Introduction to Analytical Methods for Internal Combustion Engine Cam Mechanisms a Typical finger Follower Cam Mechanism for a High Performance Engine J
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Harrop Camshaft Grind Specifications
Harrop Engineering Australia Pty Ltd www.harrop.com.au ABN: 87 134 196 080 Phone: +61 3 9474 - 0900 96 Bell Street, Preston, Fax: +61 3 9474 – 0999 Melbourne, VIC, 3072, Australia Email: [email protected] Harrop Camshaft Grind Specifications Harrop HO1 Camshaft 226/232 .607”/.602” @ 112 LSA Great NA camshaft Lumpy idle but acceptable driveability, Great power and torque Manual or auto standard gear ratios are ok but 3.7 or 3.9 would be preferred. Automatic may require stall converter. Could be used in boosted application but due to low LSA Would require smaller pulley to be increase boost. Harrop HO2 camshaft 224/232 .610” / .610” @ 114 LSA Great blower camshaft offering acceptably lumpy idle and great drivability, this camshaft will give great power through the mid to high RPM range. As this camshaft is more aggressive then the H05. Normally this would require a stall converter, it can be run on a standard converter but it may push on it slightly. Sound clip: https://www.youtube.com/watch?v=NvOGohRd7-k Harrop H03 Camshaft 232/233 .610” / .602” @ 112 LSA Will give great lumpy cammed affect, Low LSA would take boost out of a forced induction motor. Largest recommend camshaft for a 5.7 N/A , Acceptable in 6.0L and 6.2L square port engines, Must have 3.7 (square port) or 3.9 (LS1) for the best results in a manual car. Auto would require stall converter. 1 / 2 File: Harrop Letter Head “Commercial in Confidence” Issue:12th January 2018 designdevelop deliver Print: Friday, 25 September 2020 ` Harrop HO4 camshaft 234/238 .593” / .595” @ 114 LSA The H04 is designed with Forced induction in mind but can be used as a naturally aspirated camshaft as well. -

The Trilobe Engine Project Greensteam
The Trilobe Engine Project Greensteam Michael DeLessio 4/19/2020 – 8/31/2020 Table of Contents Introduction ................................................................................................................................................... 2 The Trilobe Engine ................................................................................................................................... 2 Computer Design Model ............................................................................................................................... 3 Research Topics and Design Challenges ...................................................................................................... 4 Two Stroke Engines .................................................................................................................................. 4 The Trilobe Cam ....................................................................................................................................... 5 The Flywheel ............................................................................................................................................ 6 Other “Tri” Cams ...................................................................................................................................... 7 The Tristar ............................................................................................................................................. 8 The Asymmetrical Trilobe ................................................................................................................... -

Understanding Overhead-Valve Engines Once Unheard of These Engines Now Supply the Power for Nearly All of Your Equipment
Understanding Overhead-Valve Engines Once unheard of these engines now supply the power for nearly all of your equipment. By ROBERT SOKOL Intertec Publishing Corp., Technical Manuals Division You've all heard about overhead valves when shopping Valve-Design Characteristics for power equipment, but what do they mean to you? Do The valves consist of a round head, a stem and a groove you need overhead valves? Do they cost more? What will at the top of the valve. The head of the valve is the larger they do for you? Twenty years ago, overhead valves were end that opens and closes the passageway to and from the unheard of in any type of power equipment. Nowadays, it combustion chamber. The stem guides the valve up and is difficult to find a small engine without them. down and supports the valve spring. The groove at the top In an engine with overhead valves, the intake and of the valve stem holds the valve spring in place with a exhaust valve(s) is located in the cylinder head, as opposed retainer lock. The valves must open and close for the air- to being mounted in the engine block. Many of the larger and-fuel mix to enter, then exit, the combustion chamber. engine manufacturers still offer "standard" engines that Proper timing of the opening and closing of the valves is have the valves in the block. Their "deluxe" engines have required for the engine to run smoothly. The camshaft con- overhead valves and stronger construction. Overhead trols valve sequence and timing. -

