Randomized Communication in Radio Networks Has Concerned Mul- Tiple Access Channels
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Implementing MACA and Other Useful Improvements to Amateur Packet Radio for Throughput and Capacity
Implementing MACA and Other Useful Improvements to Amateur Packet Radio for Throughput and Capacity John Bonnett – KK6JRA / NCS820 Steven Gunderson – CMoLR Project Manager TAPR DCC – 15 Sept 2018 1 Contents • Introduction – Communication Methodology of Last Resort (CMoLR) • Speed & Throughput Tests – CONNECT & UNPROTO • UX.25 – UNPROTO AX.25 • Multiple Access with Collision Avoidance (MACA) – Hidden Terminals • Directed Packet Networks • Brevity – Directory Services • Trunked Packet • Conclusion 2 Background • Mission County – Proverbial: – Coastline, Earthquake Faults, Mountains & Hills, and Missions – Frequent Natural Disasters • Wildfires, Earthquakes, Floods, Slides & Tsunamis – Extensive Packet Networks • EOCs – Fire & Police Stations – Hospitals • Legacy 1200 Baud Packet Networks • Outpost and Winlink 2000 Messaging Software 3 Background • Mission County – Proverbial: – Coastline, Earthquake Faults, Mountains & Hills, and Missions – Frequent Natural Disasters • Wildfires, Earthquakes, Floods, Slides & Tsunamis – Extensive Packet Networks • EOCs – Fire & Police Stations – Hospitals • Legacy 1200 Baud Packet Networks • Outpost and Winlink 2000 Messaging Software • Community Emergency Response Teams: – OK Drills – Neighborhood Surveys OK – Triage Information • CERT Form #1 – Transmit CERT Triage Data to Public Safety – Situational Awareness 4 Background & Objectives (cont) • Communication Methodology of Last Resort (CMoLR): – Mission County Project: 2012 – 2016 – Enable Emergency Data Comms from CERT to Public Safety 5 Background & -

Reservation - Time Division Multiple Access Protocols for Wireless Personal Communications
tv '2s.\--qq T! Reservation - Time Division Multiple Access Protocols for Wireless Personal Communications Theodore V. Buot B.S.Eng (Electro&Comm), M.Eng (Telecomm) Thesis submitted for the degree of Doctor of Philosophy 1n The University of Adelaide Faculty of Engineering Department of Electrical and Electronic Engineering August 1997 Contents Abstract IY Declaration Y Acknowledgments YI List of Publications Yrt List of Abbreviations Ylu Symbols and Notations xi Preface xtv L.Introduction 1 Background, Problems and Trends in Personal Communications and description of this work 2. Literature Review t2 2.1 ALOHA and Random Access Protocols I4 2.1.1 Improvements of the ALOHA Protocol 15 2.1.2 Other RMA Algorithms t6 2.1.3 Random Access Protocols with Channel Sensing 16 2.1.4 Spread Spectrum Multiple Access I7 2.2Fixed Assignment and DAMA Protocols 18 2.3 Protocols for Future Wireless Communications I9 2.3.1 Packet Voice Communications t9 2.3.2Reservation based Protocols for Packet Switching 20 2.3.3 Voice and Data Integration in TDMA Systems 23 3. Teletraffic Source Models for R-TDMA 25 3.1 Arrival Process 26 3.2 Message Length Distribution 29 3.3 Smoothing Effect of Buffered Users 30 3.4 Speech Packet Generation 32 3.4.1 Model for Fast SAD with Hangover 35 3.4.2Bffect of Hangover to the Speech Quality 38 3.5 Video Traffic Models 40 3.5.1 Infinite State Markovian Video Source Model 41 3.5.2 AutoRegressive Video Source Model 43 3.5.3 VBR Source with Channel Load Feedback 43 3.6 Summary 46 4. -

A Survey on Aloha Protocol for Iot Based Applications
ISSN: 2277-9655 [Badgotya * et al., 7(5): May, 2018] Impact Factor: 5.164 IC™ Value: 3.00 CODEN: IJESS7 IJESRT INTERNATIONAL JOURNAL OF ENGINEERING SCIENCES & RESEARCH TECHNOLOGY A SURVEY ON ALOHA PROTOCOL FOR IOT BASED APPLICATIONS Shikha Badgotya*1 & Prof.Deepti Rai2 *1M.Tech Scholar, Department of EC, Alpine Institute of Technology,, Ujjain (India) 2H.O.D, Department of EC, Alpine Institute of Technology, Ujjain (India) DOI: 10.5281/zenodo.1246995 ABSTRACT With the emergence of IoT based applications in industries and automation, protocols for effective data transfer was the foremost need. The natural choice was a random access protocol like ALOHA which could be incorporated in the ultra narrowband ISM band framework because of its simplicity and lack of overhead. Pure