M68000 8-16-32-Bit Microprocessors User's Manual
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

12 Questions To... Natami Team - Part 1
12 questions to... Natami Team - part 1 Banter (c) Polski Portal Amigowy (www.ppa.pl) Today I will tell you about something unique. I will present you the latest 68k CPU! You may wonder... What actually is N68050? The N68050 (N050) is a new 68k family processor developed by the Natami Team. It runs inside the FPGA together with the Natami chipset. The 050 is the first revision of our 68k CPU architecture. Further on, we will extend the architecture to the N68050E and later the N68070 specification. The N68050 softcore will be the default CPU of the Natami system. But if the user wants to, he could also get a separate CPU card with a physical 68060 for his Natami system, connected to the mainboard over the SyncZorro bus. The development history of the N68050 core. One could say it started in 1998, when Gunnar tried to write his first 68k softcore. But FPGAs were unfortunately too small to accomplish this task back then. The actual development of the Natami softcore started two years ago, after we dismissed Coldfire as a possible CPU for the Natami. Coldfire was interesting, but our testing and estimates showed us that solving it with our own softcore is even better. The first "N68070" softcore design idea was similar to a crossbreed of 68000 and Coldfire. Our first concept was to use a pipeline similar to the Coldfire V3 pipeline. To improve performance we changed this and reworked the pipeline to be longer. Our goal for the softcore was to reach a higher clockrate and to be in all regards better than the original Motorola 68060 clocked at the same speed. -
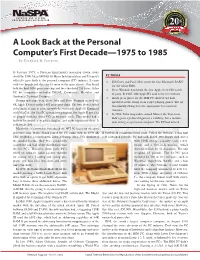
A Look Back at the Personal Computer's First Decade—1975 To
PROFE MS SSI E ON ST A Y L S S D A N S A S O K C R I A O thth T I W O T N E N 20 A Look Back at the Personal Computer’s First Decade—1975 to 1985 By Elizabeth M. Ferrarini IN JANUARY 1975, A POPULAR ELECTRONICS MAGAZINE COVER STORY about the $300 Altair 8800 kit by Micro Instrumentation and Telemetry PC TRIVIA officially gave birth to the personal computer (PC) industry. It came ▼ Bill Gates and Paul Allen wrote the first Microsoft BASIC with two boards and slots for 16 more in the open chassis. One board for the Altair 8800. held the Intel 8080 processor chip and the other held 256 bytes. Other ▼ Steve Wozniak hand-built the first Apple from $20 worth PC kit companies included IMSAI, Cromemco, Heathkit, and of parts. In 1985, 200 Apple II's sold every five minutes. Southwest Technical Products. ▼ Initial press photo for the IBM PC showed two kids During that same year, Steve Jobs and Steve Wozniak created the sprawled on the living room carpet playing games. The ad 4K Apple I based on the 6502 processor chips. The two Steves added was quickly changed to one appropriate for corporate color and redesign to come up with the venerable Apple II. Equipped America. with VisiCalc, the first PC spreadsheet program, the Apple II got a lot ▼ In 1982, Time magazine's annual Man of the Year cover of people thinking about PCs as business tools. This model had a didn't go to a political figure or a celebrity, but a faceless built-in keyboard, a graphics display, and eight expansion slots. -

Lecture 1: Course Introduction G Course Organization G Historical Overview G Computer Organization G Why the MC68000? G Why Assembly Language?
Lecture 1: Course introduction g Course organization g Historical overview g Computer organization g Why the MC68000? g Why assembly language? Microprocessor-based System Design 1 Ricardo Gutierrez-Osuna Wright State University Course organization g Grading Instructor n Exams Ricardo Gutierrez-Osuna g 1 midterm and 1 final Office: 401 Russ n Homework Tel:775-5120 g 4 problem sets (not graded) [email protected] n Quizzes http://www.cs.wright.edu/~rgutier g Biweekly Office hours: TBA n Laboratories g 5 Labs Teaching Assistant g Grading scheme Mohammed Tabrez Office: 339 Russ [email protected] Weight (%) Office hours: TBA Quizes 20 Laboratory 40 Midterm 20 Final Exam 20 Microprocessor-based System Design 2 Ricardo Gutierrez-Osuna Wright State University Course outline g Module I: Programming (8 lectures) g MC68000 architecture (2) g Assembly language (5) n Instruction and addressing modes (2) n Program control (1) n Subroutines (2) g C language (1) g Module II: Peripherals (9) g Exception processing (1) g Devices (6) n PI/T timer (2) n PI/T parallel port (2) n DUART serial port (1) g Memory and I/O interface (1) g Address decoding (2) Microprocessor-based System Design 3 Ricardo Gutierrez-Osuna Wright State University Brief history of computers GENERATION FEATURES MILESTONES YEAR NOTES Asia Minor, Abacus 3000BC Only replaced by paper and pencil Mech., Blaise Pascal, Pascaline 1642 Decimal addition (8 decimal figs) Early machines Electro- Charles Babbage Differential Engine 1823 Steam powered (3000BC-1945) mech. Herman Hollerith, -

