Patterns, Symmetries, and Mathematical Structures in the Arts Sarah C
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

In Order for the Figure to Map Onto Itself, the Line of Reflection Must Go Through the Center Point
3-5 Symmetry State whether the figure appears to have line symmetry. Write yes or no. If so, copy the figure, draw all lines of symmetry, and state their number. 1. SOLUTION: A figure has reflectional symmetry if the figure can be mapped onto itself by a reflection in a line. The figure has reflectional symmetry. In order for the figure to map onto itself, the line of reflection must go through the center point. Two lines of reflection go through the sides of the figure. Two lines of reflection go through the vertices of the figure. Thus, there are four possible lines that go through the center and are lines of reflections. Therefore, the figure has four lines of symmetry. eSolutionsANSWER: Manual - Powered by Cognero Page 1 yes; 4 2. SOLUTION: A figure has reflectional symmetry if the figure can be mapped onto itself by a reflection in a line. The given figure does not have reflectional symmetry. There is no way to fold or reflect it onto itself. ANSWER: no 3. SOLUTION: A figure has reflectional symmetry if the figure can be mapped onto itself by a reflection in a line. The given figure has reflectional symmetry. The figure has a vertical line of symmetry. It does not have a horizontal line of symmetry. The figure does not have a line of symmetry through the vertices. Thus, the figure has only one line of symmetry. ANSWER: yes; 1 State whether the figure has rotational symmetry. Write yes or no. If so, copy the figure, locate the center of symmetry, and state the order and magnitude of symmetry. -

An Artistic and Mathematical Look at the Work of Maurits Cornelis Escher
University of Northern Iowa UNI ScholarWorks Honors Program Theses Honors Program 2016 Tessellations: An artistic and mathematical look at the work of Maurits Cornelis Escher Emily E. Bachmeier University of Northern Iowa Let us know how access to this document benefits ouy Copyright ©2016 Emily E. Bachmeier Follow this and additional works at: https://scholarworks.uni.edu/hpt Part of the Harmonic Analysis and Representation Commons Recommended Citation Bachmeier, Emily E., "Tessellations: An artistic and mathematical look at the work of Maurits Cornelis Escher" (2016). Honors Program Theses. 204. https://scholarworks.uni.edu/hpt/204 This Open Access Honors Program Thesis is brought to you for free and open access by the Honors Program at UNI ScholarWorks. It has been accepted for inclusion in Honors Program Theses by an authorized administrator of UNI ScholarWorks. For more information, please contact [email protected]. Running head: TESSELLATIONS: THE WORK OF MAURITS CORNELIS ESCHER TESSELLATIONS: AN ARTISTIC AND MATHEMATICAL LOOK AT THE WORK OF MAURITS CORNELIS ESCHER A Thesis Submitted in Partial Fulfillment of the Requirements for the Designation University Honors Emily E. Bachmeier University of Northern Iowa May 2016 TESSELLATIONS : THE WORK OF MAURITS CORNELIS ESCHER This Study by: Emily Bachmeier Entitled: Tessellations: An Artistic and Mathematical Look at the Work of Maurits Cornelis Escher has been approved as meeting the thesis or project requirements for the Designation University Honors. ___________ ______________________________________________________________ Date Dr. Catherine Miller, Honors Thesis Advisor, Math Department ___________ ______________________________________________________________ Date Dr. Jessica Moon, Director, University Honors Program TESSELLATIONS : THE WORK OF MAURITS CORNELIS ESCHER 1 Introduction I first became interested in tessellations when my fifth grade mathematics teacher placed multiple shapes that would tessellate at the front of the room and we were allowed to pick one to use to create a tessellation. -

