Aspects of Inlet Geometry and Dynamics
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Dynamic Behaviour of Hydraulic Structures, Part B
Dynamic behaviour of hydraulic structures Part B Structures in waves P.A. Kolkman T.H.G. Jongeling Delft Hydraulics The three manuscripts (parts A, B and C) were put in book form by Rijkswaterstaat in Dutch in a limited edition and distributed within Rijkswaterstaat and Delft Hydraulics. Dutch title of that edition is: Dynamisch gedrag van Waterbouwkundige Constructies. Ten years after this Dutch version Delft Hydraulics decided to translate the books into English thus making these available for English speaking colleagues as well. Because of in the text often referred is to Delft Hydraulic reports made for clients (so with restrictions for others to look at) we decided to limit the circulation of the English version as well. However, the books are of value also without perusal of these reports. The task was carried out by Mr. R.J. de Jong of Delft Hydraulics. Translation services were provided by Veritaal (www.veritaal.nl). Delft Hydraulics 2007 Delft Hydraulics Table of contents Part B List of symbols Part B 1 INTRODUCTION..............................................................................................................1 2 WAVES..............................................................................................................................3 2.1 Wave phenomena......................................................................................................3 2.2 Wind-generated waves .............................................................................................5 2.2.1 Wave characteristics...........................................................................................5 -
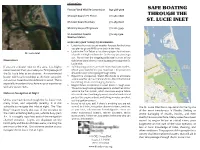
Safe Boating Through the St. Lucie Inlet
Information: Florida Fish & Wildlife Commission 850-488-4676 SAFE BOATING US Coast Guard - Ft. Pierce 772-461-7606 THROUGH THE ST. LUCIE INLET US Coast Guard Auxiliary 772-465-8128 US Army Corps of Engineers 772-221-3349 St. Lucie Inlet Coastal 772-225-2300 Weather Station HERE ARE SOME THINGS TO REMEMBER: • Listen to the most recent weather forecast for the times you plan to go out AND come back in the inlet. • Look in the Tide Tables or local newspapers for the times St. Lucie Inlet of predicted high and low tides for the day you plan to go out. Remember the outgoing (ebb) tital current at low Newcomers tide is the worst time to make a passage through the St. Lucie Inlet. If you are a boater new to this area, it is highly • Safe boating practices are even more important in inlets. recommended that you make your first passage of Check your boat before you head out. Life preservers the St. Lucie Inlet as an observer. An experienced should be worn when going through inlets. boater with local knowledge at the helm can point • Expect the unexpected. Watch the clouds to anticipate out various hazards and conditions to avoid. This is severe weather such as thunderstorms. Be on the lookout for shifting shoals and changing channels. especially important if you have no prior experience • Engine failure is common in small boats in rough seas. with any ocean inlets. The extra roughness agitates gasoline and settled dirt or water in the fuel system, which can cause engine failure Notes on Navigation at Night at a crtical time. -

USER MANUAL SWASH Version 7.01
SWASH USER MANUAL SWASH version 7.01 SWASH USER MANUAL by : TheSWASHteam mail address : Delft University of Technology Faculty of Civil Engineering and Geosciences Environmental Fluid Mechanics Section P.O. Box 5048 2600 GA Delft The Netherlands website : http://www.tudelft.nl/swash Copyright (c) 2010-2020 Delft University of Technology. Permission is granted to copy, distribute and/or modify this document under the terms of the GNU Free Documentation License, Version 1.2 or any later version published by the Free Software Foundation; with no Invariant Sections, no Front-Cover Texts, and no Back- Cover Texts. A copy of the license is available at http://www.gnu.org/licenses/fdl.html#TOC1. iv Contents 1 About this manual 1 2 Generaldescriptionandinstructionsforuse 3 2.1 Introduction................................... 3 2.2 Background,featuresandapplications . ...... 3 2.2.1 Objectiveandcontext ......................... 