Monolithic Wireless Transceiver Design
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

DIO Wireless Transceiver
M O C I U T N I DIO Wireless Transceiver MULTIFUNCTIONAL CONTACT CLOSURE SOLUTION R E FUNCTIONALITY AND FLEXIBILITY V KEY FEATURES I The Intuicom DIO provides bi-directional E • “Best-in-Class” RF C communication with 16 individual channels, performance S eight (8) input and eight (8) output, for a • Robust on-off control and N virtually limitless number of I/O routing possi- monitoring of multiple A bilities including positive confirmation of events R command execution. T • Long range, error free, low latency performance S • Eight (8) dry contact/low S “BEST-IN-CLASS” RF PERFORMANCE E voltage input channels L Employing Intuicom’s robust and secure • Eight (8) open collector E The Intuicom DIO is a high performance frequency hopping spread spectrum output channels R technology, the Intuicom DIO is inherently I wireless contact closure radio for • Software mapping of input resistant to interference from other RF and output channels W ON-OFF and Detection applications. Designed for short and long-range error- equipment including other spread spectrum • Confirmation ability O radios. Empowered with an ultra-sensitive, • I free communications, the DIO delivers a Single Unit Operation™, highly-selective RF transceiver, the Intuicom D Any one unit may serve as complete bi-directional wireless I/O DIO provides real-time, robust communication Master, Remote, Repeater capability for point-to-point, point-to- links with 32-bit CRC with error correction. or Remote/Repeater multipoint and multipoint-to-multipoint The Intuicom DIO is capable of delivering the • 900 MHz or 2.4 GHz applications, providing an alternative to maximum output power allowable by the FCC license free operation hardwire, fiber and other RF solutions. -

FCC Element 1 Question Pool
FCC Commercial Element 1 Question Pool (approved 25 June 2009) Subelement A – Rules & Regulations: 6 Key Topics, 6 Exam Questions Key Topic 1: Equipment Requirements 1-1A1 What is a requirement of all marine transmitting apparatus used aboard United States vessels? A. Only equipment that has been certified by the FCC for Part 80 operations is authorized. B. Equipment must be type-accepted by the U.S. Coast Guard for maritime mobile use. C. Certification is required by the International Maritime Organization (IMO). D. Programming of all maritime channels must be performed by a licensed Marine Radio Operator. 1-1A2 What transmitting equipment is authorized for use by a station in the maritime services? A. Transmitters that have been certified by the manufacturer for maritime use. B. Unless specifically excepted, only transmitters certified by the Federal Communications Commission for Part 80 operations. C. Equipment that has been inspected and approved by the U.S. Coast Guard. D. Transceivers and transmitters that meet all ITU specifications for use in maritime mobile service. 1-1A3 Small passenger vessels that sail 20 to 150 nautical miles from the nearest land must have what additional equipment? A. Inmarsat-B terminal. B. Inmarsat-C terminal. C. Aircraft Transceiver with 121.5 MHz. D. MF-HF SSB Transceiver. 1-1A4 What equipment is programmed to initiate transmission of distress alerts and calls to individual stations? A. NAVTEX. B. GPS. C. DSC controller. D. Scanning Watch Receiver. 1-1A5 What is the minimum transmitter power level required by the FCC for a medium-frequency transmitter aboard a compulsorily fitted vessel? A. -

MIMO Transceiver with Afe76xx for LTE and 5G Wireless Radio
www.ti.com Table of Contents Application Report MIMO Transceiver with AFE76xx for LTE and 5G Wireless Radio Ebenezer Dwobeng ABSTRACT In this application report, the implementation and performance of a radio transceiver suitable for multiple-input multiple-output (MIMO) wireless communications will be presented. AFE76xx is the main device used for the transceiver design. This device integrates 4 analog-to-digital converters (ADCs), 4 digital-to-analog converters (DACs) and a phase-locked loop (PLL) for sampling clock generation. The main advantage of this MIMO transceiver implementation is the high level of integration, which makes it easier to expand to larger antenna arrays via synchronization of multiple AFE76xx devices. Also the direct RF-sampling based data converters eliminate common analog impairments in radio transceiver design such as local oscillator (LO) leakage and sideband image. Table of Contents 1 Introduction.............................................................................................................................................................................2 2 System Overview.................................................................................................................................................................... 4 3 Constellation........................................................................................................................................................................... 8 4 Error Vector Magnitude (EVM)...............................................................................................................................................9 -

