USER MANUAL SWASH Version 7.01
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
A Field Experiment on a Nourished Beach
CHAPTER 157 A Field Experiment on a Nourished Beach A.J. Fernandez* G. Gomez Pina * G. Cuena* J.L. Ramirez* Abstract The performance of a beach nourishment at" Playa de Castilla" (Huel- va, Spain) is evaluated by means of accurate beach profile surveys, vi- sual breaking wave information, buoy-measured wave data and sediment samples. The shoreline recession at the nourished beach due to "profile equilibration" and "spreading out" losses is discussed. The modified equi- librium profile curve proposed by Larson (1991) is shown to accurately describe the profiles with a grain size varying across-shore. The "spread- ing out" losses measured at " Playa de Castilla" are found to be less than predicted by spreading out formulations. The utilization of borrowed material substantially coarser than the native material is suggested as an explanation. 1 INTRODUCTION Fernandez et al. (1990) presented a case study of a sand bypass project at "Playa de Castilla" (Huelva, Spain) and the corresponding monitoring project, that was going to be undertaken. The Beach Nourishment Monitoring Project at the "Playa de Castilla" was begun over two years ago. The project is being *Direcci6n General de Costas. M.O.P.T, Madrid (Spain) 2043 2044 COASTAL ENGINEERING 1992 carried out to evaluate the performance of a beach fill and to establish effective strategies of coastal management and represents one of the most comprehensive monitoring projects that has been undertaken in Spain. This paper summa- rizes and discusses the data set for wave climate, beach profiles and sediment samples. 2 STUDY SITE & MONITORING PROGRAM Playa de Castilla, Fig. 1, is a sandy beach located on the South-West coast of Spain between the Guadiana and Gualdalquivir rivers. -

Afgbaskerville (The Type Face)
gfaBaskerville (the type face) xagfi {the type} {the man} abcdefghijklmn opqrstuvwxyz ABCDEFGHI JKLMNOPQR STUVWXYZ Having been an early admirer of the beauty of letters, I vertical stress relatively low contrast “became insensibly desirous of contributing to the perfection Baskerville is a transitional type of them. I formed to myself ideas of greater accuracy than had yet appeared, and had endeavoured to produce a set of types according to what I conceived to be their true { old style type modern type proportion. oblique stress vertical stress —John Baskerville, preface to Milton, 1758 relatively low contrast high contrast (Anatomy of a Typeface) ” {looks} use of orthogonal lines use of orthogonal + curvy lines FHTt BDp use of curvy lines use of diagonal lines cOQ vwXZ In order to truely appreciate the quialities of Baskerville, one must understand the The Baskerville type is known for the crisp edges, high contrast and generous process of its creation. Being a printer, John Baskerville paid close attention to the proportions. Baskerville is categorized as a transitional typeface in between classical technology, creating his own intense black ink. He boiled fine linseed oil to a certain typefaces and the high contrast modern faces. density, dissolved rosin, and let it subside for months before using it. He also studied and invested in presses, resulting in the development of high standards for presses altogether. {anatomy} crossbar serif ear head serif ascender counter apex A a x g Q b q O spur x-height descender swash {characteristics} {1}g Q {2} A {3} {4}J {5}C {6}E {7}ea {1} tail on lower case g does not close {2} swash-like tail of Q {4} J well below baseline {3} high crossbar and pointed apex of A {5} top and bottom serifs on C {6} long lower arm of E {7} small counter of italic e compared to italic a {comparison} Bembo Baskerville Bembo Baskerville d The head serif of Baskerville is generally more horizontal than that of Bembo. -