ALOHA faced the limitation of greater rate of collisions among the packets of data and also there was higher level of frame delays. Slotted ALOHA overcame these limitations to some extent in which the transfer of data takes place after channel polling. Though the drawbacks of PURE ALOHA are somewhat resolved in Slotted ALOHA, still some redundant transmissions and delay of frames exist. The present proposed work puts forth an efficient mechanism for Slotted ALOHA which implements polling of channel that is non persistent in nature to reduce the probability of collisions considerably. Further it presents a channel sensing methodology also for prevention of burst errors. Interleaving serves to be useful in case of burst errors and helps in preserving useful information. The survey should pave the path for IoT based applications working on an ultra narrowband architecture. -
Medium Access Control Layer
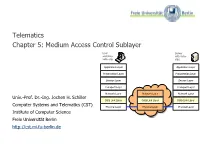
Telematics Chapter 5: Medium Access Control Sublayer User Server watching with video Beispielbildvideo clip clips Application Layer Application Layer Presentation Layer Presentation Layer Session Layer Session Layer Transport Layer Transport Layer Network Layer Network Layer Network Layer Univ.-Prof. Dr.-Ing. Jochen H. Schiller Data Link Layer Data Link Layer Data Link Layer Computer Systems and Telematics (CST) Physical Layer Physical Layer Physical Layer Institute of Computer Science Freie Universität Berlin http://cst.mi.fu-berlin.de Contents ● Design Issues ● Metropolitan Area Networks ● Network Topologies (MAN) ● The Channel Allocation Problem ● Wide Area Networks (WAN) ● Multiple Access Protocols ● Frame Relay (historical) ● Ethernet ● ATM ● IEEE 802.2 – Logical Link Control ● SDH ● Token Bus (historical) ● Network Infrastructure ● Token Ring (historical) ● Virtual LANs ● Fiber Distributed Data Interface ● Structured Cabling Univ.-Prof. Dr.-Ing. Jochen H. Schiller ▪ cst.mi.fu-berlin.de ▪ Telematics ▪ Chapter 5: Medium Access Control Sublayer 5.2 Design Issues Univ.-Prof. Dr.-Ing. Jochen H. Schiller ▪ cst.mi.fu-berlin.de ▪ Telematics ▪ Chapter 5: Medium Access Control Sublayer 5.3 Design Issues ● Two kinds of connections in networks ● Point-to-point connections OSI Reference Model ● Broadcast (Multi-access channel, Application Layer Random access channel) Presentation Layer ● In a network with broadcast Session Layer connections ● Who gets the channel? Transport Layer Network Layer ● Protocols used to determine who gets next access to the channel Data Link Layer ● Medium Access Control (MAC) sublayer Physical Layer Univ.-Prof. Dr.-Ing. Jochen H. Schiller ▪ cst.mi.fu-berlin.de ▪ Telematics ▪ Chapter 5: Medium Access Control Sublayer 5.4 Network Types for the Local Range ● LLC layer: uniform interface and same frame format to upper layers ● MAC layer: defines medium access .. -
On-Demand Routing in Multi-Hop Wireless Mobile Ad Hoc Networks
Available Online at www.ijcsmc.com International Journal of Computer Science and Mobile Computing A Monthly Journal of Computer Science and Information Technology ISSN 2320–088X IJCSMC, Vol. 2, Issue. 7, July 2013, pg.317 – 321 RESEARCH ARTICLE ON-DEMAND ROUTING IN MULTI-HOP WIRELESS MOBILE AD HOC NETWORKS P. Umamaheswari 1, K. Ranjith singh 2 1Periyar University, TamilNadu, India 2Professor of PGP College, TamilNadu, India 1 [email protected]; 2 [email protected] Abstract— An ad hoc network is a collection of wireless mobile nodes dynamically forming a temporary network without the use of any preexisting network infrastructure or centralized administration. Routing protocols used in ad hoc networks must automatically adjust to environments that can vary between the extremes of high mobility with low bandwidth, and low mobility with high bandwidth. This thesis argues that such protocols must operate in an on-demand fashion and that they must carefully limit the number of nodes required to react to a given topology change in the network. I have embodied these two principles in a routing protocol called Dynamic Source Routing (DSR). As a result of its unique design, the protocol adapts quickly to routing changes when node movement is frequent, yet requires little or no overhead during periods in which nodes move less frequently. By presenting a detailed analysis of DSR’s behavior in a variety of situations, this thesis generalizes the lessons learned from DSR so that they can be applied to the many other new routing protocols that have adopted the basic DSR framework. The thesis proves the practicality of the DSR protocol through performance results collected from a full-scale 8 node tested, and it demonstrates several methodologies for experimenting with protocols and applications in an ad hoc network environment, including the emulation of ad hoc networks. -