EMEA Arrow EMEA Design Partner Network Catalogue
EMEA Arrow EMEA Design Partner Network Catalogue [email protected] Engineering Solutions Center Expertise | Enablement | Support The mission of Arrow’s Engineering Solutions Center is to support the field team in their design activities ranging from NPI proposals, consultancy in complex areas like software, IoT, FPGAs, high-end to complete system concepts and Arrow’s ready-to-use solutions. Through the TestDrive board loan program, the ESC provides many supplier development boards and Arrow developed solutions to enable quick design starts. Design, customization, prototyping and certification services are available from Arrow’s comprehensive 3rd Party Network. 2 Editorial Dear Arrow Colleagues, A warm welcome to what I hope you will find to be a useful and informative first edition of the Arrow EMEA Design Partner Catalogue. To stay competitive, our customers must continuously leverage leading edge technologies while shortening design cycles. Further, the majority of today’s innovations are happening at the level of software, applications, sensing capabilities, connectivity and security. These dynamics require new skills and capabilities that our customers may lack. This is where the Arrow EMEA Design Partner Network can help. Our partners provide immediate access to pre-screened, Minimize design time qualified, and certified third-party design services companies. Arrow’s network of some of the best and speed time-to-market engineering design services companies can save your customers time and money and allow them to bring by enabling the Arrow products to market faster. Partners can support them EMEA Partner Network all the way from specification development to turnkey board design or be an extension to their engineering to get involved early in team. -
RTEMS CPU Supplement Documentation Release 4.11.3 ©Copyright 2016, RTEMS Project (Built 15Th February 2018)
RTEMS CPU Supplement Documentation Release 4.11.3 ©Copyright 2016, RTEMS Project (built 15th February 2018) CONTENTS I RTEMS CPU Architecture Supplement1 1 Preface 5 2 Port Specific Information7 2.1 CPU Model Dependent Features...........................8 2.1.1 CPU Model Name...............................8 2.1.2 Floating Point Unit..............................8 2.2 Multilibs........................................9 2.3 Calling Conventions.................................. 10 2.3.1 Calling Mechanism.............................. 10 2.3.2 Register Usage................................. 10 2.3.3 Parameter Passing............................... 10 2.3.4 User-Provided Routines............................ 10 2.4 Memory Model..................................... 11 2.4.1 Flat Memory Model.............................. 11 2.5 Interrupt Processing.................................. 12 2.5.1 Vectoring of an Interrupt Handler...................... 12 2.5.2 Interrupt Levels................................ 12 2.5.3 Disabling of Interrupts by RTEMS...................... 12 2.6 Default Fatal Error Processing............................. 14 2.7 Symmetric Multiprocessing.............................. 15 2.8 Thread-Local Storage................................. 16 2.9 CPU counter...................................... 17 2.10 Interrupt Profiling................................... 18 2.11 Board Support Packages................................ 19 2.11.1 System Reset................................. 19 3 ARM Specific Information 21 3.1 CPU Model Dependent Features.......................... -