The Creative Act in the Dialogue Between Art and Mathematics
mathematics Article The Creative Act in the Dialogue between Art and Mathematics Andrés F. Arias-Alfonso 1,* and Camilo A. Franco 2,* 1 Facultad de Ciencias Sociales y Humanas, Universidad de Manizales, Manizales 170003, Colombia 2 Grupo de Investigación en Fenómenos de Superficie—Michael Polanyi, Departamento de Procesos y Energía, Facultad de Minas, Universidad Nacional de Colombia, Sede Medellín, Medellín 050034, Colombia * Correspondence: [email protected] (A.F.A.-A.); [email protected] (C.A.F.) Abstract: This study was developed during 2018 and 2019, with 10th- and 11th-grade students from the Jose Maria Obando High School (Fredonia, Antioquia, Colombia) as the target population. Here, the “art as a method” was proposed, in which, after a diagnostic, three moments were developed to establish a dialogue between art and mathematics. The moments include Moment 1: introduction to art and mathematics as ways of doing art, Moment 2: collective experimentation, and Moment 3: re-signification of education as a model of experience. The methodology was derived from different mathematical-based theories, such as pendulum motion, centrifugal force, solar energy, and Chladni plates, allowing for the exploration of possibilities to new paths of knowledge from proposing the creative act. Likewise, the possibility of generating a broad vision of reality arose from the creative act, where understanding was reached from logical-emotional perspectives beyond the rational vision of science and its descriptions. Keywords: art; art as method; creative act; mathematics 1. Introduction Citation: Arias-Alfonso, A.F.; Franco, C.A. The Creative Act in the Dialogue There has always been a conception in the collective imagination concerning the between Art and Mathematics. -

The Cubic Groups
The Cubic Groups Baccalaureate Thesis in Electrical Engineering Author: Supervisor: Sana Zunic Dr. Wolfgang Herfort 0627758 Vienna University of Technology May 13, 2010 Contents 1 Concepts from Algebra 4 1.1 Groups . 4 1.2 Subgroups . 4 1.3 Actions . 5 2 Concepts from Crystallography 6 2.1 Space Groups and their Classification . 6 2.2 Motions in R3 ............................. 8 2.3 Cubic Lattices . 9 2.4 Space Groups with a Cubic Lattice . 10 3 The Octahedral Symmetry Groups 11 3.1 The Elements of O and Oh ..................... 11 3.2 A Presentation of Oh ......................... 14 3.3 The Subgroups of Oh ......................... 14 2 Abstract After introducing basics from (mathematical) crystallography we turn to the description of the octahedral symmetry groups { the symmetry group(s) of a cube. Preface The intention of this account is to provide a description of the octahedral sym- metry groups { symmetry group(s) of the cube. We first give the basic idea (without proofs) of mathematical crystallography, namely that the 219 space groups correspond to the 7 crystal systems. After this we come to describing cubic lattices { such ones that are built from \cubic cells". Finally, among the cubic lattices, we discuss briefly the ones on which O and Oh act. After this we provide lists of the elements and the subgroups of Oh. A presentation of Oh in terms of generators and relations { using the Dynkin diagram B3 is also given. It is our hope that this account is accessible to both { the mathematician and the engineer. The picture on the title page reflects Ha¨uy'sidea of crystal structure [4]. -

The Age of Addiction David T. Courtwright Belknap (2019) Opioids
The Age of Addiction David T. Courtwright Belknap (2019) Opioids, processed foods, social-media apps: we navigate an addictive environment rife with products that target neural pathways involved in emotion and appetite. In this incisive medical history, David Courtwright traces the evolution of “limbic capitalism” from prehistory. Meshing psychology, culture, socio-economics and urbanization, it’s a story deeply entangled in slavery, corruption and profiteering. Although reform has proved complex, Courtwright posits a solution: an alliance of progressives and traditionalists aimed at combating excess through policy, taxation and public education. Cosmological Koans Anthony Aguirre W. W. Norton (2019) Cosmologist Anthony Aguirre explores the nature of the physical Universe through an intriguing medium — the koan, that paradoxical riddle of Zen Buddhist teaching. Aguirre uses the approach playfully, to explore the “strange hinterland” between the realities of cosmic structure and our individual perception of them. But whereas his discussions of time, space, motion, forces and the quantum are eloquent, the addition of a second framing device — a fictional journey from Enlightenment Italy to China — often obscures rather than clarifies these chewy cosmological concepts and theories. Vanishing Fish Daniel Pauly Greystone (2019) In 1995, marine biologist Daniel Pauly coined the term ‘shifting baselines’ to describe perceptions of environmental degradation: what is viewed as pristine today would strike our ancestors as damaged. In these trenchant essays, Pauly trains that lens on fisheries, revealing a global ‘aquacalypse’. A “toxic triad” of under-reported catches, overfishing and deflected blame drives the crisis, he argues, complicated by issues such as the fishmeal industry, which absorbs a quarter of the global catch. -

