Thesis Final Version - 43 ... Enaich.Pdf
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Brussels Aterloose Charleroisestwg
E40 B R20 . Leuvensesteenweg Ninoofsestwg acqmainlaan J D E40 E. oningsstr K Wetstraat E19 an C ark v Belliardstraat Anspachlaan P Brussel Jubelpark Troonstraat Waterloolaan Veeartsenstraat Louizalaan W R20 aversestwg. T Kroonlaan T. V erhaegenstr Livornostraat . W Louizalaan Brussels aterloose Charleroisestwg. steenweg Gen. Louizalaan 99 Avenue Louise Jacqueslaan 1050 Brussels Alsembergsesteenweg Parking: Brugmannlaan Livornostraat 14 Rue de Livourne A 1050 Brussels E19 +32 2 543 31 00 A From Mons/Bergen, Halle or Charleroi D From Leuven or Liège (Brussels South Airport) • Driving from Leuven on the E40 motorway, go straight ahead • Driving from Mons on the E19 motorway, take exit 18 of the towards Brussels, follow the signs for Centre / Institutions Brussels Ring, in the direction of Drogenbos / Uccle. européennes, take the tunnel, and go straight ahead until you • Continue straight ahead for about 4.5 km, following the tramway reach the Schuman roundabout. (the name of the road changes : Rue Prolongée de Stalle, Rue de • Take the 2nd road on the right to Rue de la Loi. Stalle, Avenue Brugmann, Chaussée de Charleroi). • Continue straight on until you cross the Small Ring / Boulevard du • About 250 metres before Place Stéphanie there are traffic lights: at Régent. Turn left and take the small Ring (tunnels). this crossing, turn right into Rue Berckmans. At the next crossing, • See E turn right into Rue de Livourne. • The entrance to the car park is at number 14, 25 m on the left. E Continue • Follow the tunnels and drive towards La Cambre / Ter Kameren B From Ghent (to the right) in the tunnel just after the Louise exit. -

From Brussels National Airport (Zaventem)
From Brussels National Airport (Zaventem) Æ By taxi - It takes about 20 minutes to get to the CEN premises (longer at rush hour). (cost: approx. 25 €) Æ By train - The Brussels Airport Express to the Central Station (Gare Centrale / Centraal Station) runs approximately every 15 minutes and takes about 25 minutes. (cost: 2,5 €) From the Central Station Æ On foot - It takes about 15 minutes. Æ By taxi - (cost: approx. 7,50 €) Æ By underground (Metro) (cost: 1,40 € for a one way ticket) Take the metro line 1a (yellow) or 1b (red) direction STOCKEL / H. DEBROUX. Change in ARTS-LOI / KUNST WET to metro line 2 (orange) direction CLEMENCEAU. Get off at PORTE DE NAMUR / NAAMSEPOORT, which is at approximately 100 m from the CEN premises. From the South Station (Gare du Midi / Zuidstation) Æ By taxi (cost: approx. 10,00 €) Æ By underground (Metro) (cost: 1,40 € for a one way ticket) Take metro line 2 (orange) direction SIMONIS. Get off at PORTE DE NAMUR / NAAMSEPOORT, which is at approximately 100 m from the CEN premises. Æ Coming from the E19 – Paris: in Drogenbos at sign BRUSSEL/BRUXELLES / INDUSTRIE ANDERLECHT, Exit: 17 - Follow the ramp for about 0,5 km and turn left. Follow Boulevard Industriel for 2 km. Follow the roundabout Rond- Point Hermes for 80 m. Turn right and follow Boulevard Industriel for 1 km. In Saint-Gilles, turn left, follow the Avenue Fonsny for 890 m. In Brussels turn right, and go into the tunnel. Take exit Porte de Namur. At the Porte de Namur turn right into the Chaussée d’Ixelles. -