Copyrighted Material
INDEX A Bertsch, Fred, 16 Caslon Italic, 86 accents, 224 Best, Mark, 87 Caslon Openface, 68 Adobe Bickham Script Pro, 30, 208 Betz, Jennifer, 292 Cassandre, A. M., 87 Adobe Caslon Pro, 40 Bézier curve, 281 Cassidy, Brian, 268, 279 Adobe InDesign soft ware, 116, 128, 130, 163, Bible, 6–7 casual scripts typeface design, 44 168, 173, 175, 182, 188, 190, 195, 218 Bickham Script Pro, 43 cave drawing, type development, 3–4 Adobe Minion Pro, 195 Bilardello, Robin, 122 Caxton, 110 Adobe Systems, 20, 29 Binner Gothic, 92 centered type alignment Adobe Text Composer, 173 Birch, 95 formatting, 114–15, 116 Adobe Wood Type Ornaments, 229 bitmapped (screen) fonts, 28–29 horizontal alignment, 168–69 AIDS awareness, 79 Black, Kathleen, 233 Century, 189 Akuin, Vincent, 157 black letter typeface design, 45 Chan, Derek, 132 Alexander Isley, Inc., 138 Black Sabbath, 96 Chantry, Art, 84, 121, 140, 148 Alfon, 71 Blake, Marty, 90, 92, 95, 140, 204 character, glyph compared, 49 alignment block type project, 62–63 character parts, typeface design, 38–39 fi ne-tuning, 167–71 Blok Design, 141 character relationships, kerning, spacing formatting, 114–23 Bodoni, 95, 99 considerations, 187–89 alternate characters, refi nement, 208 Bodoni, Giambattista, 14, 15 Charlemagne, 206 American Type Founders (ATF), 16 boldface, hierarchy and emphasis technique, China, type development, 5 Amnesty International, 246 143 Cholla typeface family, 122 A N D, 150, 225 boustrophedon, Greek alphabet, 5 circle P (sound recording copyright And Atelier, 139 bowl symbol), 223 angled brackets, -

Dynamic Behaviour of Hydraulic Structures, Part B
Dynamic behaviour of hydraulic structures Part B Structures in waves P.A. Kolkman T.H.G. Jongeling Delft Hydraulics The three manuscripts (parts A, B and C) were put in book form by Rijkswaterstaat in Dutch in a limited edition and distributed within Rijkswaterstaat and Delft Hydraulics. Dutch title of that edition is: Dynamisch gedrag van Waterbouwkundige Constructies. Ten years after this Dutch version Delft Hydraulics decided to translate the books into English thus making these available for English speaking colleagues as well. Because of in the text often referred is to Delft Hydraulic reports made for clients (so with restrictions for others to look at) we decided to limit the circulation of the English version as well. However, the books are of value also without perusal of these reports. The task was carried out by Mr. R.J. de Jong of Delft Hydraulics. Translation services were provided by Veritaal (www.veritaal.nl). Delft Hydraulics 2007 Delft Hydraulics Table of contents Part B List of symbols Part B 1 INTRODUCTION..............................................................................................................1 2 WAVES..............................................................................................................................3 2.1 Wave phenomena......................................................................................................3 2.2 Wind-generated waves .............................................................................................5 2.2.1 Wave characteristics...........................................................................................5 -

Package 'Systemfonts'
Package ‘systemfonts’ May 11, 2021 Type Package Title System Native Font Finding Version 1.0.2 Maintainer Thomas Lin Pedersen <[email protected]> Description Provides system native access to the font catalogue. As font handling varies between systems it is difficult to correctly locate installed fonts across different operating systems. The 'systemfonts' package provides bindings to the native libraries on Windows, macOS and Linux for finding font files that can then be used further by e.g. graphic devices. The main use is intended to be from compiled code but 'systemfonts' also provides access from R. License MIT + file LICENSE Encoding UTF-8 RoxygenNote 7.1.1 Depends R (>= 3.2.0) SystemRequirements c(``C++11'', ``\{}n fontconfig'', ``\{}n freetype2''), C++11 Suggests testthat (>= 2.1.0), covr, knitr, rmarkdown, tools VignetteBuilder knitr URL https://github.com/r-lib/systemfonts BugReports https://github.com/r-lib/systemfonts/issues LinkingTo cpp11 (>= 0.2.1) NeedsCompilation yes Author Thomas Lin Pedersen [aut, cre] (<https://orcid.org/0000-0002-5147-4711>), Jeroen Ooms [aut] (<https://orcid.org/0000-0002-4035-0289>), Devon Govett [aut] (Author of font-manager), RStudio [cph] Repository CRAN Date/Publication 2021-05-11 12:10:05 UTC 1 2 font_fallback R topics documented: font_fallback . .2 font_feature . .3 font_info . .5 glyph_info . .6 match_font . .7 register_font . .8 register_variant . .9 reset_font_cache . 11 shape_string . 11 string_metrics_dev . 14 string_width . 15 string_widths_dev . 16 str_split_emoji . 17 system_fonts . 18 Index 19 font_fallback Get the fallback font for a given string Description A fallback font is a font to use as a substitute if the chosen font does not contain the requested characters. -