3 2.2.2 Abird’s-eyeviewofSWASH. 4 2.2.3 ModelfeaturesandvalidityofSWASH . 7 2.2.4 Relation to Boussinesq-type wave models . .... 8 2.2.5 Relation to circulation and coastal flow models. ...... 9 2.3 Internal scenarios, shortcomings and coding bugs . ......... 9 2.4 Unitsandcoordinatesystems . 10 2.5 Choiceofgridsandtimewindows . .. 11 2.5.1 Introduction............................... 11 2.5.2 Computationalgridandtimewindow . 12 2.5.3 Inputgrid(s)andtimewindow(s) . 13 2.5.4 Input grid(s) for transport of constituents . ...... 14 2.5.5 Outputgrids .............................. 15 2.6 Boundaryconditions .............................. 16 2.7 Timeanddatenotation ............................ 17 2.8 Troubleshooting................................. 17 3 Input and output files 19 3.1 General ..................................... 19 3.2 Input/outputfacilities . .. 19 3.3 Printfileanderrormessages . .. 20 4 Description of commands 21 4.1 Listofavailablecommands. -
1 the Influence of Groyne Fields and Other Hard Defences on the Shoreline Configuration
1 The Influence of Groyne Fields and Other Hard Defences on the Shoreline Configuration 2 of Soft Cliff Coastlines 3 4 Sally Brown1*, Max Barton1, Robert J Nicholls1 5 6 1. Faculty of Engineering and the Environment, University of Southampton, 7 University Road, Highfield, Southampton, UK. S017 1BJ. 8 9 * Sally Brown ([email protected], Telephone: +44(0)2380 594796). 10 11 Abstract: Building defences, such as groynes, on eroding soft cliff coastlines alters the 12 sediment budget, changing the shoreline configuration adjacent to defences. On the 13 down-drift side, the coastline is set-back. This is often believed to be caused by increased 14 erosion via the ‘terminal groyne effect’, resulting in rapid land loss. This paper examines 15 whether the terminal groyne effect always occurs down-drift post defence construction 16 (i.e. whether or not the retreat rate increases down-drift) through case study analysis. 17 18 Nine cases were analysed at Holderness and Christchurch Bay, England. Seven out of 19 nine sites experienced an increase in down-drift retreat rates. For the two remaining sites, 20 retreat rates remained constant after construction, probably as a sediment deficit already 21 existed prior to construction or as sediment movement was restricted further down-drift. 22 For these two sites, a set-back still evolved, leading to the erroneous perception that a 23 terminal groyne effect had developed. Additionally, seven of the nine sites developed a 24 set back up-drift of the initial groyne, leading to the defended sections of coast acting as 1 25 a hard headland, inhabiting long-shore drift. -

OCEANS ´09 IEEE Bremen
11-14 May Bremen Germany Final Program OCEANS ´09 IEEE Bremen Balancing technology with future needs May 11th – 14th 2009 in Bremen, Germany Contents Welcome from the General Chair 2 Welcome 3 Useful Adresses & Phone Numbers 4 Conference Information 6 Social Events 9 Tourism Information 10 Plenary Session 12 Tutorials 15 Technical Program 24 Student Poster Program 54 Exhibitor Booth List 57 Exhibitor Profiles 63 Exhibit Floor Plan 94 Congress Center Bremen 96 OCEANS ´09 IEEE Bremen 1 Welcome from the General Chair WELCOME FROM THE GENERAL CHAIR In the Earth system the ocean plays an important role through its intensive interactions with the atmosphere, cryo- sphere, lithosphere, and biosphere. Energy and material are continually exchanged at the interfaces between water and air, ice, rocks, and sediments. In addition to the physical and chemical processes, biological processes play a significant role. Vast areas of the ocean remain unexplored. Investigation of the surface ocean is carried out by satellites. All other observations and measurements have to be carried out in-situ using research vessels and spe- cial instruments. Ocean observation requires the use of special technologies such as remotely operated vehicles (ROVs), autonomous underwater vehicles (AUVs), towed camera systems etc. Seismic methods provide the foundation for mapping the bottom topography and sedimentary structures. We cordially welcome you to the international OCEANS ’09 conference and exhibition, to the world’s leading conference and exhibition in ocean science, engineering, technology and management. OCEANS conferences have become one of the largest professional meetings and expositions devoted to ocean sciences, technology, policy, engineering and education. -