ECE 158A: Lecture 13
ECE 158A: Lecture 13 Fall 2015 Random Access and Ethernet! Random Access! Basic idea: Exploit statistical multiplexing Do not avoid collisions, just recover from them When a node has packet to send Transmit at full channel data rate No a priori coordination among nodes Two or more transmitting nodes ⇒ collision Random access MAC protocol specifies: How to detect collisions How to recover from collisions Key Ideas of Random Access Carrier sense Listen before speaking, and don’t interrupt Check if someone else is already sending data and wait till the other node is done Collision detection If someone else starts talking at the same time, stop Realize when two nodes are transmitting at once by detecting that the data on the wire is garbled Randomness Don’t start talking again right away Wait for a random time before trying again Aloha net (70’s) First random access network Setup by Norm Abramson at the University of Hawaii First data communication system for Hawaiian islands Hub at University of Hawaii, Oahu Alohanet had two radio channels: Random access: Sites sending data Broadcast: Hub rebroadcasting data Aloha Signaling Two channels: random access, broadcast Sites send packets to hub (random) If received, hub sends ACK (random) If not received (collision), site resends Hub sends packets to all sites (broadcast) Sites can receive even if they are also sending Questions: When do you resend? Resend with probability p How does this perform? Will analyze in class, stay tuned…. Slot-by-slot Aloha Example -

Examining Ambiguities in the Automatic Packet Reporting System
Examining Ambiguities in the Automatic Packet Reporting System A Thesis Presented to the Faculty of California Polytechnic State University San Luis Obispo In Partial Fulfillment of the Requirements for the Degree Master of Science in Electrical Engineering by Kenneth W. Finnegan December 2014 © 2014 Kenneth W. Finnegan ALL RIGHTS RESERVED ii COMMITTEE MEMBERSHIP TITLE: Examining Ambiguities in the Automatic Packet Reporting System AUTHOR: Kenneth W. Finnegan DATE SUBMITTED: December 2014 REVISION: 1.2 COMMITTEE CHAIR: Bridget Benson, Ph.D. Assistant Professor, Electrical Engineering COMMITTEE MEMBER: John Bellardo, Ph.D. Associate Professor, Computer Science COMMITTEE MEMBER: Dennis Derickson, Ph.D. Department Chair, Electrical Engineering iii ABSTRACT Examining Ambiguities in the Automatic Packet Reporting System Kenneth W. Finnegan The Automatic Packet Reporting System (APRS) is an amateur radio packet network that has evolved over the last several decades in tandem with, and then arguably beyond, the lifetime of other VHF/UHF amateur packet networks, to the point where it is one of very few packet networks left on the amateur VHF/UHF bands. This is proving to be problematic due to the loss of institutional knowledge as older amateur radio operators who designed and built APRS and other AX.25-based packet networks abandon the hobby or pass away. The purpose of this document is to collect and curate a sufficient body of knowledge to ensure the continued usefulness of the APRS network, and re-examining the engineering decisions made during the network's evolution to look for possible improvements and identify deficiencies in documentation of the existing network. iv TABLE OF CONTENTS List of Figures vii 1 Preface 1 2 Introduction 3 2.1 History of APRS . -

6.02 Notes, Chapter 15: Sharing a Channel: Media Access (MAC