Radio Transceiver System Design with Emphasis on Parameters Which Affect Range
www.vanteon.com Radio Transceiver System Design With Emphasis on Parameters Which Affect Range Tony Manicone, Principal RF Engineer September 2012 Fig 1 1 www.vanteon.com ABSTRACT This paper will describe the basic impairments which reduce communications range in a radio system. Typically these are factors such as: Transmit Power and losses in the transmit chain, Power Amplifier non-linearity, etc. Receiver and Transmitter antenna choice, grounding, location, and impedance matching. Propagation path impairments such as Free Space Loss, Absorption (building materials, vegetation, moisture, etc), Multipath Destructive Interference, Fading, etc. Receiver Sensitivity and criteria which affect it such as Noise Figure, Bandwidth, Signal to Noise Ratio, Phase Noise, etc. The ramifications of each of these effects would be discussed in terms of degradation to communications range as well as the “cost” of poor design practices. The paper is aimed at people who currently use or need a radio communications system and want to learn many of the basic issues and constraints which affect communications range and radio design. The discussion is presented in several parts: Antennas Propagation Path Transmitter issues Receiver issues Process Gain Enhancements Communications range estimation calculations using a 2.4 GHz radio as an example. Some of the topics will be mentioned only briefly, as a full discussion is beyond the scope of this presentation, yet they are important issues that need to be touched on. 2 www.vanteon.com FUNDAMENTAL RADIO TRANSMISSION SYSTEM ANTENNA ANTENNA RADIO PROPAGATION RADIO TRANSMITTER PATH RECEIVER BASEBAND INPUT BASEBAND OUTPUT (Voice, Data, Video) (Voice, Data, Video) MODULATED MODULATED RADIO WAVE RADIO WAVE Fig 2 Fundamental Radio Transmission System All Radio transmission systems require, at a minimum: A Radio Transmitter, which converts (modulates) lower frequency baseband signals (data, voice, video…) onto higher frequency radio waves. -