Flying Green from a Carbon Neutral Airport: the Case of Brussels
sustainability Article Flying Green from a Carbon Neutral Airport: The Case of Brussels Kobe Boussauw 1,* and Thomas Vanoutrive 2 1 Cosmopolis Centre for Urban Research—Department of Geography, Vrije Universiteit Brussel, B-1050 Brussels, Belgium 2 Urban Studies Institute and Research Group for Urban Development, University of Antwerp, B-2000 Antwerp, Belgium; [email protected] * Correspondence: [email protected]; Tel.: +32-2-629-35-11 Received: 9 March 2019; Accepted: 2 April 2019; Published: 9 April 2019 Abstract: The aviation sector is one of the fastest growing emitters of greenhouse gases worldwide. In addition, airports have important local environmental impacts, mainly in the form of noise pollution and deterioration in air quality. Although noise nuisance in the vicinity of airports is recognized as an important problem of the urban environment which is often addressed by regulation, other environmental problems associated with aviation are less widely acknowledged. In the climate debate, the importance of which is rising, aviation has remained under the radar for decades. In the present paper, we use the case of Brussels Airport (Belgium) to demonstrate that the local perception of air travel-related environmental problems may be heavily influenced by the communication strategy of the airport company in question. Basing our analysis on publicly available data, communication initiatives, media reports, and policy documents, we find that (1) the noise impact of aviation is recognized and mainly described in an institutionalized format, (2) the impact of aviation on local air quality is ignored, and (3) the communication on climate impact shows little correspondence or concern with the actual effects. -

Annual Report
AANNUALNNUAL RREPORTEPORT 2007 FINANCIAL CALENDAR Announcement annual results as at 31 December 2007: Tuesday 19 February 2008 General meeting of shareholders: Wednesday 2 April 2008 at 4.30 pm Dividend payable: as from Friday 18 April 2008 Announcement results as at 31 March 2008: Tuesday 13 May 2008 Announcement half year results as at 30 June 2008: Tuesday 5 August 2008 Announcement results as at 30 September 2008: Monday 3 November 2008 KEY FIGURES INVESTMENT PROPERTY 31.12.2007 31.12.2006 Total lettable area (m²) 505.363 452.168 Occupancy rate (%) 92 % 92 % Fair value of investment properties (€ 000) 565.043 506.741 Investment value of investment properties (€ 000) 579.475 519.653 BALANCE SHEET INFORMATION 31.12.2007 31.12.2006 Shareholders’ equity (€ 000) 348.521 333.102 Debt ratio RD 21 June 2006 (max. 65 %) (%) 39 % 45 % RESULTS (€ 000) 31.12.2007 31.12.2006 Net rental income 41.083 42.414 Property management costs and income 445 590 Property result 41.528 43.004 Property charges -4.040 -3.840 General costs and other operating cost and income -1.241 -1.344 Operating result before result on the portfolio 36.247 37.820 Result on the portfolio 13.036 18.464 Operating result 49.283 56.284 Financial result -9.556 -12.041 Taxes -29 -38 Net result 39.698 44.205 DATA PER SHARE 31.12.2007 31.12.2006 Number of shares 13.900.902 13.882.662 Number of shares entitled to dividend 13.900.902 13.882.662 Net asset value (fair value) (€) 25,07 23,99 Net asset value (investment value) (€) 26,11 24,92 Gross dividend (€) 1,87 Net dividend (€) 1,65 -

“ I Feel Increasingly Like a Citizen of the World”
expat Spring 2013 • n°1 timeEssential lifestyle and business insights for foreign nationals in Belgium INTERVIEW “ I feel increasingly like a citizen of the world” SCOTT BEARDSLEY Senior partner, McKinsey & Company IN THIS ISSUE Property for expats Yves Saint Laurent shines in Brussels The smart investor 001_001_ExpatsTime01_cover.indd 1 11/03/13 17:41 ING_Magazine_Gosselin_Mar2013.pdf 1 11/03/2013 14:53:19 001_001_ExpatsTime01_pubs.indd 1 11/03/13 17:48 Welcome to your magazine t’s a great pleasure for me to bring you the fi rst issue of Expat Time, the quarterly business and lifestyle maga- zine for foreign nationals in Belgium. Why a new magazine for the internationally mobile Icommunity in Belgium? Belgium already has several good English-language magazines for this demographic. However, from listening to our clients, we have realised that there is a keen interest in business and lifestyle matters that aren’t covered by the current expat magazine offer. Subjects like estate planning, pensions, property, work culture, starting a business in Belgium, investments and taxation are of real interest to you, but they don’t seem to be answered in full by any of the current English-language expat magazines. That is a long sentence full of dry business and investment content. It is, however, our commitment to bring a fresh and lively perspective to these subjects with the help of respected experts in the various fi elds. We will look not only at topics related to business in Belgium. The other half of Expat Time will be much lighter and devoted to lifestyle in Belgium: insights from expats in Belgium, a regular light-hearted feature on fundamental changes in the world, arts and culture, events and more. -