Poppet Valve
POPPET VALVE A poppet valve is a valve consisting of a hole, usually round or oval, and a tapered plug, usually a disk shape on the end of a shaft also called a valve stem. The shaft guides the plug portion by sliding through a valve guide. In most applications a pressure differential helps to seal the valve and in some applications also open it. Other types Presta and Schrader valves used on tires are examples of poppet valves. The Presta valve has no spring and relies on a pressure differential for opening and closing while being inflated. Uses Poppet valves are used in most piston engines to open and close the intake and exhaust ports. Poppet valves are also used in many industrial process from controlling the flow of rocket fuel to controlling the flow of milk[[1]]. The poppet valve was also used in a limited fashion in steam engines, particularly steam locomotives. Most steam locomotives used slide valves or piston valves, but these designs, although mechanically simpler and very rugged, were significantly less efficient than the poppet valve. A number of designs of locomotive poppet valve system were tried, the most popular being the Italian Caprotti valve gear[[2]], the British Caprotti valve gear[[3]] (an improvement of the Italian one), the German Lentz rotary-cam valve gear, and two American versions by Franklin, their oscillating-cam valve gear and rotary-cam valve gear. They were used with some success, but they were less ruggedly reliable than traditional valve gear and did not see widespread adoption. In internal combustion engine poppet valve The valve is usually a flat disk of metal with a long rod known as the valve stem out one end. -

Lawn-Boy V-Engine Service Manual
LAWN-BOY V-ENGINE SERVICE MANUAL Table of Contents – Page 1 of 2 REFERENCE SECTION SAFETY SPECIFICATIONS - ENGINE SPECIFICATIONS SPECIFICATIONS - ENGINE FASTENER TORQUE REQUIREMENTS SPECIFICATIONS - CARBURETOR SPECIFICATIONS (WALBRO LMR-16) SPECIAL TOOL REQUIREMENTS TROUBLESHOOTING MAINTENANCE SECTION 1 WALBRO LMR-16 CARBURETOR LMR-16 CARBURETOR - IDENTIFICATION LMR-16 CARBURETOR - THEORY OF OPERATION LMR-16 CARBURETOR - GOVERNOR THEORY LMR-16 CARBURETOR - REMOVAL LMR-16 CARBURETOR - DISASSEMBLY LMR-16 CARBURETOR - CLEANING AND INSPECTION LMR-16 CARBURETOR - ASSEMBLY LMR-16 CARBURETOR - PRESETTING THE GOVERNOR LMR-16 CARBURETOR - ASSEMBLING AIR BOX TO CARBURETOR LMR-16 CARBURETOR - INSTALLATION LMR-16 CARBURETOR - FINAL CHECK LMR-16 CARBURETOR - CHOKE ADJUSTMENT LMR-16 CARBURETOR - SERVICING THE AIR FILTER LMR-16 CARBURETOR-TROUBLESHOOTING SECTION 2 PRIMER START CARBURETOR PRIMER START CARBURETOR - IDENTIFICATION PRIMER START CARBURETOR - THEORY OF OPERATION PRIMER START CARBURETOR - GOVERNOR THEORY PRIMER START CARBURETOR - REMOVAL PRIMER START CARBURETOR - DISASSEMBLY PRIMER START CARBURETOR - CLEANING AND INSPECTION PRIMER START CARBURETOR - ASSEMBLY PRIMER START CARBURETOR - INSTALLATION PRIMER START CARBURETOR - PRESETTING THE GOVERNOR PRIMER START CARBURETOR - FINAL CHECK PRIMER START CARBURETOR - SERVICING THE AIR FILTER PRIMER START CARBURETOR TROUBLESHOOTING ENGINE STARTS HARD ENGINE RUNS RICH ENGINE RUNS LEAN FUEL LEAKS FROM CARBURETOR LAWN-BOY V-ENGINE SERVICE MANUAL Table of Contents – Page 2 of 2 SECTION 3 FUEL SYSTEM FUEL -

