crank pin journal. L28/32H/DF, L28/32S, V28/32H, The wear pattern is caused by abrasive impurities that remain in the V28/32S lube oil. Efficient lube oil cleaning is therefore essential to keep the Propulsion: L21/31, L27/38, L23/30(A), development of ridge wear as low as possible in trunk engines. V23/30(A), L28/32(A), V28/32(A) If you have any questions or comments, please forward your email to [email protected] with reference to this service letter. Yours faithfully Mikael C. Jensen Jørgen Paaske Nielsen Vice President Superintendent Engineer Engineering Operation MAN Diesel & Turbo MAN Diesel & Turbo MAN Diesel & Turbo H. Christoffersensvej 6 Niels Juels Vej 15 Branch of MAN Diesel & Turbo SE, 4960 Holeby 9900 Frederikshavn Germany Denmark Denmark CVR No.: 31611792 Phone: +45 54 69 31 00 Phone: +45 96 20 41 00 Head office: Teglholmsgade 41 Fax: +45 54 69 30 30 Fax: +45 96 20 40 30 2450 Copenhagen SV, Denmark [email protected] [email protected] German Reg.No.: HRB 22056 Amtsgericht Augsburg www.mandieselturbo.com Service Letter SL2016-634/JNN Ridge wear will inevitably develop over time at the crank pin journal. -

FAST® Supercharger & Cam Power Packages for GM Gen
FAST® Supercharger & Cam Power Packages for GM Gen III/IV LS Engines Memphis, TN – An Edelbrock® Supercharger Kit and COMP Cams® Cam Kit is the perfect pairing for performance enthusiasts looking for 850+ HP potential from their GM LS engines. The ultimate solution for engine swaps and serious performance applications, FAST® has put together the first ever supercharger and valve train packages from two of the automotive aftermarket’s biggest brands – Edelbrock® and COMP Cams®. The FAST® engineering team extensively dyno tested various combinations of camshaft specs, valve springs and supercharger pulleys to optimize the power and efficiency of the Edelbrock® superchargers. Dyno testing on a stock head 6.2L LS3 engine produced over 850 HP when running with E85 fuel. The FAST® Supercharger & Cam Power Packages include a pump gas friendly supercharger pulley for engine break-in, initial tuning and general performance driving, while a smaller pulley is also included when maximum power is desired on race fuel or E85. For those wishing to further fine tune boost levels, additional pulley sizes are available. Packages include the basics required to install the supercharger, but necessary accessory items such as fuel injectors, air intakes and heat exchanger pumps are left up to the installer, providing total flexibility for custom installations. The Edelbrock® Supercharger Kits include a 2300 TVS supercharger w/ integrated intercooler. The intercooler is a high capacity, dual bar and plate design that enables major power gains through lower inlet air charge temps. Also included are COMP Cams® application specific cam kits that contain state of the art Low Shock Technology™ Camshafts designed specifically for supercharger applications, along with perfectly matched pushrods, valve springs, retainers, locks, seats and seals. -

Concept of Six Stroke Engine
JOURNAL OF ADVANCEMENT IN ENGINEERING AND TECHNOLOGY Journal homepage: http://scienceq.org/Journals/JAET.php Research Article Open Access Concept of Six Stroke Engine P.Naresh1*, A.V.Hari Babu 2 , 1,2, P Naresh , Asst professor in ME DEPT, AVR&SVR College of Engg&Tech,Nandyal. *Corresponding author: P.Naresh, E.mail : [email protected] Received: November 27, 2015, Accepted: December 18, 2015, Published: December 18, 2015 ABSTRACT One of the most difficult challenges in engine technology today is the urgent need to increase engine thermal efficiency. Higher efficiencies mean less fuel consumption and lower atmospheric emissions per unit of work produced by the engine. In 1862 a Frenchman Alphouse Beau de Rochas gives his theory regarding the ideal cycle of the internal combustion engine. This theory is applied by a German engineer named Nikolaus A. Otto, who firstly built a successful four-stroke SI engine in 1876. The four-stroke combustion cycle later became known as the "Otto cycle". In four stroke engine, the piston executes four complete strokes within the cylinder, and the crankshaft completes two revolutions for each thermodynamic cycle. The disadvantage of the four-stroke cycle is that only half as many power strokes are 2 completed per revolution of the crankshaft. The capacity of the four strokes would be 340cc only. Less torque is generated during the process. Pollution is more in four stroke engine. In six strokes the engine captures the exhausted heat from the four stroke cycle and uses it to get an additional power and exhaust stroke of the piston in the same cylinder. -