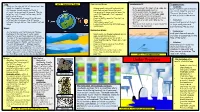
Coastal Landform Processes 29/03/2018 Do Now Copy Below: When Waves Lose Energy Material Is Deposited
Coastal Landform Processes 29/03/2018 Do Now Copy below: When waves lose energy material is deposited. This typical happens in sheltered areas such as bays, this explains why beaches are found here. Wave refraction is where the energy of the wave is reduced Aim ▪ To understand process acting on the coast that lead to landforms Wave energy converges on the headlands Wave energy is diverged Wave energy converges on the headlands Sediment moves and is deposited http://www.bbc.co.uk/education/cli ps/zsmb4wx Erosion Destructive waves will erode the coastline in four different ways: 1. Hydraulic Power Complete your 2. Corrasion erosion sheet 3. Attrition 4. Corrosion 5. Abrasion Longshore Drift • “Longshore drift is a process by which sediments such as sand or other materials are transported along a beach.” • The general direction of longshore drift around the coasts of the British Isles is controlled by the direction of the dominant wind. http://www.bbc.co.uk/learningzo ne/clips/the-coastline- longshore-drift-and- spits/3086.html Longshore Drift: A bird’s eye view Cliff Beach Sea Longshore Drift: A bird’s eye view Cliff Eroded material Beach from the cliffs is left on the beach Bob the pebble Sea Longshore Drift: A bird’s eye view Cliff Beach Waves The waves from the sea come onto the beach at an angle and pick Bob and other material up and move them up the beach. Sea Longshore Drift: A bird’s eye view Cliff Beach Swash This movement of the waves is called SWASH. The waves come in at an angle due to Sea wind direction Longshore Drift: A bird’s eye view Cliff Beach The waves then move back down the beach in a straight Swash direction due to gravity. -

OCEANS ´09 IEEE Bremen
11-14 May Bremen Germany Final Program OCEANS ´09 IEEE Bremen Balancing technology with future needs May 11th – 14th 2009 in Bremen, Germany Contents Welcome from the General Chair 2 Welcome 3 Useful Adresses & Phone Numbers 4 Conference Information 6 Social Events 9 Tourism Information 10 Plenary Session 12 Tutorials 15 Technical Program 24 Student Poster Program 54 Exhibitor Booth List 57 Exhibitor Profiles 63 Exhibit Floor Plan 94 Congress Center Bremen 96 OCEANS ´09 IEEE Bremen 1 Welcome from the General Chair WELCOME FROM THE GENERAL CHAIR In the Earth system the ocean plays an important role through its intensive interactions with the atmosphere, cryo- sphere, lithosphere, and biosphere. Energy and material are continually exchanged at the interfaces between water and air, ice, rocks, and sediments. In addition to the physical and chemical processes, biological processes play a significant role. Vast areas of the ocean remain unexplored. Investigation of the surface ocean is carried out by satellites. All other observations and measurements have to be carried out in-situ using research vessels and spe- cial instruments. Ocean observation requires the use of special technologies such as remotely operated vehicles (ROVs), autonomous underwater vehicles (AUVs), towed camera systems etc. Seismic methods provide the foundation for mapping the bottom topography and sedimentary structures. We cordially welcome you to the international OCEANS ’09 conference and exhibition, to the world’s leading conference and exhibition in ocean science, engineering, technology and management. OCEANS conferences have become one of the largest professional meetings and expositions devoted to ocean sciences, technology, policy, engineering and education. -

