Abstract 1. Introduction
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Midnight Train to Georgemas Report Final 08-12-2017
Midnight Train to Georgemas 08/12/2017 Reference number 105983 MIDNIGHT TRAIN TO GEORGEMAS MIDNIGHT TRAIN TO GEORGEMAS MIDNIGHT TRAIN TO GEORGEMAS IDENTIFICATION TABLE Client/Project owner HITRANS Project Midnight Train to Georgemas Study Midnight Train to Georgemas Type of document Report Date 08/12/2017 File name Midnight Train to Georgemas Report v5 Reference number 105983 Number of pages 57 APPROVAL Version Name Position Date Modifications Claire Mackay Principal Author 03/07/2017 James Consultant Jackson David Project 1 Connolly, Checked Director 24/07/2017 by Alan Director Beswick Approved David Project 24/07/2017 by Connolly Director James Principal Author 21/11/2017 Jackson Consultant Alan Modifications Director Beswick to service Checked 2 21/11/2017 costs and by Project David demand Director Connolly forecasts Approved David Project 21/11/2017 by Connolly Director James Principal Author 08/12/2017 Jackson Consultant Alan Director Beswick Checked Final client 3 08/12/2017 by Project comments David Director Connolly Approved David Project 08/12/2017 by Connolly Director TABLE OF CONTENTS 1. INTRODUCTION 6 2. BACKGROUND INFORMATION 6 2.1 EXISTING COACH AND RAIL SERVICES 6 2.2 CALEDONIAN SLEEPER 7 2.3 CAR -BASED TRAVEL TO /FROM THE CAITHNESS /O RKNEY AREA 8 2.4 EXISTING FERRY SERVICES AND POTENTIAL CHANGES TO THESE 9 2.5 AIR SERVICES TO ORKNEY AND WICK 10 2.6 MOBILE PHONE -BASED ESTIMATES OF CURRENT TRAVEL PATTERNS 11 3. STAKEHOLDER CONSULTATION 14 4. PROBLEMS/ISSUES 14 4.2 CONSTRAINTS 16 4.3 RISKS : 16 5. OPPORTUNITIES 17 6. SLEEPER OPERATIONS 19 6.1 INTRODUCTION 19 6.2 SERVICE DESCRIPTION & ROUTING OPTIONS 19 6.3 MIXED TRAIN OPERATION 22 6.4 TRACTION & ROLLING STOCK OPTIONS 25 6.5 TIMETABLE PLANNING 32 7. -

Scotrail Franchise – Franchise Agreement
ScotRail Franchise – Franchise Agreement THE SCOTTISH MINISTERS and ABELLIO SCOTRAIL LIMITED SCOTRAIL FRANCHISE AGREEMENT 6453447-13 ScotRail Franchise – Franchise Agreement TABLE OF CONTENTS 1. Interpretation and Definitions .................................................................................... 1 2. Commencement .......................................................................................................... 2 3. Term ............................................................................................................ 3 4 Franchisee’s Obligations ........................................................................................... 3 5 Unjustified Enrichment ............................................................................................... 4 6 Arm's Length Dealings ............................................................................................... 4 7 Compliance with Laws................................................................................................ 4 8 Entire Agreement ........................................................................................................ 4 9 Governing Law ............................................................................................................ 5 SCHEDULE 1 ............................................................................................................ 7 PASSENGER SERVICE OBLIGATIONS ............................................................................................. 7 SCHEDULE 1.1 ........................................................................................................... -