Choosing a Ham Radio
Choosing a Ham Radio Your guide to selecting the right equipment Lead Author—Ward Silver, NØAX; Co-authors—Greg Widin, KØGW and David Haycock, KI6AWR • About This Publication • Types of Operation • VHF/UHF Equipment WHO NEEDS THIS PUBLICATION AND WHY? • HF Equipment Hello and welcome to this handy guide to selecting a radio. Choos- ing just one from the variety of radio models is a challenge! The • Manufacturer’s Directory good news is that most commercially manufactured Amateur Radio equipment performs the basics very well, so you shouldn’t be overly concerned about a “wrong” choice of brands or models. This guide is intended to help you make sense of common features and decide which are most important to you. We provide explanations and defini- tions, along with what a particular feature might mean to you on the air. This publication is aimed at the new Technician licensee ready to acquire a first radio, a licensee recently upgraded to General Class and wanting to explore HF, or someone getting back into ham radio after a period of inactivity. A technical background is not needed to understand the material. ABOUT THIS PUBLICATION After this introduction and a “Quick Start” guide, there are two main sections; one cov- ering gear for the VHF and UHF bands and one for HF band equipment. You’ll encounter a number of terms and abbreviations--watch for italicized words—so two glossaries are provided; one for the VHF/UHF section and one for the HF section. You’ll be comfortable with these terms by the time you’ve finished reading! We assume that you’ll be buying commercial equipment and accessories as new gear. -
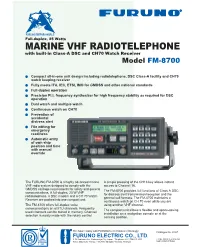
MARINE VHF RADIOTELEPHONE with Built-In Class-A DSC and CH70 Watch Receiver Model FM-8700
R FURUNO DEEPSEA WORLD Full-duplex, 25 Watts MARINE VHF RADIOTELEPHONE with built-in Class-A DSC and CH70 Watch Receiver Model FM-8700 ● Compact all-in-one unit design including radiotelephone, DSC Class-A facility and CH70 watch keeping receiver ● Fully meets ITU, IEC, ETSI, IMO for GMDSS and other national standards ● Full-duplex operation ● Precision PLL frequency synthesizer for high frequency stability as required for DSC operation ● Dual watch and multiple watch ● Continuous watch on CH70 ● Prevention of accidental distress alert ● File editing for emergency readiness ● Automatic entry of own ship position and time with manual override The FURUNO FM-8700 is a highly advanced marine A simple pressing of the CH16 key allows instant VHF radio system designed to comply with the access to Channel 16. GMDSS carriage requirements for safety and general The FM-8700 provides full functions of Class A DSC communications. A full-duplex, 25 W VHF for distress alert transmission/reception and the radiotelephone, a DSC modem and a CH 70 Watch general call formats. The FM-8700 maintains a Receiver are packed into one compact unit. continuous watch on CH 70 even while you are The FM-8700 offers full-duplex voice using another VHF channel. communications on all ITU channels. Frequently The compact unit allows a flexible and space-saving used channels can be stored in memory. Channel installation on a navigation console or at the selection is easily made with the rotary control. conning position. R The future today with FURUNO's electronics technology. Catalogue No. V-027 FURUNO ELECTRIC CO., LTD. -
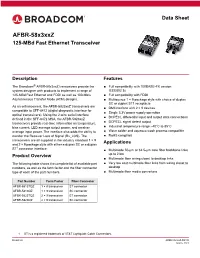
AFBR-58X3xxz: 125-Mbd Fast Ethernet Transceiver Data Sheet
Data Sheet AFBR-58x3xxZ 125-MBd Fast Ethernet Transceiver Description Features ® The Broadcom AFBR-58x3xxZ transceivers provide the Full compatibility with 100BASE-FX version system designer with products to implement a range of IEEE802.3u 125-MBd Fast Ethernet and FDDI as well as 100-Mb/s Full compatibility with FDDI Asynchronous Transfer Mode (ATM) designs. Multisource 1 × 9 package style with choice of duplex SC or duplex ST1 receptacle As an enhancement, the AFBR-5823xxZ transceivers are DMI interface with 2 × 9 devices compatible to SFF-8472 (digital diagnostic interface for Single 3.3V power supply operation optical transceivers). Using the 2-wire serial interface DCPECL differential input and output data connections defined in the SFF-8472 MSA, the AFBR-5823xxZ transceivers provide real-time information on temperature, DCPECL signal detect output bias current, LED average output power, and receiver Industrial temperature range –40°C to 85°C average input power. The interface also adds the ability to Wave solder and aqueous wash process compatible monitor the Receiver Loss of Signal (Rx_LOS). The RoHS compliant transceivers are all supplied in the industry standard 1 × 9 Applications and 2 × 9 package style with either a duplex SC or a duplex ST1 connector interface. Multimode 50-µm or 62.5-µm core fiber backbone links Product Overview up to 2 km Multimode fiber wiring closet to desktop links The following table shows the complete list of available part Very low cost multimode fiber links from wiring closet to numbers, as well as the form factor and the fiber connector desktop type of each of the part numbers. -

VHF-2100 VHF Transceiver
VHF-2100 VHF Transceiver component maintenance manual (with illustrated parts list) This manual includes data for the equipment that follows: Unit Model Collins Part No VHF-2100 VHF Transceiver VHF-2100 822-1287-001 Printed in the United States of America Rockwell Collins, Inc. © Copyright 2005 Rockwell Collins, Inc. All rights reserved. Cedar Rapids, Iowa 52498 523-0790322-111113 1st Edition, Jul 01/2004 9+)B&00B-81B 1st Revision, Jun 06/2005 23-12-95 T-1 ROCKWELL COLLINS COMPONENT MAINTENANCE MANUAL with IPL VHF-2100, PART NO 822-1287 PROPRIETARY NOTICE FREEDOM OF INFORMATION ACT (5 USC 552) AND DISCLOSURE OF CONFIDENTIAL INFORMATION GENERALLY (18 USC 1905) This document and the information disclosed herein are proprietary data of Rockwell Collins, Inc. Neither this document nor the information contained herein shall be used, reproduced, or disclosed to others without the written authorization of Rockwell Collins, Inc., except to the extent required for installation or maintenance of recipient’s equipment. This document is being furnished in confidence by Rockwell Collins, Inc. The information disclosed herein falls within exemption (b) (4) of 5 USC 552 and the prohibitions of 18 USC 1905. SOFTWARE COPYRIGHT NOTICE © COPYRIGHT 2004-2005 ROCKWELL COLLINS, INC. ALL RIGHTS RESERVED. All software resident in this equipment is protected by copyright. We try to supply manuals that are free of errors, but some can occur. If a problem is found with this manual, you can send the necessary data to Rockwell Collins. When you report a specified problem, give short instructions. Include the manual part number, the paragraph or figure number, and the page number. -