Brussels 1 Brussels
Brussels 1 Brussels Brussels • Bruxelles • Brussel — Region of Belgium — • Brussels-Capital Region • Région de Bruxelles-Capitale • Brussels Hoofdstedelijk Gewest A collage with several views of Brussels, Top: View of the Northern Quarter business district, 2nd left: Floral carpet event in the Grand Place, 2nd right: Brussels City Hall and Mont des Arts area, 3rd: Cinquantenaire Park, 4th left: Manneken Pis, 4th middle: St. Michael and St. Gudula Cathedral, 4th right: Congress Column, Bottom: Royal Palace of Brussels Flag Emblem [1] [2][3] Nickname(s): Capital of Europe Comic city Brussels 2 Location of Brussels(red) – in the European Union(brown & light brown) – in Belgium(brown) Coordinates: 50°51′0″N 4°21′0″E Country Belgium Settled c. 580 Founded 979 Region 18 June 1989 Municipalities Government • Minister-President Charles Picqué (2004–) • Governor Jean Clément (acting) (2010–) • Parl. President Eric Tomas Area • Region 161.38 km2 (62.2 sq mi) Elevation 13 m (43 ft) [4] Population (1 January 2011) • Region 1,119,088 • Density 7,025/km2 (16,857/sq mi) • Metro 1,830,000 Time zone CET (UTC+1) • Summer (DST) CEST (UTC+2) ISO 3166 BE-BRU [5] Website www.brussels.irisnet.be Brussels (French: Bruxelles, [bʁysɛl] ( listen); Dutch: Brussel, Dutch pronunciation: [ˈbrʏsəɫ] ( listen)), officially the Brussels Region or Brussels-Capital Region[6][7] (French: Région de Bruxelles-Capitale, [ʁe'ʒjɔ̃ də bʁy'sɛlkapi'tal] ( listen), Dutch: Brussels Hoofdstedelijk Gewest, Dutch pronunciation: [ˈbrʏsəɫs ɦoːft'steːdələk xəʋɛst] ( listen)), is the capital -
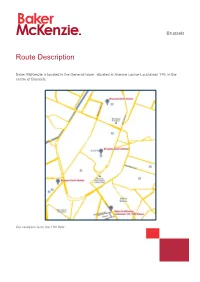
Route Description
Brussels Route Description Baker McKenzie is located in the Generali tower, situated at Avenue Louise-Louizalaan 149, in the centre of Brussels. Our reception is on the 11th floor Parking facilities Route Do not take the exit "Louiza", Do keep right and ± 50 m From Antwerp: Generali-building further (still in the tunnel) Highway E19 Antwerp - turn right, exit "Ter Kameren At the traffic lights, in front of Brussels the Generali-building, turn Bos" right in the Defacqzstraat-rue Ringroad (direction Ostend - Defacqz. Ghent - Bergen - leave the tunnel at the first Charleroi...) exit. Continue for 50 m until the first cross roads Exit Brussels Centre - At the Louizalaan straight Koekelberg ahead for ± 200 m until the Turn left traffic lights (cross road with The underground parking lot Always straight ahead "Defacqzstraatrue Defacqz") (Keizer Karellaan-Avenue is at about 30 m on your left Charles Quint) Obliquely in front of you, on side (Parking Tour Louise) your right, is the Generali- In front of basilica building. (Koekelberg): take tunnel Aboveground Leopold II From Liège There are parking places just in Do not take the exit "Louiza", front of the Generali-building Do keep right and ± 50 m From Liege (Louizalaan-avenue Louise). further (still in the tunnel) Highway E40 Liege - turn right, exit "Ter Kameren Brussels Bos" Public Transport Follow direction Centre Leave the tunnel at the first ("Kortenbergtunnel-Tunnel Our offices are easy to reach by exit. de Cortenbergh") public transport: At the Louizalaan straight At the "Kortenberglaan- ahead for ± 200 m until the Avenue de Cortenbergh In the "Zuid Station" (Midi traffic lights (crossroad with "follow the road until the Station) take the subway "Defazqzstraat-rue "SchumannpleinPlace direction "Simonis - Defacqz") Schumann" Elisabeth". -