A Manual for the Assemblerߤ Rob Pike Lucent Technologies, Bell Labs
A Manual for the Assembler Rob Pike Lucent Technologies, Bell Labs Machines There is an assembler for each of the MIPS, SPARC, Intel 386, ARM, PowerPC, Motorola 68010, and Motorola 68020. The 68020 assembler, 2a, is the oldest and in many ways the prototype. The assemblers are really just variations of a single program: they share many properties such as left-to-right assignment order for instruction operands and the synthesis of macro instructions such as MOVE to hide the peculiarities of the load and store structure of the machines. To keep things concrete, the first part of this manual is specifically about the 68020. At the end is a description of the differences among the other assemblers. Registers All pre-defined symbols in the assembler are upper-case. Data registers are R0 through R7; address registers are A0 through A7; floating-point registers are F0 through F7. A pointer in A6 is used by the C compiler to point to data, enabling short addresses to be used more often. The value of A6 is constant and must be set during C program initialization to the address of the externally-defined symbol a6base. The following hardware registers are defined in the assembler; their meaning should be obvious given a 68020 manual: CAAR, CACR, CCR, DFC, ISP, MSP, SFC, SR, USP, and VBR. The assembler also defines several pseudo-registers that manipulate the stack: FP, SP, and TOS. FP is the frame pointer, so 0(FP) is the first argument, 4(FP) is the second, and so on. SP is the local stack pointer, where automatic variables are held (SP is a pseudo-register only on the 68020); 0(SP) is the first automatic, and so on as with FP. -

Procesory Ve Směrovačích Firmy Cisco Motorola MPC857DSL
Procesory ve směrovačích firmy Cisco Pokročilé architektury počítačů Marek Malysz, mal341 Obsah Motorola MPC857DSL.............................................................................................................................1 Motorola 68360.........................................................................................................................................2 Motorola 68030.........................................................................................................................................3 Motorola MPC860 PowerQUICC............................................................................................................3 PMC-Sierra RM7061A.............................................................................................................................4 Broadcom BCM1250................................................................................................................................5 R4600.........................................................................................................................................................5 R5000.........................................................................................................................................................6 R7000.........................................................................................................................................................6 QuantumFlow Processor...........................................................................................................................6 -

Cyclone LC Programmers User Manual Purchase Agreement
Cyclone LC Programmers User Manual Purchase Agreement P&E Microcomputer Systems, Inc. reserves the right to make changes without further notice to any products herein to improve reliability, function, or design. P&E Microcomputer Systems, Inc. does not assume any liability arising out of the application or use of any product or circuit described herein. This software and accompanying documentation are protected by United States Copyright law and also by International Treaty provisions. Any use of this software in violation of copyright law or the terms of this agreement will be prosecuted. All the software described in this document is copyrighted by P&E Microcomputer Systems, Inc. Copyright notices have been included in the software. P&E Microcomputer Systems authorizes you to make archival copies of the software and documentation for the sole purpose of back-up and protecting your investment from loss. Under no circumstances may you copy this software or documentation for the purpose of distribution to others. Under no conditions may you remove the copyright notices from this software or documentation. This software may be used by one person on as many computers as that person uses, provided that the software is never used on two computers at the same time. P&E expects that group programming projects making use of this software will purchase a copy of the software and documentation for each user in the group. Contact P&E for volume discounts and site licensing agreements. P&E Microcomputer Systems does not assume any liability for the use of this software beyond the original purchase price of the software. -

From 128K to Quadra: Model by Model
Chapter 12 From 128K to Quadra: Model by Model IN THIS CHAPTER: I What the specs mean I The specs for every Mac model ever made I Secrets of the pre-PowerPC Mac models I Just how much your Mac has devalued Yes, we’ve already been told that we’re nuts to attempt the next two chapters of this book. Since 1984, Apple has created more than 140 different Mac models — including 35 different PowerBooks and 53 different Performas! Each year, Apple piles on another dozen or so new models. By the time you finish reading this page, another Performa model probably will have been born. So, writing a couple of chapters that are supposed to describe every model is an exercise in futility. But we’re going to attempt it anyway, taking the models one by one and tracking their speeds, specs, and life cycles. This chapter will cover all the Apple Macs — both desktop and portable models — from the birth of the original Macintosh 128K to the release of the PowerBook 190, the last Mac ever made that was based on Motorola’s 68000-series processor chip. When you’re finished reading this chapter, you will be one of the few people on Earth who actually knows the difference between a Performa 550, 560, 575, 577, 578, 580, and 588. 375 376 Part II: Secrets of the Machine Chapter 13 will cover every Power Mac — or, more accurately, every PowerPC-based machine (those with four-digit model numbers) — from the first ones released in 1994 to the models released just minutes before this book was printed. -