Industrial Ethernet PHY Datasheet
TLK100 www.ti.com SLLS931B–AUGUST 2009–REVISED DECEMBER 2009 Industrial Temp, Single Port 10/100 Mb/s Ethernet Physical Layer Transceiver Check for Samples: TLK100 1 Introduction 1.1 Features 1 • Temperature From –40°C to 85°C • Bus I/O Protection - ±16kV JEDEC HBM • Low Power Consumption, < 200mW Typical • IEEE 802.3u PCS, 100BASE-TX Transceivers • Cable Diagnostics • Enables IEEE1588 Time-Stamping • Error-Free Operation up to 200 Meters Under • IEEE 1149.1 JTAG Typical Conditions • Integrated ANSI X3.263 Compliant TP-PMD • 3.3V MAC Interface Physical Sublayer with Adaptive Equalization • Auto-MDIX for 10/100 Mb/s and Baseline Wander Compensation • Energy Detection Mode • Programmable LED Support Link, 10/100 Mb/s • 25 MHz Clock Out Mode, Activity, and Collision Detect • MII Serial Management Interface (MDC and • 10/100 Mb/s Packet BIST (Built in Self Test) MDIO) • 48-pin TQFP Package (7mm) × (7mm) • IEEE 802.3u MII • IEEE 802.3u Auto-Negotiation and Parallel 1.2 Applications Detection • Industrial Controls and Factory Automation • IEEE 802.3u ENDEC, 10BASE-T • General Embedded Applications Transceivers and Filters 1.3 General Description The TLK100 is a single-port Ethernet PHY for 10BaseT and 100Base TX signaling. It integrates all the physical-layer functions needed to transmit and receive data on standard twisted-pair cables. This device supports the standard Media Independent Interface (MII) for direct connection to a Media Access Controller (MAC). The TLK100 is designed for power-supply flexibility, and can operate with a single 3.3V power supply or with combinations of 3.3V, 1.8V, and 1.1V power supplies for reduced power operation. -

QSFP28 Optical Transceiver –100 Gigabit Ethernet for up to 10 Km Reach LQ2 Series
QSFP28 Optical Transceiver –100 Gigabit Ethernet for up to 10 km Reach LQ2 Series www.lumentum.com Data Sheet QSFP28 Optical Transceiver –100 Gigabit Ethernet for up to 10 km Reach The Lumentum 100G QSFP28 LR4 Optical Transceiver is a full duplex, photonic-integrated optical transceiver that provides a high-speed link at aggregated data rate of either 103.125 Gbps or 111.81 Gbps over up to 10 km of SMF28. The module complies with IEEE 802.3-2015 Clause 88 and 83E standard and ITU-T G.959.1-2016-04. The transceiver integrates the receive and transmit path on one Key Features module. On the transmit side, four lanes of serial data are • Supports 100GBASE-LR4 for line rate of 103.125 Gbps and recovered by a programmable continuous time linear equalizer OTU4 for line rate of 111.81 Gbps (CTLE), retimed and passed to four laser drivers, which control • Integrated LAN WDM TOSA/ROSA for up to 10 km reach over four lasers with center wavelengths of 1296 nm, 1300 nm, 1305 SMF28 nm and 1309 nm. The optical signals are multiplexed to a • Duplex single mode LC optical receptacle single-mode fiber through an industry standard LC connector. On the receive side, four lanes of optical data streams are optically • Operating temperature range from 0°C to 70°C de-multiplexed by an integrated optical demultiplexer. Each data • Low power dissipation < 4 W stream is recovered by a PIN photodetector transimpedance • RoHS 6/6 compliant amplifier, retimed and passed to a CAUI-4 compliant output • Single 3.3 V power supply driver. -

