Instruction Formats (Zero, One, Two and Three Address Instruction)
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Computer Organization and Architecture Designing for Performance Ninth Edition
COMPUTER ORGANIZATION AND ARCHITECTURE DESIGNING FOR PERFORMANCE NINTH EDITION William Stallings Boston Columbus Indianapolis New York San Francisco Upper Saddle River Amsterdam Cape Town Dubai London Madrid Milan Munich Paris Montréal Toronto Delhi Mexico City São Paulo Sydney Hong Kong Seoul Singapore Taipei Tokyo Editorial Director: Marcia Horton Designer: Bruce Kenselaar Executive Editor: Tracy Dunkelberger Manager, Visual Research: Karen Sanatar Associate Editor: Carole Snyder Manager, Rights and Permissions: Mike Joyce Director of Marketing: Patrice Jones Text Permission Coordinator: Jen Roach Marketing Manager: Yez Alayan Cover Art: Charles Bowman/Robert Harding Marketing Coordinator: Kathryn Ferranti Lead Media Project Manager: Daniel Sandin Marketing Assistant: Emma Snider Full-Service Project Management: Shiny Rajesh/ Director of Production: Vince O’Brien Integra Software Services Pvt. Ltd. Managing Editor: Jeff Holcomb Composition: Integra Software Services Pvt. Ltd. Production Project Manager: Kayla Smith-Tarbox Printer/Binder: Edward Brothers Production Editor: Pat Brown Cover Printer: Lehigh-Phoenix Color/Hagerstown Manufacturing Buyer: Pat Brown Text Font: Times Ten-Roman Creative Director: Jayne Conte Credits: Figure 2.14: reprinted with permission from The Computer Language Company, Inc. Figure 17.10: Buyya, Rajkumar, High-Performance Cluster Computing: Architectures and Systems, Vol I, 1st edition, ©1999. Reprinted and Electronically reproduced by permission of Pearson Education, Inc. Upper Saddle River, New Jersey, Figure 17.11: Reprinted with permission from Ethernet Alliance. Credits and acknowledgments borrowed from other sources and reproduced, with permission, in this textbook appear on the appropriate page within text. Copyright © 2013, 2010, 2006 by Pearson Education, Inc., publishing as Prentice Hall. All rights reserved. Manufactured in the United States of America. -
Soft Machines Targets Ipcbottleneck
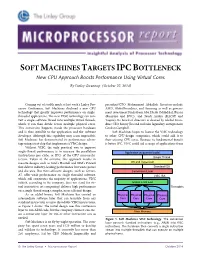
SOFT MACHINES TARGETS IPC BOTTLENECK New CPU Approach Boosts Performance Using Virtual Cores By Linley Gwennap (October 27, 2014) ................................................................................................................... Coming out of stealth mode at last week’s Linley Pro- president/CTO Mohammad Abdallah. Investors include cessor Conference, Soft Machines disclosed a new CPU AMD, GlobalFoundries, and Samsung as well as govern- technology that greatly improves performance on single- ment investment funds from Abu Dhabi (Mubdala), Russia threaded applications. The new VISC technology can con- (Rusnano and RVC), and Saudi Arabia (KACST and vert a single software thread into multiple virtual threads, Taqnia). Its board of directors is chaired by Global Foun- which it can then divide across multiple physical cores. dries CEO Sanjay Jha and includes legendary entrepreneur This conversion happens inside the processor hardware Gordon Campbell. and is thus invisible to the application and the software Soft Machines hopes to license the VISC technology developer. Although this capability may seem impossible, to other CPU-design companies, which could add it to Soft Machines has demonstrated its performance advan- their existing CPU cores. Because its fundamental benefit tage using a test chip that implements a VISC design. is better IPC, VISC could aid a range of applications from Without VISC, the only practical way to improve single-thread performance is to increase the parallelism Application (sequential code) (instructions per cycle, or IPC) of the CPU microarchi- Single Thread tecture. Taken to the extreme, this approach results in massive designs such as Intel’s Haswell and IBM’s Power8 OS and Hypervisor that deliver industry-leading performance but waste power Standard ISA and die area. -

Instruction Register MAR = Memory Address Register MBR = Memory Buffer Register I/O AR = I/O Address Register I/O BR = I/O Buffer Register