Instruction Manual TMS 204 68040, 68EC040 & 68LC040
Instruction Manual TMS 204 68040, 68EC040 & 68LC040 Microprocessor Support 070-9822-00 There are no current European directives that apply to this product. This product provides cable and test lead connections to a test object of electronic measuring and test equipment. Warning The servicing instructions are for use by qualified personnel only. To avoid personal injury, do not perform any servicing unless you are qualified to do so. Refer to all safety summaries prior to performing service. Copyright E Tektronix, Inc. All rights reserved. Licensed software products are owned by Tektronix or its suppliers and are protected by United States copyright laws and international treaty provisions. Use, duplication, or disclosure by the Government is subject to restrictions as set forth in subparagraph (c)(1)(ii) of the Rights in Technical Data and Computer Software clause at DFARS 252.227-7013, or subparagraphs (c)(1) and (2) of the Commercial Computer Software – Restricted Rights clause at FAR 52.227-19, as applicable. Tektronix products are covered by U.S. and foreign patents, issued and pending. Information in this publication supercedes that in all previously published material. Specifications and price change privileges reserved. Printed in the U.S.A. Tektronix, Inc., P.O. Box 1000, Wilsonville, OR 97070–1000 TEKTRONIX and TEK are registered trademarks of Tektronix, Inc. SOFTWARE WARRANTY Tektronix warrants that the media on which this software product is furnished and the encoding of the programs on the media will be free from defects in materials and workmanship for a period of three (3) months from the date of shipment. -

CFPRM, Coldfire ® Family Programmer™S
ColdFire® Family Programmer’s Reference Manual Document Number: CFPRM Rev. 3 03/2005 How to Reach Us: Home Page: www.freescale.com E-mail: [email protected] USA/Europe or Locations Not Listed: Freescale Semiconductor Technical Information Center, CH370 1300 N. Alma School Road Chandler, Arizona 85224 Information in this document is provided solely to enable system and +1-800-521-6274 or +1-480-768-2130 software implementers to use Freescale Semiconductor products. There are [email protected] no express or implied copyright licenses granted hereunder to design or fabricate any integrated circuits or integrated circuits based on the Europe, Middle East, and Africa: information in this document. Freescale Halbleiter Deutschland GmbH Technical Information Center Freescale Semiconductor reserves the right to make changes without further Schatzbogen 7 notice to any products herein. Freescale Semiconductor makes no warranty, 81829 Muenchen, Germany representation or guarantee regarding the suitability of its products for any +44 1296 380 456 (English) particular purpose, nor does Freescale Semiconductor assume any liability +46 8 52200080 (English) arising out of the application or use of any product or circuit, and specifically disclaims any and all liability, including without limitation consequential or +49 89 92103 559 (German) incidental damages. “Typical” parameters that may be provided in Freescale +33 1 69 35 48 48 (French) Semiconductor data sheets and/or specifications can and do vary in different [email protected] applications and actual performance may vary over time. All operating parameters, including “Typicals”, must be validated for each customer Japan: application by customer’s technical experts. Freescale Semiconductor does Freescale Semiconductor Japan Ltd. -
Security Target RUGGEDCOM ROS V4.2.2.F 1 2 3 4 5 6 7
Introduction 1 Conformance Claims 2 Security Problem 3 Security Target Security Objectives for the Operational Environment 4 RUGGEDCOM ROS v4.2.2.F Extended Components 5 Security Requirements 6 TOE Summary Specification 7 Conformance Claims Rationale 8 Acronyms and Terms 9 Reference Guide 08/2018 RC1407-EN-01 Reference Guide Copyright © 2018 Siemens Canada Ltd Dissemination or reproduction of this document, or evaluation and communication of its contents, is permitted. Disclaimer Of Liability Siemens has verified the contents of this document against the hardware and/or software described. However, deviations between the product and the documentation may exist. Siemens shall not be liable for any errors or omissions contained herein or for consequential damages in connection with the furnishing, performance, or use of this material. The information given in this document is reviewed regularly and any necessary corrections will be included in subsequent editions. We appreciate any suggested improvements. We reserve the right to make technical improvements without notice. Registered Trademarks RUGGEDCOM™ and ROS™ are trademarks of Siemens Canada Ltd. Other designations in this manual might be trademarks whose use by third parties for their own purposes would infringe the rights of the owner. Third Party Copyrights Siemens recognizes the following third party copyrights: • Copyright © 2004 GoAhead Software, Inc. All Rights Reserved. Open Source RUGGEDCOM ROS contains Open Source Software. For license conditions, refer to the associated License Conditions document. Security Information Siemens provides products and solutions with industrial security functions that support the secure operation of plants, machines, equipment and/or networks. They are important components in a holistic industrial security concept.