Wärtsilä 32 PRODUCT GUIDE © Copyright by WÄRTSILÄ FINLAND OY
Wärtsilä 32 PRODUCT GUIDE © Copyright by WÄRTSILÄ FINLAND OY COPYRIGHT © 2021 by WÄRTSILÄ FINLAND OY All rights reserved. No part of this booklet may be reproduced or copied in any form or by any means (electronic, mechanical, graphic, photocopying, recording, taping or other information retrieval systems) without the prior written permission of the copyright owner. THIS PUBLICATION IS DESIGNED TO PROVIDE AN ACCURATE AND AUTHORITATIVE INFORMATION WITH REGARD TO THE SUBJECT-MATTER COVERED AS WAS AVAILABLE AT THE TIME OF PRINTING. HOWEVER, THE PUBLICATION DEALS WITH COMPLICATED TECHNICAL MATTERS SUITED ONLY FOR SPECIALISTS IN THE AREA, AND THE DESIGN OF THE SUBJECT-PRODUCTS IS SUBJECT TO REGULAR IMPROVEMENTS, MODIFICATIONS AND CHANGES. CONSEQUENTLY, THE PUBLISHER AND COPYRIGHT OWNER OF THIS PUBLICATION CAN NOT ACCEPT ANY RESPONSIBILITY OR LIABILITY FOR ANY EVENTUAL ERRORS OR OMISSIONS IN THIS BOOKLET OR FOR DISCREPANCIES ARISING FROM THE FEATURES OF ANY ACTUAL ITEM IN THE RESPECTIVE PRODUCT BEING DIFFERENT FROM THOSE SHOWN IN THIS PUBLICATION. THE PUBLISHER AND COPYRIGHT OWNER SHALL UNDER NO CIRCUMSTANCES BE HELD LIABLE FOR ANY FINANCIAL CONSEQUENTIAL DAMAGES OR OTHER LOSS, OR ANY OTHER DAMAGE OR INJURY, SUFFERED BY ANY PARTY MAKING USE OF THIS PUBLICATION OR THE INFORMATION CONTAINED HEREIN. Wärtsilä 32 Product Guide Introduction Introduction This Product Guide provides data and system proposals for the early design phase of marine engine installations. For contracted projects specific instructions for planning the installation are always delivered. Any data and information herein is subject to revision without notice. This 1/2021 issue replaces all previous issues of the Wärtsilä 32 Project Guides. Issue Published Updates 1/2021 15.03.2021 Technical data updated. -
Installation Instructions Cloyes® 3-Keyway Crank Sprockets
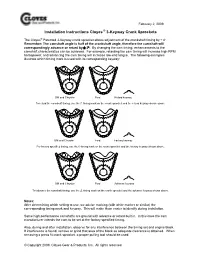
February 2, 2009 Installation Instructions Cloyes ® 3-Keyway Crank Sprockets The Cloyes® Patented 3-Keyway crank sprocket allows adjustment of the crankshaft timing by ± 4°. Remember: The camshaft angle is half of the crankshaft angle, therefore the camshaft will correspondingly advance or retard by ± 2°. By changing the cam timing, enhancements to the camshaft characteristics can be achieved. For example, retarding the cam timing will increase high RPM horsepower, and advancing the cam timing will increase low-end torque. The following examples illustrate which timing mark is used with its corresponding keyway: GM and Chrysler Ford Retard keyway To retard the camshaft timing, use the timing mark on the crank sprocket and the retard keyway shown above. GM and Chrysler Ford Factory keyway For factory specified timing, use the Ο timing mark on the crank sprocket and the factory keyway shown above. GM and Chrysler Ford Advance keyway To advance the camshaft timing, use the ∆ timing mark on the crank sprocket and the advance keyway shown above. Notes: After determining which setting to use, we advise marking (with white marker or similar) the corresponding timing mark and keyway. This will make them easier to identify during installation. Some high performance camshafts are ground with advance or retard built in. In this case the cam manufacturer intends the cam to be set at the factory specified timing. Also, during and after installation, observe for any interference between the timing set and engine block. If interference is found, remove or grind that area of the block so adequate clearance is obtained. When removing a press fit crank sprocket, a proper pulling tool should be used. -