A Nonlinear Relationship Between Marsh Size and Sediment Trapping Capacity Compromises Salt Marshes’ Stability Carmine Donatelli1*, Xiaohe Zhang2*, Neil K
https://doi.org/10.1130/G47131.1 Manuscript received 22 October 2019 Revised manuscript received 9 March 2020 Manuscript accepted 26 April 2020 © 2020 The Authors. Gold Open Access: This paper is published under the terms of the CC-BY license. Published online 10 June 2020 A nonlinear relationship between marsh size and sediment trapping capacity compromises salt marshes’ stability Carmine Donatelli1*, Xiaohe Zhang2*, Neil K. Ganju3, Alfredo L. Aretxabaleta3, Sergio Fagherazzi2† and Nicoletta Leonardi1† 1 Department of Geography and Planning, School of Environmental Sciences, Faculty of Science and Engineering, University of Liverpool, Roxby Building, Chatham Street, Liverpool L69 7ZT, UK 2 Department of Earth Sciences, Boston University, 675 Commonwealth Avenue, Boston, Massachusetts 02215, USA 3 Woods Hole Coastal and Marine Science Center, U.S. Geological Survey, Woods Hole, Massachusetts 02543, USA ABSTRACT tidal flats to keep pace with sea-level rise (Mari- Global assessments predict the impact of sea-level rise on salt marshes with present-day otti and Fagherazzi, 2010). levels of sediment supply from rivers and the coastal ocean. However, these assessments do Regional effects are crucial when evaluating not consider that variations in marsh extent and the related reconfiguration of intertidal area coastal interventions under the management of affect local sediment dynamics, ultimately controlling the fate of the marshes themselves. multiple agencies. Though many studies have We conducted a meta-analysis of six bays along the United States East Coast to show that focused on local marsh dynamics, less atten- a reduction in the current salt marsh area decreases the sediment availability in estuarine tion has been paid to how changes in marsh systems through changes in regional-scale hydrodynamics. -
Waves: Part 2 I
Waves: Part 2 I. Types of Waves A. Deep-Water Waves and Shallow-Water Waves Deep-water waves are waves that move in water deeper than one-half their wavelength. B. When deep-water waves begin to interact with the ocean floor, the waves are called shallow- water waves. I. Types of Waves, continued C. Shore Currents When waves crash on the beach head-on, the water they moved through flows back to the ocean underneath new incoming waves. D. This movement of water forms a subsurface current that pulls objects out to sea and is called an undertow. I. Types of Waves, continued E. Longshore Currents are water currents that travel near and parallel to the shore line. F. Longshore currents form when waves hit the shore at an angle. G. Longshore currents transport most of the sediment in beach environments I. Types of Waves, continued H. Open-Ocean Waves Sometimes waves called whitecaps and swells form in the open ocean. I. White, foaming waves with very steep crests that break in the open ocean before the waves get close to the shore are called whitecaps. J. Rolling waves that move steadily across the ocean are called swells. I. Types of Waves, continued K. Tsunamis are waves that form when a large volume of ocean water is suddenly moved up or down. This movement can be caused by underwater earthquakes, as shown below. Destructive Forces Video I. Types of Waves, continued L. Storm Surges are local rises in sea level near the shore that are caused by strong winds from a storm. -

Street Names - in Alphabetical Order
Street Names - In Alphabetical Order District / MC-ID NO. Street Name Location County Area Aalto Place Sumter - Unit 692 (Villa San Antonio) 1 Sumter County Abaco Path Sumter - Unit 197 9 Sumter County Abana Path Sumter - Unit 206 9 Sumter County Abasco Court Sumter - Unit 821 (Mangrove Villas) 8 Sumter County Abbeville Loop Sumter - Unit 80 5 Sumter County Abbey Way Sumter - Unit 164 8 Sumter County Abdella Way Sumter - Unit 180 9 Sumter County Abdella Way Sumter - Unit 181 9 Sumter County Abel Place Sumter - Unit 195 10 Sumter County Aber Lane Sumter - Unit 967 (Ventura Villas) 10 Sumter County SE 84TH Abercorn Court Marion - Unit 45 4 Marion County Abercrombie Way Sumter - Unit 98 5 Sumter County Aberdeen Run Sumter - Unit 