Hardware Level Organization Intro MIPS 1 CPU Main Memory Major components: 0 PC MAR - memory System IR MBR Bus - central processing unit Instruction I/O AR Instruction - registers Instruction Ex Unit I/O BR - the fetch/execute cycle (the hardware process ) Data I/O Module Data Data n-1 buffers PC = program counter IR = instruction register MAR = memory address register MBR = memory buffer register I/O AR = I/O address register I/O BR = I/O buffer register CS @VT Computer Organization II ©2005-2013 McQuain Central Processing Unit Intro MIPS 2 Control - decodes instructions and manages CPU’s internal resources Registers - general-purpose registers available to user processes - special-purpose registers directly managed in fetch/execute cycle - other registers may be reserved for use of operating system - very fast and expensive (relative to memory) - hold all operands and results of arithmetic instructions (on RISC systems) - save bits in instruction representation Data path or arithmetic/logic unit (ALU) - operates on data CS @VT Computer Organization II ©2005-2013 McQuain Stored Program Concept Intro MIPS 3 Instructions are collections of bits Programs are stored in memory, to be read or written just like data Main Memory CPU 0 memory for data, programs, PC MAR compilers, editors, etc. Instruction IR MBR Instruction I/O AR Instruction Ex Unit I/O BR Data Data Data n-1 Fetch & Execute Cycle Instructions are fetched and put into a special register Bits in the register "control" the subsequent actions Fetch the “next” instruction and continue CS @VT Computer Organization II ©2005-2013 McQuain Stored Program Concept Intro MIPS 4 Of course, on most systems several programs will be stored in memory at any given time. -
Please Replace the Following Pages in the Book. 26 Microcontroller Theory and Applications with the PIC18F
Please replace the following pages in the book. 26 Microcontroller Theory and Applications with the PIC18F Before Push After Push Stack Stack 16-bit Register 0120 143E 20C2 16-bit Register 0120 SP 20CA SP 20C8 143E 20C2 0703 20C4 0703 20C4 F601 20C6 F601 20C6 0706 20C8 0706 20C8 0120 20CA 20CA 20CC 20CC 20CE 20CE Bottom of Stack FIGURE 2.12 PUSH operation when accessing a stack from the bottom Before POP After POP Stack 16-bit Register A286 16-bit Register 0360 Stack 143E 20C2 SP 20C8 SP 20CA 143E 20C2 0705 20C4 0705 20C4 F208 20C6 F208 20C6 0107 20C8 0107 20C8 A286 20CA A286 20CA 20CC 20CC Bottom of Stack FIGURE 2.13 POP operation when accessing a stack from the bottom Note that the stack is a LIFO (last in, first out) memory. As mentioned earlier, a stack is typically used during subroutine CALLs. The CPU automatically PUSHes the return address onto a stack after executing a subroutine CALL instruction in the main program. After executing a RETURN from a subroutine instruction (placed by the programmer as the last instruction of the subroutine), the CPU automatically POPs the return address from the stack (previously PUSHed) and then returns control to the main program. Note that the PIC18F accesses the stack from the top. This means that the stack pointer in the PIC18F holds the address of the bottom of the stack. Hence, in the PIC18F, the stack pointer is incremented after a PUSH, and decremented after a POP. 2.3.2 Control Unit The main purpose of the control unit is to read and decode instructions from the program memory. -

Intel® 4 Series Chipset Family Datasheet
Intel® 4 Series Chipset Family Datasheet For the Intel® 82Q45, 82Q43, 82B43, 82G45, 82G43, 82G41 Graphics and Memory Controller Hub (GMCH) and the Intel® 82P45, 82P43 Memory Controller Hub (MCH) March 2010 Document Number: 319970-007 INFORMATION IN THIS DOCUMENT IS PROVIDED IN CONNECTION WITH INTEL® PRODUCTS. NO LICENSE, EXPRESS OR IMPLIED, BY ESTOPPEL OR OTHERWISE, TO ANY INTELLECTUAL PROPERTY RIGHTS IS GRANTED BY THIS DOCUMENT. EXCEPT AS PROVIDED IN INTEL'S TERMS AND CONDITIONS OF SALE FOR SUCH PRODUCTS, INTEL ASSUMES NO LIABILITY WHATSOEVER, AND INTEL DISCLAIMS ANY EXPRESS OR IMPLIED WARRANTY, RELATING TO SALE AND/OR USE OF INTEL PRODUCTS INCLUDING LIABILITY OR WARRANTIES RELATING TO FITNESS FOR A PARTICULAR PURPOSE, MERCHANTABILITY, OR INFRINGEMENT OF ANY PATENT, COPYRIGHT OR OTHER INTELLECTUAL PROPERTY RIGHT. Intel products are not intended for use in medical, life saving, life sustaining, critical control or safety systems, or in nuclear facility applications. Intel