Heritage Days 14 & 15 Sept
HERITAGE DAYS 14 & 15 SEPT. 2019 A PLACE FOR ART 2 ⁄ HERITAGE DAYS Info Featured pictograms Organisation of Heritage Days in Brussels-Capital Region: Urban.brussels (Regional Public Service Brussels Urbanism and Heritage) Clock Opening hours and Department of Cultural Heritage dates Arcadia – Mont des Arts/Kunstberg 10-13 – 1000 Brussels Telephone helpline open on 14 and 15 September from 10h00 to 17h00: Map-marker-alt Place of activity 02/432.85.13 – www.heritagedays.brussels – [email protected] or starting point #jdpomd – Bruxelles Patrimoines – Erfgoed Brussel The times given for buildings are opening and closing times. The organisers M Metro lines and stops reserve the right to close doors earlier in case of large crowds in order to finish at the planned time. Specific measures may be taken by those in charge of the sites. T Trams Smoking is prohibited during tours and the managers of certain sites may also prohibit the taking of photographs. To facilitate entry, you are asked to not B Busses bring rucksacks or large bags. “Listed” at the end of notices indicates the date on which the property described info-circle Important was listed or registered on the list of protected buildings or sites. information The coordinates indicated in bold beside addresses refer to a map of the Region. A free copy of this map can be requested by writing to the Department sign-language Guided tours in sign of Cultural Heritage. language Please note that advance bookings are essential for certain tours (mention indicated below the notice). This measure has been implemented for the sole Projects “Heritage purpose of accommodating the public under the best possible conditions and that’s us!” ensuring that there are sufficient guides available. -

Report on 50 Years of Mobility Policy in Bruges
MOBILITEIT REPORT ON 50 YEARS OF MOBILITY POLICY IN BRUGES 4 50 years of mobility policy in Bruges TABLE OF CONTENTS Introduction by Burgomaster Dirk De fauw 7 Reading guide 8 Lexicon 9 Research design: preparing for the future, learning from the past 10 1. Once upon a time there was … Bruges 10 2. Once upon a time there was … the (im)mobile city 12 3. Once upon a time there was … a research question 13 1 A city-wide reflection on mobility planning 14 1.1 Early 1970s, to make a virtue of necessity (?) 14 1.2 The Structure Plan (1972), a milestone in both word and deed 16 1.3 Limits to the “transitional scheme” (?) (late 1980s) 18 1.4 Traffic Liveability Plan (1990) 19 1.5 Action plan ‘Hart van Brugge’ (1992) 20 1.6 Mobility planning (1996 – present) 21 1.7 Interim conclusion: a shift away from the car (?) 22 2 A thematic evaluation - the ABC of the Bruges mobility policy 26 5 2.1 Cars 27 2.2 Buses 29 2.3 Circulation 34 2.4 Heritage 37 2.5 Bicycles 38 2.6 Canals and bridges 43 2.7 Participation / Information 45 2.8 Organisation 54 2.9 Parking 57 2.10 Ring road(s) around Bruges 62 2.11 Spatial planning 68 2.12 Streets and squares 71 2.13 Tourism 75 2.14 Trains 77 2.15 Road safety 79 2.16 Legislation – speed 83 2.17 The Zand 86 3 A city-wide evaluation 88 3.1 On a human scale (objective) 81 3.2 On a city scale (starting point) 90 3.3 On a street scale (means) 91 3.4 Mobility policy as a means (not an objective) 93 3.5 Structure planning (as an instrument) 95 3.6 Synthesis: the concept of ‘city-friendly mobility’ 98 3.7 A procedural interlude: triggers for a transition 99 Archives and collections 106 Publications 106 Websites 108 Acknowledgements 108 6 50 years of mobility policy in Bruges DEAR READER, Books and articles about Bruges can fill entire libraries. -
Accommodation – Practical Information
SAP Education Center Belgium, Evere – Practical Information Accommodation – Practical information Welcome to the SAP Education Belgium Training Center! This information guide is designed to make your stay beneficial and comfortable. Please note that this version can be changed and/or updated at any time. For any remarks, please contact our Education department at extension 666 or via e- mail: [email protected]. Table of content 1. Accessibility a. By car b. By train c. By bus/tramway 2. Hotels a. Marriott Courtyard (next door) b. SAP Education Hotel booker SAP Education Center Belgium, Evere – Practical Information 1. Accessibility a. By car From the Brussels Airport Direct access via the Boulevard Léopold III (without taking the Brussels Ring R0) SAP Education Center Belgium, Evere – Practical Information From the Ring or E40 (Leuven/Louvain-Liège/Luik) Direct access via the Boulevard Léopold III. Take the Ring. Exit ‘3 EVERE’ direction Avenue du Bourget. SAP Education Center Belgium, Evere – Practical Information From Brussels Center Direction is Place Meiser, Meiserplaats / Boulevard Reyers, Reyerslaan. From there, please go to the direction ‘Ring’ or ‘Airport’ through the Boulevard Léopold III. Meiser Reyers SAP Education Center Belgium, Evere – Practical Information Parking facilities at a walking distance. Next to the Marriott hotel there is a public parking. This parking is accessible for all SAP and non-SAP customers. Parking places around the building will be paying. (incl. streets) Please do note that SAP is not responsible for any theft or damage that may be caused to your car. So please be careful not to leave any valuable document or item in your car. -