Survey on ITS-G5 CAM Statistics CAR 2 CAR Communication Consortium
CAR 2 CAR Communication Consortium Survey on ITS-G5 CAM statistics CAR 2 CAR Communication Consortium About the C2C-CC Enhancing road safety and traffic efficiency by means of Cooperative Intelligent Transport Systems and Services (C-ITS) is the dedicated goal of the CAR 2 CAR Communication Consortium. The industrial driven, non-commercial association was founded in 2002 by vehicle manufacturers affiliated with the idea of cooperative road traffic based on Vehicle-to-Vehicle Communications (V2V) and supported by Vehicle-to-Infrastructure Communications (V2I). Today, the Consortium comprises 88 members, with 18 vehicle manufacturers, 39 equipment suppliers and 31 research organisations. Over the years, the CAR 2 CAR Communication Consortium has evolved to be one of the key players in preparing the initial deployment of C-ITS in Europe and the subsequent innovation phases. CAR 2 CAR members focus on wireless V2V communication applications based on ITS-G5 and concentrate all efforts on creating standards to ensure the interoperability of cooperative systems, spanning all vehicle classes across borders and brands. As a key contributor, the CAR 2 CAR Communication Consortium works in close cooperation with the European and international standardisation organisations such as ETSI and CEN. Disclaimer The present document has been developed within the CAR 2 CAR Communication Consortium and might be further elaborated within the CAR 2 CAR Communication Consortium. The CAR 2 CAR Communication Consortium and its members accept no liability for any use of this document and other documents from the CAR 2 CAR Communication Consortium for implementation. CAR 2 CAR Communication Consortium documents should be obtained directly from the CAR 2 CAR Communication Consortium. -

Wo 2009/086051 A2
(12) INTERNATIONAL APPLICATION PUBLISHED UNDER THE PATENT COOPERATION TREATY (PCT) (19) World Intellectual Property Organization International Bureau (43) International Publication Date (10) International Publication Number 9 July 2009 (09.07.2009) PCT WO 2009/086051 A2 (51) International Patent Classification: (74) Agent: MCGUIRE, Katherine, H.; Woods Oviatt F25B 1/04 (2006.01) Gilman LLP, 700 Crossroads Building, 2 State Street, Rochester, NY 14614 (US). (21) International Application Number: PCT/US2008/087591 (81) Designated States (unless otherwise indicated, for every kind of national protection available): AE, AG, AL, AM, (22) International Filing Date: AO, AT,AU, AZ, BA, BB, BG, BH, BR, BW, BY, BZ, CA, 19 December 2008 (19.12.2008) CH, CN, CO, CR, CU, CZ, DE, DK, DM, DO, DZ, EC, EE, EG, ES, FI, GB, GD, GE, GH, GM, GT, HN, HR, HU, ID, (25) Filing Language: English IL, IN, IS, JP, KE, KG, KM, KN, KP, KR, KZ, LA, LC, LK, (26) Publication Language: English LR, LS, LT, LU, LY,MA, MD, ME, MG, MK, MN, MW, MX, MY,MZ, NA, NG, NI, NO, NZ, OM, PG, PH, PL, PT, (30) Priority Data: RO, RS, RU, SC, SD, SE, SG, SK, SL, SM, ST, SV, SY,TJ, 61/016,131 21 December 2007 (21.12.2007) US TM, TN, TR, TT, TZ, UA, UG, US, UZ, VC, VN, ZA, ZM, ZW (71) Applicant (for all designated States except US): CAR- LETON LIFE SUPPORT SYSTEMS INC. [US/US]; (84) Designated States (unless otherwise indicated, for every 2734 Hickory Grove Road, Davenport, IA 52808 (US). kind of regional protection available): ARIPO (BW, GH, GM, KE, LS, MW, MZ, NA, SD, SL, SZ, TZ, UG, ZM, (72) Inventors; and ZW), Eurasian (AM, AZ, BY, KG, KZ, MD, RU, TJ, TM), (75) Inventors/Applicants (for US only): RALEIGH, Tim¬ European (AT,BE, BG, CH, CY, CZ, DE, DK, EE, ES, FI, othy [US/US]; 26810 172nd Ave, Long Grove, IA FR, GB, GR, HR, HU, IE, IS, IT, LT,LU, LV,MC, MT, NL, 52756 (US). -