MIT 6.02 DRAFT Lecture Notes Last update: November 3, 2012 CHAPTER 15 Sharing a Channel: Media Access (MAC) Protocols There are many communication channels, including radio and acoustic channels, and certain kinds of wired links (coaxial cables), where multiple nodes can all be connected and hear each other’s transmissions (either perfectly or with some non-zero probability). This chapter addresses the fundamental question of how such a common communication channel—also called a shared medium—can be shared between the different nodes. There are two fundamental ways of sharing such channels (or media): time sharing and frequency sharing.1 The idea in time sharing is to have the nodes coordinate with each other to divide up the access to the medium one at a time, in some fashion. The idea in frequency sharing is to divide up the frequency range available between the different transmitting nodes in a way that there is little or no interference between concurrently transmitting nodes. The methods used here are the same as in frequency division multiplexing, which we described in the previous chapter. This chapter focuses on time sharing. We will investigate two common ways: time division multiple access,orTDMA , and contention protocols. Both approaches are used in networks today. These schemes for time and frequency sharing are usually implemented as communica tion protocols. The term protocol refers to the rules that govern what each node is allowed to do and how it should operate. Protocols capture the “rules of engagement” that nodes must follow, so that they can collectively obtain good performance. -
Sistemas Informáticos Curso 2005-06 Sistema De Autoconfiguración Para
Sistemas Informáticos Curso 2005-06 Sistema de Autoconfiguración para Redes Ad Hoc Miguel Ángel Tolosa Diosdado Adam Ameziane Dirigido por: Profª. Marta López Fernández Dpto. Sistemas Informáticos y Programación Grupo de Análisis, Seguridad y Sistemas (GASS) Facultad de Informática Universidad Complutense de Madrid AGRADECIMIENTOS: Queremos agradecer la dedicación de la profesora Marta López Fernández, Directora del presente Proyecto de Sistemas Informáticos, y del resto de integrantes del Grupo de Análisis, Seguridad y Sistemas (GASS) del Departamento de Sistemas Informáticos y Programación de la Universidad Complutense de Madrid, y de forma muy especial a Fabio Mesquita Buiati y a Javier García Villalba, Miembro y Director del citado Grupo, respectivamente, por el asesoramiento y las facilidades proporcionadas para el buen término de este Proyecto. 2 Índice RESUMEN ....................................................................................................................... 5 ABSTRACT ..................................................................................................................... 6 PALABRAS CLAVE....................................................................................................... 7 1-INTRODUCCIÓN....................................................................................................... 8 1.1- MOTIVACIÓN ......................................................................................................... 8 1.2 – OBJETIVO ............................................................................................................. -

Ethernet: an Engineering Paradigm
Ethernet: An Engineering Paradigm Mark Huang Eden Miller Peter Sun Charles Oji 6.933J/STS.420J Structure, Practice, and Innovation in EE/CS Fall 1998 1.0 Acknowledgements 1 2.0 A Model for Engineering 1 2.1 The Engineering Paradigm 3 2.1.1 Concept 5 2.1.2 Standard 6 2.1.3 Implementation 6 3.0 Phase I: Conceptualization and Early Implementation 7 3.1 Historical Framework: Definition of the Old Paradigm 7 3.1.1 Time-sharing 8 3.1.2 WANs: ARPAnet and ALOHAnet 8 3.2 Anomalies: Definition of the Crisis 10 3.2.1 From Mainframes to Minicomputers: A Parallel Paradigm Shift 10 3.2.2 From WAN to LAN 11 3.2.3 Xerox: From Xerography to Office Automation 11 3.2.4 Metcalfe and Boggs: Professional Crisis 12 3.3 Ethernet: The New Paradigm 13 3.3.1 Invention Background 14 3.3.2 Basic Technical Description 15 3.3.3 How Ethernet Addresses the Crisis 15 4.0 Phase II: Standardization 17 4.1 Crisis II: Building Vendor Support (1978-1983) 17 4.1.1 Forming the DIX Consortium 18 4.1.2 Within DEC 19 4.1.3 Within Intel 22 4.1.4 The Marketplace 23 4.2 Crisis III: Establishing Widespread Compatibility (1979-1984) 25 4.3 The Committee 26 5.0 Implementation and the Crisis of Domination 28 5.1 The Game of Growth 28 5.2 The Grindley Effect in Action 28 5.3 The Rise of 3Com, a Networking Giant 29 6.0 Conclusion 30 A.0 References A-1 i of ii ii of ii December 11, 1998 Ethernet: An Engineering Paradigm Mark Huang Eden Miller Charles Oji Peter Sun 6.933J/STS.420J Structure, Practice, and Innovation in EE/CS Fall 1998 1.0 Acknowledgements The authors would like to thank the following individuals for contributing to this project. -