3.2.6. Methods for Field Measurement and Remote Sensing of the Swash Zone
© Author(s) 2014. CC Attribution 4.0 License. ISSN 2047-0371 3.2.6. Methods for field measurement and remote sensing of the swash zone Sebastian J. Pitman1 1 Ocean and Earth Sciences, National Oceanography Centre, University of Southampton ([email protected]) ABSTRACT: Swash action is the dominant process responsible for the cross-shore exchange of sediment between the subaerial and subaqueous zones, with a significant part of the littoral drift also taking place as a result of swash motions. The swash zone is the area of the beach between the inner surfzone and backbeach that is intermittently submerged and exposed by the processes of wave uprush and backwash. Given the dominant role that swash plays in the morphological evolution of a beach, it is important to understand and quantify the main processes. The extent of swash (horizontally and vertically), current velocities and suspended sediment concentrations are all parameters of interest in the study of swash processes. In situ methods of measurements in this energetic zone were instrumental in developing early understanding of swash processes, however, the field has experienced a shift towards remote sensing methods. This article outlines the emergence of high precision technologies such as video imaging and LIDAR (light detection and ranging) for the study of swash processes. Furthermore, the applicability of these methods to large-scale datasets for quantitative analysis is demonstrated. KEYWORDS: run-up, morphodynamics, coastal imaging, video, LIDAR. Introduction al., 2004) and its dominant responses are largely well understood. It is the most The beachface is a highly spatially and energetic zone in terms of bed sediment temporally dynamic zone, predominantly due movement and is characterised by strong and to swash processes such as wave run up. -
Under Pressure Coastal Stack & Stump: Sediment Are Thrown Against Weathering (Freeze- the Cliffs by Waves
Tides: UP1 –Waves & Tides Constructive Waves: Longshore Drift: Transportation: • These are the rise and fall of the sea level, due • Traction: mainly to the pull of the moon • Strong swash and weak backwash that • Waves approach the beach at an angle due Large boulders and sediments • As the moon travels around the Earth, it push sand and pebbles up the beach to the prevailing wind direction are rolled along the sea bed. attracts the sea and pulls it upwards. The sun • Low waves with longer gaps between the • As the wave breaks, the swash carries They are too heavy to be helps too – but its much further away. So its crests (6-8 per min – low frequency) material up the beach at the same angle pull is not as strong. • Under 1m (oblique angle) as the prevailing wind picked up fully by the waves. • High tide occurs about every 12 and ½ hours, • Known as spilling waves as they ‘spill’ up • The backwash carries material back down with low tides in between. The difference the beach the beach at a right angle (90o) due to • Saltation: between the high and low tide is called the tidal • Gently sloping wave front gravity where small pieces of shingle range • Formed by storms often 100s KMs away • This means that material is moved along the or large sand grains are • Gentle beach beach in a zig zag route bounced along the sea bed. Waves: Destructive Waves: • Suspension: • Are formed by wind that blows over the sea, friction with the surface of water causes • Weak swash and strong backwash pulling small particles such as silts ripples to form and these develop into waves. -