National Reform Programme 2018
National Reform Programme 2017 April 2017 Inhoud 1. Introduction ............................................................................................................................................................... 1 2. Macroeconomic scenario ......................................................................................................................................... 2 3. Country-Specific recommendations ....................................................................................................................... 3 3.1. Budget consolidation (Recommendation 1) 3 3.2. Competitiveness and labour market (Recommendation 2) 3 3.2.1. Wage formation was revised 3 3.2.2. The activation policy was allocated to the regions and simplified 4 3.2.3. Education and vocational training have been reformed 5 3.2.4. Additional attention to people from a migrant background 6 3.3. Competitiveness and competition (Recommendation 3) 7 3.3.1. Capacity to innovate 7 3.3.2. Competition in business services 8 3.3.3. Investments in transport and energy 9 4. Europe 2020 objectives .......................................................................................................................................... 11 4.1. Employment 11 4.1.1. Tackling long-term unemployment and industrial restructuring processes 11 4.1.2. Modernise the labour market and facilitate combining work and private life 12 4.1.3. Take full advantage of the potential of the digital economy 12 4.2. R&D and innovation 13 4.3. Education and training 16 4.3.1. Higher education 16 4.3.2. Early school leaving 17 4.3.3. Inequalities in education 18 4.4. Energy and climate 20 4.5. Social inclusion 23 4.5.1. Ensuring the social protection of the population 23 4.5.2. Reduction of child poverty 24 4.5.3. Active Inclusion of people far from the labour market 24 4.5.4. Fight against inadequate housing and homelessness 25 4.5.5. Reception and integration of people from a migrant background 26 5. -

Who Benefits from Home Ownership Support Policies in Brussels?
Brussels Studies La revue scientifique électronique pour les recherches sur Bruxelles / Het elektronisch wetenschappelijk tijdschrift voor onderzoek over Brussel / The e-journal for academic research on Brussels Collection générale | 2010 Who benefits from home ownership support policies in Brussels? À qui profitent les politiques d’aide à l’acquisition de logements à Bruxelles ? Wie is gebaat bij de beleidsmaatregelen die de aankoop van de gezinswoning in Brussel ondersteunen? Alice Romainville Translator: Jane Corrigan Electronic version URL: http://journals.openedition.org/brussels/742 DOI: 10.4000/brussels.742 ISSN: 2031-0293 Publisher Université Saint-Louis Bruxelles Electronic reference Alice Romainville, « Who benefits from home ownership support policies in Brussels? », Brussels Studies [Online], General collection, no 34, Online since 25 January 2010, connection on 30 April 2019. URL : http://journals.openedition.org/brussels/742 ; DOI : 10.4000/brussels.742 Licence CC BY the e-journal for academic research on Brussels www.brusselsstudies.be Issue 34, 25 january 2010. ISSN 2031-0293 Alice Romainville Who benefits from home ownership support policies in Brussels? Translation: Jane Corrigan The ownership support policies implemented by the Brussels Region are intended for certain categories of household and target certain neighbourhoods in the centre of the first ring. Via the different measures which have been established, the Region chan- nels private investment towards certain working-class neighbourhoods to which it would like to attract private developers and a more well-to-do population. The analysis shows that the tools intended for ‘middle-income’ households are used mainly in the central neighbourhoods, in particular along the canal, whereas the measures intended for the most disadvantaged households cause migrations from the central areas towards the western part of the Region.