Ad Hoc Networks – Design and Performance Issues
HELSINKI UNIVERSITY OF TECHNOLOGY Department of Electrical and Communications Engineering Networking Laboratory UNIVERSIDAD POLITECNICA´ DE MADRID E.T.S.I. Telecomunicaciones Juan Francisco Redondo Ant´on Ad Hoc Networks – design and performance issues Thesis submitted in partial fulfillment of the requirements for the degree of Master of Science in Telecommunications Engineering Espoo, May 2002 Supervisor: Professor Jorma Virtamo Abstract of Master’s Thesis Author: Juan Francisco Redondo Ant´on Thesis Title: Ad hoc networks – design and performance issues Date: May the 28th, 2002 Number of pages: 121 Faculty: Helsinki University of Technology Department: Department of Electrical and Communications Engineering Professorship: S.38 – Networking Laboratory Supervisor: Professor Jorma Virtamo The fast development wireless networks have been experiencing recently offers a set of different possibilities for mobile users, that are bringing us closer to voice and data communications “anytime and anywhere”. Some outstanding solutions in this field are Wireless Local Area Networks, that offer high-speed data rate in small areas, and Wireless Wide Area Networks, that allow a greater mobility for users. In some situations, like in military environment and emergency and rescue operations, the necessity of establishing dynamic communications with no reliance on any kind of infrastructure is essential. Then, the ease of quick deployment ad hoc networks provide becomes of great usefulness. Ad hoc networks are formed by mobile hosts that cooperate with each other in a distributed way for the transmissions of packets over wireless links, their routing, and to manage the network itself. Their features condition their design in several network layers, so that parameters like bandwidth or energy consumption, that appear critical in a multi-layer design, must be carefully taken into account. -

Alohanet: World’S First Wireless Network
Wiliki_Dec2020_Wiliki Sept06 11/24/20 6:54 AM Page 1 VOL. 56 NO. 10 SERVING 2000 ENGINEERS DECEMBER, 2020 ALOHAnet: World’s First Wireless Network Dr. Franklin Kuo and Dr. Norman Abramson attended the Milestone ceremony virtually. On October 13, 2020, Hawaii celebrated the An excerpt from Dr. Vinton Cerf, Google’s chief o Comprised of the ALOHA protocol and the installation of its fourth IEEE Milestone (for the internet evangelist and “Father of the Internet”: ALOHA System. ALOHAnet) with the world. “The University of Hawai’i is the gift that keeps o Acronym for "Additive Links On-line Hawaii Hawaii established a significant first with this on giving, and it has been giving for 50 years and Area network". celebration: The first IEEE Milestone to be more,” Cerf said. “We benefit from that. Imagine Prior to the ALOHA protocol, there was no virtually broadcast worldwide due to the COVID- the industries that have grown up around people existing packet-switching or packet-based 19 pandemic. who have learned skills from the University of protocols. This is the reason that Bob Metcalfe IEEE established the Electrical Engineering Hawaiʻi.” came to the University of Hawaii College of Milestones program in 1983 to honor significant Peer recognition of ALOHAnet and its co- Engineering to study under Dr. Norman achievements in the history of electrical and Principal Investigators, Dr. Norman Abramson Abramson. electronics engineering. and Dr. Franklin Kuo during the Virtual Prior to the ALOHA system, mainframe Due to the COVID-19 pandemic, the University Installation Ceremony included: computers (PCs were at least a decade away) of Hawaii at Manoa College of Engineering • Dr.