The Impact of the Historical Development of Typography on Modern Classification of Typefaces
M. Tomiša et al. Utjecaj povijesnog razvoja tipografije na suvremenu klasifikaciju pisama ISSN 1330-3651 (Print), ISSN 1848-6339 (Online) UDC/UDK 655.26:003.2 THE IMPACT OF THE HISTORICAL DEVELOPMENT OF TYPOGRAPHY ON MODERN CLASSIFICATION OF TYPEFACES Mario Tomiša, Damir Vusić, Marin Milković Original scientific paper One of the definitions of typography is that it is the art of arranging typefaces for a specific project and their arrangement in order to achieve a more effective communication. In order to choose the appropriate typeface, the user should be well-acquainted with visual or geometric features of typography, typographic rules and the historical development of typography. Additionally, every user is further assisted by a good quality and simple typeface classification. There are many different classifications of typefaces based on historical or visual criteria, as well as their combination. During the last thirty years, computers and digital technology have enabled brand new creative freedoms. As a result, there are thousands of fonts and dozens of applications for digitally creating typefaces. This paper suggests an innovative, simpler classification, which should correspond to the contemporary development of typography, the production of a vast number of new typefaces and the needs of today's users. Keywords: character, font, graphic design, historical development of typography, typeface, typeface classification, typography Utjecaj povijesnog razvoja tipografije na suvremenu klasifikaciju pisama Izvorni znanstveni članak Jedna je od definicija tipografije da je ona umjetnost odabira odgovarajućeg pisma za određeni projekt i njegova organizacija s ciljem ostvarenja što učinkovitije komunikacije. Da bi korisnik mogao odabrati pravo pismo za svoje potrebe treba prije svega dobro poznavati optičke ili geometrijske značajke tipografije, tipografska pravila i povijesni razvoj tipografije. -
Waves: Part 2 I
Waves: Part 2 I. Types of Waves A. Deep-Water Waves and Shallow-Water Waves Deep-water waves are waves that move in water deeper than one-half their wavelength. B. When deep-water waves begin to interact with the ocean floor, the waves are called shallow- water waves. I. Types of Waves, continued C. Shore Currents When waves crash on the beach head-on, the water they moved through flows back to the ocean underneath new incoming waves. D. This movement of water forms a subsurface current that pulls objects out to sea and is called an undertow. I. Types of Waves, continued E. Longshore Currents are water currents that travel near and parallel to the shore line. F. Longshore currents form when waves hit the shore at an angle. G. Longshore currents transport most of the sediment in beach environments I. Types of Waves, continued H. Open-Ocean Waves Sometimes waves called whitecaps and swells form in the open ocean. I. White, foaming waves with very steep crests that break in the open ocean before the waves get close to the shore are called whitecaps. J. Rolling waves that move steadily across the ocean are called swells. I. Types of Waves, continued K. Tsunamis are waves that form when a large volume of ocean water is suddenly moved up or down. This movement can be caused by underwater earthquakes, as shown below. Destructive Forces Video I. Types of Waves, continued L. Storm Surges are local rises in sea level near the shore that are caused by strong winds from a storm. -

Turbulence in the Swash and Surf Zones: a Review
Coastal Engineering 45 (2002) 129–147 www.elsevier.com/locate/coastaleng Turbulence in the swash and surf zones: a review Sandro Longo a,*, Marco Petti b,1, Inigo J. Losada c,2 aDepartment of Civil Engineering, University of Parma, Parco Area delle Scienze, 181/A, 43100 Parma, Italy bDipartimento di Georisorse e Territorio, Faculty of Engineering, University of Udine, Via del Cotonificio, 114, 33100 Udine, Italy cOcean and Coastal Research Group, Universidad de Cantabria, E.T.S.I.C.C. y P. Av. de los Castros s/n, 39005 Santander, Spain Abstract This paper reviews mainly conceptual models and experimental work, in the field and in the laboratory, dedicated during the last decades to studying turbulence of breaking waves and bores moving in very shallow water and in the swash zone. The phenomena associated with vorticity and turbulence structures measured are summarised, including the measurement techniques and the laboratory generation of breaking waves or of flow fields sharing several characteristics with breaking waves. The effect of air entrapment during breaking is discussed. The limits of the present knowledge, especially in modelling a two- or three-phase system, with air and sediment entrapped at high turbulence level, and perspectives of future research are discussed. D 2002 Elsevier Science B.V. All rights reserved. Keywords: Swash zone; Surf zone; Breaking waves; Turbulence; Length scales; Coastal hydrodynamics 1. Introduction short and long waves, currents, turbulence and vorti- ces may be present. Therefore, the hydrodynamics to The swash zone is defined as the part of the beach be found in the swash zone is largely determined by between the minimum and maximum water levels the boundary conditions imposed by the beach face during wave runup and rundown.