may make changes to specifications and product descriptions at any time, without notice. Designers must not rely on the absence or characteristics of any features or instructions marked "reserved" or "undefined." Intel reserves these for future definition and shall have no responsibility whatsoever for conflicts or incompatibilities arising from future changes to them. The Intel® 4 Series Chipset family may contain design defects or errors known as errata, which may cause the product to deviate from published specifications. Current characterized errata are available on request. Contact your local Intel sales office or your distributor to obtain the latest specifications and before placing your product order. I2C is a two-wire communications bus/protocol developed by Philips. -

Computer Architecture Out-Of-Order Execution
Computer Architecture Out-of-order Execution By Yoav Etsion With acknowledgement to Dan Tsafrir, Avi Mendelson, Lihu Rappoport, and Adi Yoaz 1 Computer Architecture 2013– Out-of-Order Execution The need for speed: Superscalar • Remember our goal: minimize CPU Time CPU Time = duration of clock cycle × CPI × IC • So far we have learned that in order to Minimize clock cycle ⇒ add more pipe stages Minimize CPI ⇒ utilize pipeline Minimize IC ⇒ change/improve the architecture • Why not make the pipeline deeper and deeper? Beyond some point, adding more pipe stages doesn’t help, because Control/data hazards increase, and become costlier • (Recall that in a pipelined CPU, CPI=1 only w/o hazards) • So what can we do next? Reduce the CPI by utilizing ILP (instruction level parallelism) We will need to duplicate HW for this purpose… 2 Computer Architecture 2013– Out-of-Order Execution A simple superscalar CPU • Duplicates the pipeline to accommodate ILP (IPC > 1) ILP=instruction-level parallelism • Note that duplicating HW in just one pipe stage doesn’t help e.g., when having 2 ALUs, the bottleneck moves to other stages IF ID EXE MEM WB • Conclusion: Getting IPC > 1 requires to fetch/decode/exe/retire >1 instruction per clock: IF ID EXE MEM WB 3 Computer Architecture 2013– Out-of-Order Execution Example: Pentium Processor • Pentium fetches & decodes 2 instructions per cycle • Before register file read, decide on pairing Can the two instructions be executed in parallel? (yes/no) u-pipe IF ID v-pipe • Pairing decision is based… On data -

Performance of a Computer (Chapter 4) Vishwani D
ELEC 5200-001/6200-001 Computer Architecture and Design Fall 2013 Performance of a Computer (Chapter 4) Vishwani D. Agrawal & Victor P. Nelson epartment of Electrical and Computer Engineering Auburn University, Auburn, AL 36849 ELEC 5200-001/6200-001 Performance Fall 2013 . Lecture 1 What is Performance? Response time: the time between the start and completion of a task. Throughput: the total amount of work done in a given time. Some performance measures: MIPS (million instructions per second). MFLOPS (million floating point operations per second), also GFLOPS, TFLOPS (1012), etc. SPEC (System Performance Evaluation Corporation) benchmarks. LINPACK benchmarks, floating point computing, used for supercomputers. Synthetic benchmarks. ELEC 5200-001/6200-001 Performance Fall 2013 . Lecture 2 Small and Large Numbers Small Large 10-3 milli m 103 kilo k 10-6 micro μ 106 mega M 10-9 nano n 109 giga G 10-12 pico p 1012 tera T 10-15 femto f 1015 peta P 10-18 atto 1018 exa 10-21 zepto 1021 zetta 10-24 yocto 1024 yotta ELEC 5200-001/6200-001 Performance Fall 2013 . Lecture 3 Computer Memory Size Number bits bytes 210 1,024 K Kb KB 220 1,048,576 M Mb MB 230 1,073,741,824 G Gb GB 240 1,099,511,627,776 T Tb TB ELEC 5200-001/6200-001 Performance Fall 2013 . Lecture 4 Units for Measuring Performance Time in seconds (s), microseconds (μs), nanoseconds (ns), or picoseconds (ps). Clock cycle Period of the hardware clock Example: one clock cycle means 1 nanosecond for a 1GHz clock frequency (or 1GHz clock rate) CPU time = (CPU clock cycles)/(clock rate) Cycles per instruction (CPI): average number of clock cycles used to execute a computer instruction. -

Chap01: Computer Abstractions and Technology