Mathematics K Through 6
Building fun and creativity into standards-based learning Mathematics K through 6 Ron De Long, M.Ed. Janet B. McCracken, M.Ed. Elizabeth Willett, M.Ed. © 2007 Crayola, LLC Easton, PA 18044-0431 Acknowledgements Table of Contents This guide and the entire Crayola® Dream-Makers® series would not be possible without the expertise and tireless efforts Crayola Dream-Makers: Catalyst for Creativity! ....... 4 of Ron De Long, Jan McCracken, and Elizabeth Willett. Your passion for children, the arts, and creativity are inspiring. Thank you. Special thanks also to Alison Panik for her content-area expertise, writing, research, and curriculum develop- Lessons ment of this guide. Garden of Colorful Counting ....................................... 6 Set representation Crayola also gratefully acknowledges the teachers and students who tested the lessons in this guide: In the Face of Symmetry .............................................. 10 Analysis of symmetry Barbi Bailey-Smith, Little River Elementary School, Durham, NC Gee’s-o-metric Wisdom ................................................ 14 Geometric modeling Rob Bartoch, Sandy Plains Elementary School, Baltimore, MD Patterns of Love Beads ................................................. 18 Algebraic patterns Susan Bivona, Mount Prospect Elementary School, Basking Ridge, NJ A Bountiful Table—Fair-Share Fractions ...................... 22 Fractions Jennifer Braun, Oak Street Elementary School, Basking Ridge, NJ Barbara Calvo, Ocean Township Elementary School, Oakhurst, NJ Whimsical Charting and -

Chapter 1 – Symmetry of Molecules – P. 1
Chapter 1 – Symmetry of Molecules – p. 1 - 1. Symmetry of Molecules 1.1 Symmetry Elements · Symmetry operation: Operation that transforms a molecule to an equivalent position and orientation, i.e. after the operation every point of the molecule is coincident with an equivalent point. · Symmetry element: Geometrical entity (line, plane or point) which respect to which one or more symmetry operations can be carried out. In molecules there are only four types of symmetry elements or operations: · Mirror planes: reflection with respect to plane; notation: s · Center of inversion: inversion of all atom positions with respect to inversion center, notation i · Proper axis: Rotation by 2p/n with respect to the axis, notation Cn · Improper axis: Rotation by 2p/n with respect to the axis, followed by reflection with respect to plane, perpendicular to axis, notation Sn Formally, this classification can be further simplified by expressing the inversion i as an improper rotation S2 and the reflection s as an improper rotation S1. Thus, the only symmetry elements in molecules are Cn and Sn. Important: Successive execution of two symmetry operation corresponds to another symmetry operation of the molecule. In order to make this statement a general rule, we require one more symmetry operation, the identity E. (1.1: Symmetry elements in CH4, successive execution of symmetry operations) 1.2. Systematic classification by symmetry groups According to their inherent symmetry elements, molecules can be classified systematically in so called symmetry groups. We use the so-called Schönfliess notation to name the groups, Chapter 1 – Symmetry of Molecules – p. 2 - which is the usual notation for molecules. -