S&S® Cycle, Inc
® Instruction 51-1018 S&S Cycle, Inc. 02-18-13 14025 Cty Hwy G PO Box 215 Copyright © 1980, 1985, 1988, 1991, Viola, Wisconsin 54664 1992, 2002, 2006, 2005, 2010, 2013 Phone: 608-627-1497 • Fax: 608-627-1488 by S&S® Cycle, Inc. Technical Service Phone: 608-627-TECH (8324) Technical Service Email: [email protected] All rights reserved. Printed in the U.S.A. Website: www.sscycle.com General Instructions for All Flywheel Installations and Instructions for 37/16" - 31/2" Bore Big Twin Stroker Kit 1936–1999 DISCLAIMER: IMPORTANT NOTICE: S&S parts are designed for high performance, off road, racing applications and Statements in this instruction sheet preceded by the following words are of are intended for the very experienced rider only. The installation of S&S parts special significance. may void or adversely effect your factory warranty. In addition such installation and use may violate certain federal, state, and local laws, rules and ordinances WARNING as well as other laws when used on motor vehicles used on public highways, Means there is the possibility of injury to yourself or others. especially in states where pollution laws may apply. Always check federal, state, CAUTION and local laws before modifying your motorcycle. It is the sole and exclusive responsibility of the user to determine the suitability of the product for his or Means there is the possibility of damage to the part or motorcycle. her use, and the user shall assume all legal, personal injury risk and liability and NOTE all other obligations, duties, and risks associated therewith. -

Aug. 13, 1968 A. S. Baxter ETAL 3,396,819 LUBRICATION of CONNECTING ROD BIG-END BEARINGS Filed Nov
Aug. 13, 1968 A. S. Baxter ETAL 3,396,819 LUBRICATION OF CONNECTING ROD BIG-END BEARINGS Filed Nov. 1, 1965 3,396,819 United States Patent Office Patented Aug. 13, 1968 1. 2 Squeeze-film lubrication conditions. Since the squeeze-film 3,396,819 LUBRICATION OF CONNECTING ROD is relatively thick, minor imperfections in the mating BG-END BEARNGS surfaces can be tolerated because they do not rupture the Allan S. Baxter, Joseph F. Warriner, and Peter M. Jeffery, oil film and therefore the mating surfaces do not touch. Lincoln, England, assignors to Ruston & Hornsby The following description relates to the accompanying Limited, Lincoln, England, a company of Great Britain drawings, showing, by way of example only, one embodi Filed Nov. 1, 1965, Ser. No. 505,885 ment of the invention. In the drawings: Claims priority, application Great Britain, Nov. 7, 1964, FIGURE 1 is a partly sectioned elevation of a fork-and 45,484/64 blade connecting-rod arrangement for a V-form internal 6 Claims. (C. 184-6) combustion engine, showing means for lubrication for the O blade-rod big-end bearing according to the invention; and FIGURE 2 is a composite section on lines A-A and ABSTRACT OF THE DISCLOSURE A-B of FIGURE 1. In the lubrication of undirectionally loaded bearings The invention is shown in the drawings as applied to between the crank pin of a reciprocating piston engine 5 an engine having pairs of cylinders, the two cylinders of and the large end of a connecting rod, a cam and follower each pair being arranged in V formation, so that the mechanism between relatively oscillating parts relieves the centre-line of what may be called the left-hand cylinder in bearing load to allow entry of lubricant.