Basic Camshaft Adjustment Instructions in Order To
Basic Camshaft adjustment instructions In order to accommodate the INEX rule regarding cranking compression a camshaft timing adjustment may be necessary. By retarding the intake opening timing the static compression will stay the same while lowering the cranking compression. The first step is to check your existing compression. Warm your engine up. Pull all spark plugs, using some good anti seize screw in your compression tester. INEX uses the MAC tools CT-25 compression tester with the 12mm adaptor. Readings can vary considerably so make sure you have a quality gauge that has been well taken care of. With carbs at full throttle crank your engine 10 to 12 revolutions and read the gauge. Once you have determined your starting point remove your valve cover. The first thing you will see will be your intake and exhaust camshafts. The Intake will be the one closest to your carburetors. Slowly rotate your engine over using a 7/8” or 22 millimeter wrench until you can see a dot in the camshaft while looking down thru the hole in the number 3 cam cap. ADJ BOLT CAM HOLE INTAKE CAM Each gear will have 2 opposing slots that allow you to turn the gear on the camshaft. Loosen up the two INTAKE cam bolts using a 10MM wrench. DO NOT REMOVE, just loosen. While loose, rotate the cam towards the carburetors just a small amount (1/16”) this can usually be done by using a 7/8” or 22 MM wrench on the hex part of the cam, right next to the gear. -

HSDI Diesel Engines - Gas Exchange Optimization and the Impact on Reducing Emission
HSDI Diesel Engines - Gas Exchange Optimization and the Impact on Reducing Emission ABSTRACT All future powertrain developments must consider the primary tasks of achieving the required emission levels and CO2- values, while still providing comfort, good drivability, high reliability and affordable costs. One method for improving fuel economy in passenger vehicles that is beginning to be examined is the incorporation of downsizing. To achieve the levels of engine performance that will be required, increasing the boost pressure and/or rated speed is mandatory. When the boost pressure or the rated speed is increased, the result is an increase in the mass flow rate through the intake and exhaust ports and valves. Considering the impact of these changes, the port layout of the system has to be reanalyzed. The primary purpose of this study is to examine these effects on the port layout on a modern diesel combustion system and to present a promising concept. The study included flow measurements, PIV measurements of intake flow, CFD simulations of the flow field during intake and results from the thermodynamic test bench. One of the key aspects that needed to be examined was to demonstrate flow quality’s impact on combustion. A new port concept was developed as a result of this study that utilizes a variable valve lift to provide a highly variable swirl. This design enables a homogenous flow field in the cylinder, with excellent flow coefficient. The design also allows an increase in volumetric efficiency combined with a reduction in flow losses. INTRODUCTION The prerequisites for advanced concepts of High Speed Direct Injection (HSDI) Diesel Engines require that due to the rapidly increasing price of crude oil they must improve fuel economy and the heat-trapping ability of carbon dioxide emissions. -

Needle Roller Bearings Needle Roller Bearings 4703 E Cover 01-12-03 09.16 Sida 4
4703_E_Cover 01-12-03 09.16 Sida 2 R Needle roller bearings roller Needle Needle roller bearings 4703_E_Cover 01-12-03 09.16 Sida 4 © Copyright SKF 2001 The contents of this catalogue are the copyright of the publisher and may not be reproduced (even extracts) unless permis-sion is granted. Every care has been taken to ensure the accuracy of the information con- tained in this catalogue but no liability can be accepted for any loss or damage whet- her direct, indirect or consequential arising out of the use of the information contained here in. Catalogue 4703/I E Printed in Sweden on environmentally friendly paper by Elanders Graphic Systems AB. General ……………………………………………………………………………… 3 Foreword ……………………………………………………………………………………… 5 1 The SKF Group – a worldwide corporation ……………………………………………… 6 Bearing data …………………………………………………………………… 9 Bearing types ………………………………………………………………………………… 10 2 Bearing data – general ……………………………………………………………………… 14 Speeds ……………………………………………………………………………………… 14 Tolerances ………………………………………………………………………………… 14 Internal clearance ………………………………………………………………………… 21 Materials …………………………………………………………………………………… 22 Supplementary designations …………………………………………………………… 24 Design of associated components ……………………………………………………… 26 Product data …………………………………………………………………… 31 Needle roller and cage assemblies ……………………………………………………… 33 3 Drawn cup needle roller bearings ………………………………………………………… 49 Needle roller bearings ……………………………………………………………………… 67 Alignment needle roller bearings ………………………………………………………… 107 Needle roller thrust bearings ………………………………………………………………