Mathematical Concepts Within the Artwork of Lewitt and Escher
A Thesis Presented to The Faculty of Alfred University More than Visual: Mathematical Concepts Within the Artwork of LeWitt and Escher by Kelsey Bennett In Partial Fulfillment of the requirements for the Alfred University Honors Program May 9, 2019 Under the Supervision of: Chair: Dr. Amanda Taylor Committee Members: Barbara Lattanzi John Hosford 1 Abstract The goal of this thesis is to demonstrate the relationship between mathematics and art. To do so, I have explored the work of two artists, M.C. Escher and Sol LeWitt. Though these artists approached the role of mathematics in their art in different ways, I have observed that each has employed mathematical concepts in order to create their rule-based artworks. The mathematical ideas which serve as the backbone of this thesis are illustrated by the artists' works and strengthen the bond be- tween the two subjects of art and math. My intention is to make these concepts accessible to all readers, regardless of their mathematical or artis- tic background, so that they may in turn gain a deeper understanding of the relationship between mathematics and art. To do so, we begin with a philosophical discussion of art and mathematics. Next, we will dissect and analyze various pieces of work by Sol LeWitt and M.C. Escher. As part of that process, we will also redesign or re-imagine some artistic pieces to further highlight mathematical concepts at play within the work of these artists. 1 Introduction What is art? The Merriam-Webster dictionary provides one definition of art as being \the conscious use of skill and creative imagination especially in the production of aesthetic object" ([1]). -

Music: Broken Symmetry, Geometry, and Complexity Gary W
Music: Broken Symmetry, Geometry, and Complexity Gary W. Don, Karyn K. Muir, Gordon B. Volk, James S. Walker he relation between mathematics and Melody contains both pitch and rhythm. Is • music has a long and rich history, in- it possible to objectively describe their con- cluding: Pythagorean harmonic theory, nection? fundamentals and overtones, frequency Is it possible to objectively describe the com- • Tand pitch, and mathematical group the- plexity of musical rhythm? ory in musical scores [7, 47, 56, 15]. This article In discussing these and other questions, we shall is part of a special issue on the theme of math- outline the mathematical methods we use and ematics, creativity, and the arts. We shall explore provide some illustrative examples from a wide some of the ways that mathematics can aid in variety of music. creativity and understanding artistic expression The paper is organized as follows. We first sum- in the realm of the musical arts. In particular, we marize the mathematical method of Gabor trans- hope to provide some intriguing new insights on forms (also known as short-time Fourier trans- such questions as: forms, or spectrograms). This summary empha- sizes the use of a discrete Gabor frame to perform Does Louis Armstrong’s voice sound like his • the analysis. The section that follows illustrates trumpet? the value of spectrograms in providing objec- What do Ludwig van Beethoven, Ben- • tive descriptions of musical performance and the ny Goodman, and Jimi Hendrix have in geometric time-frequency structure of recorded common? musical sound. Our examples cover a wide range How does the brain fool us sometimes • of musical genres and interpretation styles, in- when listening to music? And how have cluding: Pavarotti singing an aria by Puccini [17], composers used such illusions? the 1982 Atlanta Symphony Orchestra recording How can mathematics help us create new of Copland’s Appalachian Spring symphony [5], • music? the 1950 Louis Armstrong recording of “La Vie en Rose” [64], the 1970 rock music introduction to Gary W. -