139 7 Sumter County Abernethy Place Sumter - Unit 99 5 Sumter County Abner Street Sumter - Unit 130 6 Sumter County Abney Avenue VOF - Unit 8 12 Sumter County Abordale Lane Sumter - Unit 158 8 Sumter County Acorn Court Sumter - Unit 146 7 Sumter County Acosta Court Sumter - Unit 601 (Villa De Leon) 2 Sumter County Adair Lane Sumter - Unit 818 (Jacaranda Villas) 8 Sumter County Adams Lane Sumter - Unit 105 6 Sumter County Adamsville Avenue VOF - Unit 13 12 Sumter County Addison Avenue Sumter - Unit 37 3 Sumter County Adeline Way Sumter - Unit 713 (Hillcrest Villas) 7 Sumter County Adelphi Avenue Sumter - Unit 151 8 Sumter County Adler Court Sumter - Unit 134 7 Sumter County Adriana Way Sumter - Unit 711 (Adriana Villas) 7 Sumter County Adrienne Way Sumter - Unit 176 9 Sumter County Adrienne Way Sumter - Unit 949 (Megan -

Recent Developments of Exploration and Detection of Shallow-Water Hydrothermal Systems
sustainability Article Recent Developments of Exploration and Detection of Shallow-Water Hydrothermal Systems Zhujun Zhang 1, Wei Fan 1, Weicheng Bao 1, Chen-Tung A Chen 2, Shuo Liu 1,3 and Yong Cai 3,* 1 Ocean College, Zhejiang University, Zhoushan 316000, China; [email protected] (Z.Z.); [email protected] (W.F.); [email protected] (W.B.); [email protected] (S.L.) 2 Institute of Marine Geology and Chemistry, National Sun Yat-Sen University, Kaohsiung 804, Taiwan; [email protected] 3 Ocean Research Center of Zhoushan, Zhejiang University, Zhoushan 316000, China * Correspondence: [email protected] Received: 21 August 2020; Accepted: 29 October 2020; Published: 2 November 2020 Abstract: A hydrothermal vent system is one of the most unique marine environments on Earth. The cycling hydrothermal fluid hosts favorable conditions for unique life forms and novel mineralization mechanisms, which have attracted the interests of researchers in fields of biological, chemical and geological studies. Shallow-water hydrothermal vents located in coastal areas are suitable for hydrothermal studies due to their close relationship with human activities. This paper presents a summary of the developments in exploration and detection methods for shallow-water hydrothermal systems. Mapping and measuring approaches of vents, together with newly developed equipment, including sensors, measuring systems and water samplers, are included. These techniques provide scientists with improved accuracy, efficiency or even extended data types while studying shallow-water hydrothermal systems. Further development of these techniques may provide new potential for hydrothermal studies and relevant studies in fields of geology, origins of life and astrobiology. -

Investigation of a Simplified Open Boundary Condition for Coastal And
Investigation of a simplified open boundary condition for coastal and shelf sea hydrodynamic models by Patrick Eminet Shabangu Thesis presented in partial fulfilment of the requirements for the degree of Master of Science in Applied Mathematics in the Faculty of Science at Stellenbosch University Department of Mathematical Sciences, Applied Mathematics Division, Stellenbosch University, Private Bag X1, Matieland 7602, South Africa. Supervisors: Prof. G.J.F. Smit Dr. G.P.J. Diedericks Mr. R. C. Van Ballegooyen March 2015 Stellenbosch University https://scholar.sun.ac.za Declaration By submitting this thesis electronically, I declare that the entirety of the work contained therein is my own, original work, that I am the sole author thereof (save to the extent explicitly otherwise stated), that reproduction and pub- lication thereof by Stellenbosch University will not infringe any third party rights and that I have not previously in its entirety or in part submitted it for obtaining any qualification. Signature: . Patrick Eminet Shabangu 24 February 2015 Date: . Copyright © 2015 Stellenbosch University All rights reserved. i Stellenbosch University https://scholar.sun.ac.za Abstract In general, coastal and shelf hydrodynamic modelling is undertaken with lim- ited area numerical models such as Delft3D or Mike 21. To conduct successful numerical simulations these programmes require appropriate boundary condi- tions. Various options exist to obtain boundary conditions such as Neumann conditions, specifying water levels, specifying velocities and combination of these, amongst others. In this study one specific method is investigated, namely the specification of water levels on all the open boundaries using a "reduced physics" approach. This method may be more appropriate than Neumann conditions when the domain is fairly large and is also of particular interest as it allows measured data to be incorporated in the boundary condi- tions, although the latter was not considered in this study. -