CHAPTER 1 Computer Abstractions and Technology 1.1 Introduction 3 1.2 Eight Great Ideas in Computer Architecture 11 1.3 Below Your Program 13 1.4 Under the Covers 16 1.5 Technologies for Building Processors and Memory 24 1.6 Performance 28 1.7 The Power Wall 40 1.8 The Sea Change: The Switch from Uniprocessors to Multiprocessors 43 1.9 Real Stuff: Benchmarking the Intel Core i7 46 1.10 Fallacies and Pitfalls 49 1.11 Concluding Remarks 52 1.12 Historical Perspective and Further Reading 54 1.13 Exercises 54 CMPS290 Class Notes (Chap01) Page 1 / 24 by Kuo-pao Yang 1.1 Introduction 3 Modern computer technology requires professionals of every computing specialty to understand both hardware and software. Classes of Computing Applications and Their Characteristics Personal computers o A computer designed for use by an individual, usually incorporating a graphics display, a keyboard, and a mouse. o Personal computers emphasize delivery of good performance to single users at low cost and usually execute third-party software. o This class of computing drove the evolution of many computing technologies, which is only about 35 years old! Server computers o A computer used for running larger programs for multiple users, often simultaneously, and typically accessed only via a network. o Servers are built from the same basic technology as desktop computers, but provide for greater computing, storage, and input/output capacity. Supercomputers o A class of computers with the highest performance and cost o Supercomputers consist of tens of thousands of processors and many terabytes of memory, and cost tens to hundreds of millions of dollars. -

The Central Processor Unit
Systems Architecture The Central Processing Unit The Central Processing Unit – p. 1/11 The Computer System Application High-level Language Operating System Assembly Language Machine level Microprogram Digital logic Hardware / Software Interface The Central Processing Unit – p. 2/11 CPU Structure External Memory MAR: Memory MBR: Memory Address Register Buffer Register Address Incrementer R15 / PC R11 R7 R3 R14 / LR R10 R6 R2 R13 / SP R9 R5 R1 R12 R8 R4 R0 User Registers Booth’s Multiplier Barrel IR Shifter Control Unit CPSR 32-Bit ALU The Central Processing Unit – p. 3/11 CPU Registers Internal Registers Condition Flags PC Program Counter C Carry IR Instruction Register Z Zero MAR Memory Address Register N Negative MBR Memory Buffer Register V Overflow CPSR Current Processor Status Register Internal Devices User Registers ALU Arithmetic Logic Unit Rn Register n CU Control Unit n = 0 . 15 M Memory Store SP Stack Pointer MMU Mem Management Unit LR Link Register Note that each CPU has a different set of User Registers The Central Processing Unit – p. 4/11 Current Process Status Register • Holds a number of status flags: N True if result of last operation is Negative Z True if result of last operation was Zero or equal C True if an unsigned borrow (Carry over) occurred Value of last bit shifted V True if a signed borrow (oVerflow) occurred • Current execution mode: User Normal “user” program execution mode System Privileged operating system tasks Some operations can only be preformed in a System mode The Central Processing Unit – p. 5/11 Register Transfer Language NAME Value of register or unit ← Transfer of data MAR ← PC x: Guard, only if x true hcci: MAR ← PC (field) Specific field of unit ALU(C) ← 1 (name), bit (n) or range (n:m) R0 ← MBR(0:7) Rn User Register n R0 ← MBR num Decimal number R0 ← 128 2_num Binary number R1 ← 2_0100 0001 0xnum Hexadecimal number R2 ← 0x40 M(addr) Memory Access (addr) MBR ← M(MAR) IR(field) Specified field of IR CU ← IR(op-code) ALU(field) Specified field of the ALU(C) ← 1 Arithmetic and Logic Unit The Central Processing Unit – p. -

Register Are Used to Quickly Accept, Store, and Transfer Data And