Muse® Teacher Guide: January 2020
Muse® Teacher Guide: September 2020 What Is Perfection? It may be a relief to discover that being “imperfect” has some advantages. This issue of MUSE explores how variation and diversity contribute to excellence. In a world where we are compelled to strive for excellence, the articles in this guide examine why the journey, rather than the destination, should be our primary focus. CONVERSATION QUESTION When can imperfection be extraordinary? TEACHING OBJECTIVES • Students will learn about the use of the golden In addition to supplemental materials ratio in art. • Students will learn why game developers avoid focused on core STEM skills, this perfection. flexible teaching tool offers • Students will learn how variations in biology can be the key to excellence. vocabulary-building activities, • Students will investigate number patterns utilizing questions for discussion, and cross- the Fibonacci sequence. • Students will compare and contrast the elements curricular activities. of a wide game with the elements of a deep game. • Students will examine the structure and function SELECTIONS of variations in the human body that contribute to • The Art of the Golden Ratio the extraordinary functioning. Expository Nonfiction, ~900L • Students will research examples of the golden • Good Gaming ratio in art history. Expository Nonfiction, ~1100L • Students will use mathematical concepts to express game preferences. • Perfectly Imperfect • Students will study additional examples of Expository Nonfiction, ~700L adaptation in the animal kingdom. U33T http://www.cricketmedia.com/classroom/Muse-magazine Muse® Teacher Guide: September 2020 The Art of the Golden Ratio ENGAGE pp. 20–22, Expository Nonfiction Conversation Question: When can imperfection be extraordinary? This article explores the use of mathematical concepts in art. -

Pose Estimation for Objects with Rotational Symmetry
Pose Estimation for Objects with Rotational Symmetry Enric Corona, Kaustav Kundu, Sanja Fidler Abstract— Pose estimation is a widely explored problem, enabling many robotic tasks such as grasping and manipulation. In this paper, we tackle the problem of pose estimation for objects that exhibit rotational symmetry, which are common in man-made and industrial environments. In particular, our aim is to infer poses for objects not seen at training time, but for which their 3D CAD models are available at test time. Previous X 2 X 1 X 2 X 1 work has tackled this problem by learning to compare captured Y ∼ 2 Y ∼ 2 Y ∼ 2 Y ∼ 2 views of real objects with the rendered views of their 3D CAD Z ∼ 6 Z ∼ 1 Z ∼ Z ∼ 1 ∼ ∼ ∼ ∞ ∼ models, by embedding them in a joint latent space using neural Fig. 1. Many industrial objects such as various tools exhibit rotational networks. We show that sidestepping the issue of symmetry symmetries. In our work, we address pose estimation for such objects. in this scenario during training leads to poor performance at test time. We propose a model that reasons about rotational symmetry during training by having access to only a small set of that this is not a trivial task, as the rendered views may look symmetry-labeled objects, whereby exploiting a large collection very different from objects in real images, both because of of unlabeled CAD models. We demonstrate that our approach different background, lighting, and possible occlusion that significantly outperforms a naively trained neural network on arise in real scenes. -
12-5 Worksheet Part C
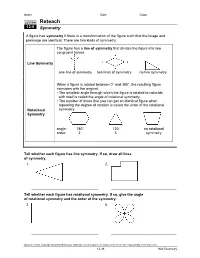
Name ________________________________________ Date __________________ Class__________________ LESSON Reteach 12-5 Symmetry A figure has symmetry if there is a transformation of the figure such that the image and preimage are identical. There are two kinds of symmetry. The figure has a line of symmetry that divides the figure into two congruent halves. Line Symmetry one line of symmetry two lines of symmetry no line symmetry When a figure is rotated between 0° and 360°, the resulting figure coincides with the original. • The smallest angle through which the figure is rotated to coincide with itself is called the angle of rotational symmetry. • The number of times that you can get an identical figure when repeating the degree of rotation is called the order of the rotational Rotational symmetry. Symmetry angle: 180° 120° no rotational order: 2 3 symmetry Tell whether each figure has line symmetry. If so, draw all lines of symmetry. 1. 2. _________________________________________ ________________________________________ Tell whether each figure has rotational symmetry. If so, give the angle of rotational symmetry and the order of the symmetry. 3. 4. _________________________________________ ________________________________________ Original content Copyright © by Holt McDougal. Additions and changes to the original content are the responsibility of the instructor. 12-38 Holt Geometry Name ________________________________________ Date __________________ Class__________________ LESSON Reteach 12-5 Symmetry continued Three-dimensional figures can also have symmetry. Symmetry in Three Description Example Dimensions A plane can divide a figure into two Plane Symmetry congruent halves. There is a line about which a figure Symmetry About can be rotated so that the image and an Axis preimage are identical.