Very-High-Frequency Aerosat Airborne Terminal
REFEBENCE USE ONLY. REPORT NO. FAA-RD-77-156 VERY-HIGH-FREQUENCY AEROSAT AIRBORNE TERMINAL E. 0. Kirner D. Kuntman J. Wilson BENDIX AVIONICS DIVISION P.O. Box 9414 Fort Lauderdale FL 33310 DECEMBER 1977 FINAL REPORT OOCUMENT IS AVAILABLE TO THE U.S. PUBLIC THROUGH THE NATIONAL TECHNICAL INFORMATION SERVICE, SPRINGFIELD VIRGINIA 22161 r $■; Prepared for U.S. DEPARTMENT OF TRANSPORTATION ^ FEDERAL AVIATION ADMINISTRATION "* Systems Research and Development Service 1 * Washington DC 20591 NOTICE This document is disseminated under the sponsorship of the Department of Transportation in the interest of information exchange. The United States Govern ment assumes no liability for its contents or use thereof. NOTICE The United States Government does not endorse pro ducts or manufacturers. Trade or manufacturers' names appear herein solely because they are con sidered essential to the object of this report. Technicol Report Documentation Pogc 1, Report No. 2. Governmentml AccessionA No. 3. Recipient's Calolrig No , FAA-RD-77-156 4. Title and Subtitle 5. Report Dole December 1977 VERY-HIGH-FREQUENCY AEROSAT AIRBORNE TERMINAL 6. Performing Organization Code 8. Performing Organization Report No. 7. Author's! li.O. Kirner, D. Kuntman, and J. Wilson DOT-TSC-FAA-77-17 9. Performing Organi lotion Name and Address 10. Work Unit No. fTRAIS) Bendix Avionics Division* FA711/R8122 P.O. Box 9414 1 1. Controct or Grcnt No. Fort Lauderdale FL 33310 DOT-TSC-1121 13. Type of Report and Period Covered 12. Sponsoring Agency Nome and Address Final Report U.S. Department of Transportation April 1976-March 1977 Federal Aviation Administration Systems Research and Development Service Sponsoring Agency Code Washington DC 20591 IS. -
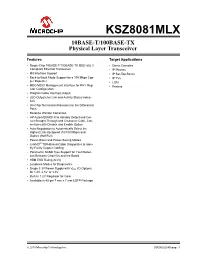
10BASE-T/100BASE-TX Physical Layer Transceiver
KSZ8081MLX 10BASE-T/100BASE-TX Physical Layer Transceiver Features Target Applications • Single-Chip 10BASE-T/100BASE-TX IEEE 802.3 • Game Consoles Compliant Ethernet Transceiver • IP Phones • MII Interface Support • IP Set-Top Boxes • Back-to-Back Mode Support for a 100 Mbps Cop- •IP TVs per Repeater •LOM • MDC/MDIO Management Interface for PHY Reg- • Printers ister Configuration • Programmable Interrupt Output • LED Outputs for Link and Activity Status Indica- tion • On-Chip Termination Resistors for the Differential Pairs • Baseline Wander Correction • HP Auto MDI/MDI-X to Reliably Detect and Cor- rect Straight-Through and Crossover Cable Con- nections with Disable and Enable Option • Auto-Negotiation to Automatically Select the Highest Link-Up Speed (10/100 Mbps) and Duplex (Half/Full) • Power-Down and Power-Saving Modes • LinkMD® TDR-Based Cable Diagnostics to Iden- tify Faulty Copper Cabling • Parametric NAND Tree Support for Fault Detec- tion Between Chip I/Os and the Board • HBM ESD Rating (6 kV) • Loopback Modes for Diagnostics • Single 3.3V Power Supply with VDD I/O Options for 1.8V, 2.5V, or 3.3V • Built-In 1.2V Regulator for Core • Available in 48-pin 7 mm x 7 mm LQFP Package 2018 Microchip Technology Inc. DS00002264B-page 1 KSZ8081MLX TO OUR VALUED CUSTOMERS It is our intention to provide our valued customers with the best documentation possible to ensure successful use of your Microchip products. To this end, we will continue to improve our publications to better suit your needs. Our publications will be refined and enhanced as new volumes and updates are introduced.