Rocky Intertidal, Mudflats and Beaches, and Eelgrass Beds
Appendix 5.4, Page 1 Appendix 5.4 Marine and Coastline Habitats Featured Species-associated Intertidal Habitats: Rocky Intertidal, Mudflats and Beaches, and Eelgrass Beds A swath of intertidal habitat occurs wherever the ocean meets the shore. At 44,000 miles, Alaska’s shoreline is more than double the shoreline for the entire Lower 48 states (ACMP 2005). This extensive shoreline creates an impressive abundance and diversity of habitats. Five physical factors predominantly control the distribution and abundance of biota in the intertidal zone: wave energy, bottom type (substrate), tidal exposure, temperature, and most important, salinity (Dethier and Schoch 2000; Ricketts and Calvin 1968). The distribution of many commercially important fishes and crustaceans with particular salinity regimes has led to the description of “salinity zones,” which can be used as a basis for mapping these resources (Bulger et al. 1993; Christensen et al. 1997). A new methodology called SCALE (Shoreline Classification and Landscape Extrapolation) has the ability to separate the roles of sediment type, salinity, wave action, and other factors controlling estuarine community distribution and abundance. This section of Alaska’s CWCS focuses on 3 main types of intertidal habitat: rocky intertidal, mudflats and beaches, and eelgrass beds. Tidal marshes, which are also intertidal habitats, are discussed in the Wetlands section, Appendix 5.3, of the CWCS. Rocky intertidal habitats can be categorized into 3 main types: (1) exposed, rocky shores composed of steeply dipping, vertical bedrock that experience high-to- moderate wave energy; (2) exposed, wave-cut platforms consisting of wave-cut or low-lying bedrock that experience high-to-moderate wave energy; and (3) sheltered, rocky shores composed of vertical rock walls, bedrock outcrops, wide rock platforms, and boulder-strewn ledges and usually found along sheltered bays or along the inside of bays and coves. -

Wind-Wave Interaction Effects on Offshore Wind Energy Al Sam
Wind-wave interaction effects on offshore wind energy Al Sam, Ali 2016 Document Version: Publisher's PDF, also known as Version of record Link to publication Citation for published version (APA): Al Sam, A. (2016). Wind-wave interaction effects on offshore wind energy. Department of Energy Sciences, Lund University. Total number of authors: 1 Creative Commons License: Unspecified General rights Unless other specific re-use rights are stated the following general rights apply: Copyright and moral rights for the publications made accessible in the public portal are retained by the authors and/or other copyright owners and it is a condition of accessing publications that users recognise and abide by the legal requirements associated with these rights. • Users may download and print one copy of any publication from the public portal for the purpose of private study or research. • You may not further distribute the material or use it for any profit-making activity or commercial gain • You may freely distribute the URL identifying the publication in the public portal Read more about Creative commons licenses: https://creativecommons.org/licenses/ Take down policy If you believe that this document breaches copyright please contact us providing details, and we will remove access to the work immediately and investigate your claim. LUND UNIVERSITY PO Box 117 221 00 Lund +46 46-222 00 00 Wind-wave interaction effects on offshore wind energy Ali Al Sam DOCTORAL DISSERTATION by due permission of the Faculty of Engineering, Lund University, Sweden. To be defended on November 4th, 2016 at 10:15 Faculty opponent Associate Professor Stefan Ivanell Department of Earth Sciences, Uppsala University, Sweden 2016-10-04 Wind-wave interaction effects on offshore wind energy Ali Al Sam Department of Energy Sciences Faculty of Engineering Thesis for the degree of Doctor of Philosophy in Engineering.