Register are used to quickly accept, store, and transfer data and instructions that are being used immediately by the CPU, there are various types of Registers those are used for various purpose. Among of the some Mostly used Registers named as AC or Accumulator, Data Register or DR, the AR or Address Register, program counter (PC), Memory Data Register (MDR) ,Index register,Memory Buffer Register. These Registers are used for performing the various Operations. While we are working on the System then these Registers are used by the CPU for Performing the Operations. When We Gives Some Input to the System then the Input will be Stored into the Registers and When the System will gives us the Results after Processing then the Result will also be from the Registers. So that they are used by the CPU for Processing the Data which is given by the User. Registers Perform:- 1) Fetch: The Fetch Operation is used for taking the instructions those are given by the user and the Instructions those are stored into the Main Memory will be fetch by using Registers. 2) Decode: The Decode Operation is used for interpreting the Instructions means the Instructions are decoded means the CPU will find out which Operation is to be performed on the Instructions. 3) Execute: The Execute Operation is performed by the CPU. And Results those are produced by the CPU are then Stored into the Memory and after that they are displayed on the user Screen. Types of Registers are as Followings 1. MAR stand for Memory Address Register This register holds the memory addresses of data and instructions. -
Computer Organization
Chapter 12 Computer Organization Central Processing Unit (CPU) • Data section ‣ Receives data from and sends data to the main memory subsystem and I/O devices • Control section ‣ Issues the control signals to the data section and the other components of the computer system Figure 12.1 CPU Input Data Control Main Output device section section Memory device Bus Data flow Control CPU components • 16-bit memory address register (MAR) ‣ 8-bit MARA and 8-bit MARB • 8-bit memory data register (MDR) • 8-bit multiplexers ‣ AMux, CMux, MDRMux ‣ 0 on control line routes left input ‣ 1 on control line routes right input Control signals • Originate from the control section on the right (not shown in Figure 12.2) • Two kinds of control signals ‣ Clock signals end in “Ck” to load data into registers with a clock pulse ‣ Signals that do not end in “Ck” to set up the data flow before each clock pulse arrives 0 1 8 14 15 22 23 A IR T3 M1 0x00 0x01 2 3 9 10 16 17 24 25 LoadCk Figure 12.2 X T4 M2 0x02 0x03 4 5 11 18 19 26 27 5 C SP T1 T5 M3 0x04 0x08 5 6 7 12 13 20 21 28 29 B PC T2 T6 M4 0xFA 0xFC 5 30 31 A CPU registers M5 0xFE 0xFF CBus ABus BBus Bus MARB MARCk MARA MDRCk MDR MDRMux AMux AMux MDRMux CMux 4 ALU ALU CMux Cin Cout C CCk Mem V VCk ANDZ Addr ANDZ Z ZCk Zout 0 Data 0 0 0 N NCk MemWrite MemRead Figure 12.2 (Expanded) 0 1 8 14 15 22 23 A IR T3 M1 0x00 0x01 2 3 9 10 16 17 24 25 LoadCk X T4 M2 0x02 0x03 4 5 11 18 19 26 27 5 C SP T1 T5 M3 0x04 0x08 5 6 7 12 13 20 21 28 29 B PC T2 T6 M4 0xFA 0xFC 5 30 31 A CPU registers M5 0xFE 0xFF CBus ABus BBus -
Computer Organization and Architecture, Rajaram & Radhakrishan, PHI
CHAPTER I CONTENTS: 1.1 INTRODUCTION 1.2 STORED PROGRAM ORGANIZATION 1.3 INDIRECT ADDRESS 1.4 COMPUTER REGISTERS 1.5 COMMON BUS SYSTEM SUMMARY SELF ASSESSMENT OBJECTIVE: In this chapter we are concerned with basic architecture and the different operations related to explain the proper functioning of the computer. Also how we can specify the operations with the help of different instructions. CHAPTER II CONTENTS: 2.1 REGISTER TRANSFER LANGUAGE 2.2 REGISTER TRANSFER 2.3 BUS AND MEMORY TRANSFERS 2.4 ARITHMETIC MICRO OPERATIONS 2.5 LOGIC MICROOPERATIONS 2.6 SHIFT MICRO OPERATIONS SUMMARY SELF ASSESSMENT OBJECTIVE: Here the concept of digital hardware modules is discussed. Size and complexity of the system can be varied as per the requirement of today. The interconnection of various modules is explained in the text. The way by which data is transferred from one register to another is called micro operation. Different micro operations are explained in the chapter. CHAPTER III CONTENTS: 3.1 INTRODUCTION 3.2 TIMING AND CONTROL 3.3 INSTRUCTION CYCLE 3.4 MEMORY-REFERENCE INSTRUCTIONS 3.5 INPUT-OUTPUT AND INTERRUPT SUMMARY SELF ASSESSMENT OBJECTIVE: There are various instructions with the help of which we can transfer the data from one place to another and manipulate the data as per our requirement. In this chapter we have included all the instructions, how they are being identified by the computer, what are their formats and many more details regarding the instructions. CHAPTER IV CONTENTS: 4.1 INTRODUCTION 4.2 ADDRESS SEQUENCING 4.3 MICROPROGRAM EXAMPLE 4.4 DESIGN OF CONTROL UNIT SUMMARY SELF ASSESSMENT OBJECTIVE: Various examples of micro programs are discussed in this chapter.