KWP Titelblaetter
Equal Split in the Informal Market for Group Train Travel by Israel Waichman, Artem Korzhenevych, Till Requate No. 1638 | July 2010 Kiel Institute for the World Economy, Düsternbrooker Weg 120, 24105 Kiel, Germany Kiel Working Paper No.1638 | July 2010 Equal Split in the Informal Market for Group Train Travel Israel Waichman, Artem Korzhenevych, and Till Requate Abstract: In this paper we make use of a unique dataset collected in the central train station of Kiel, Germany. A group ticket is used by individual proposers who search for co-travelers to share the ride with shortly before the train departure. The bargaining behavior resembles the Ultimatum game to the extent that proposers request a fixed price for a shared ride and potential co-travelers usually accept or reject the deal. We observe that the prevailing price corresponds to the equal split of the ticket cost between the maximum possible number of co-travelers. This result is remarkable because the positions of the bargaining parties are hardly symmetric and the formation of the full group is not guaranteed. Using a simple agent-based model we are able to identify some sufficient conditions leading to the observed distribution of prices. Finally, we observed that the probability to accept an unusually high offer is decreasing with the price and increasing when the offer is made right before the train departure. Keywords: natural field experiment; bargaining; focal point; equal split; agent-based model JEL classification: C78; C93; D74; D83 Israel Waichman Artem Korzhenevych Department of Economics, University of Kiel Kiel Institute for the World Economy Olshausenstrasse 40 Hindenburgufer 66 24098 Kiel, Germany 24105 Kiel, Germany E-mail: [email protected] E-mail: [email protected] Till Requate Department of Economics, University of Kiel Olshausenstrasse 40 24098 Kiel, Germany E-mail: [email protected] ____________________________________ The responsibility for the contents of the working papers rests with the author, not the Institute. -
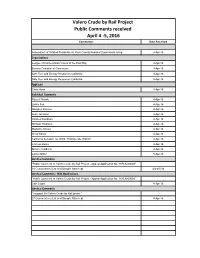
Valero Crude by Rail Project Public Comments Received April 4 -5, 2016 Commenter Date Received
Valero Crude by Rail Project Public Comments received April 4 -5, 2016 Commenter Date Received Association of Irritated Residents vs. Kern County Board of Supervisors ruling 4-Apr-16 Organizations League of Conservation Voters of the East Bay 4-Apr-16 Benicia Chamber of Commerce 4-Apr-16 Safe Fuel and Energy Resources California 4-Apr-16 Safe Fuel and Energy Resources California 5-Apr-16 Applicant Chris Howe 4-Apr-16 Individual Comments Russell Hands 4-Apr-16 Larnie Fox 4-Apr-16 Margaret Ericson 4-Apr-16 Jean Jackman 4-Apr-16 Charles Davidson 4-Apr-16 Michael D'Adamo 4-Apr-16 Madeline Koster 4-Apr-16 Greg Yuhas 4-Apr-16 California Senator Lois Wolk, Third Senate District 4-Apr-16 Frances Burke 4-Apr-16 Simone Cardona 4-Apr-16 Lynne Nittler 5-Apr-16 Identical Comments "Public Comment re Valero Crude by Rail Project - Appeal Application No. 16PLN-00009" 10 Commenters (List and Sample Attached) 4/4-4/5/16 Identical Comments - With Modifications "Public Comment re Valero Crude by Rail Project - Appeal Application No. 16PLN-00009" Cate Leger 4-Apr-16 Identical Comments "I support the Valero Crude by Rail project" 27 Commenters (List and Sample Attached) 4-Apr-16 Superior Court of California County of Kern Bakersfield Traffic Courtroom 2 Hearing Date: April 01, 2016 Time: 8:00 AM - 5:00 PM ASSOCIATION OF IRRITATED RESIDENTS VS KERN COUNTY BOARD OF SUPERVISORS S1500CV283166 Honorable: J. Eric Bradshaw Clerk: Patrick Ogilvie Court Reporter: N/A Bailiff: N/A Interpreter: N/A Language Of: N/A PARTIES: ACE ATTORNEY SERVICE, Non-Party, not present -

Technical Memo #1: Infrastructure and Operations Assessment PERIOD COVERED JAN-JULY 2014
Technical Memo #1: Infrastructure and Operations Assessment PERIOD COVERED JAN-JULY 2014 Prepared by the Olsson Associates Team Prepared for the Montana Department of Transportation 10.27.2014 Technical Memo #1 | Infrastructure and Operations Assessment TECHNICAL REPORT DOCUMENTATION PAGE 1. Report No. 1 2. Government Accession No. 3. Recipient's Catalog No. 4. Title and Subtitle 5. Report Date October 27, 2014 Great Northern Corridor SWOT Analysis – Technical Memorandum #1 6. Performing Organization Code 7. Author(s) 8. Performing Organization Report No. 1 Olsson Associates Parsons Brinckerhoff The Beckett Group 9. Performing Organization Name and Address 10. Work Unit No. Olsson Associates th 2111 S. 67 Street, Suite 200 11. Contract or Grant No. Omaha, NE 68106 12. Sponsoring Agency Name and Address 13. Type of Report and Period Covered Research Programs Type: Technical Memorandum Montana Department of Transportation Period Covered: January 2014-July 2014 2701 Prospect Avenue PO Box 201001 14. Sponsoring Agency Code 5401 Helena MT 59620-1001 15. Supplementary Notes Research performed in cooperation with the Montana Department of Transportation and the US Department of Transportation, Federal Highway Administration. 16. Abstract For the Great Northern Corridor Coalition, the Olsson Associates team is conducting a Strengths, Weaknesses, Opportunities, and Threats (SWOT) Analysis of the Great Northern Corridor. Technical Memorandum #1 serves as The Great Northern Corridor Infrastructure and Operations Assessment Report and provides a comprehensive description of the GNC from a freight multimodal infrastructure and operations perspective. Following are the primary GNC elements included in the report: • The existing Class I railway line operated by BNSF Railway between Chicago, Illinois and Duluth, Minnesota on the east, and Portland Oregon, Seattle, Washington and Vancouver, B.C. -

Equal Split in the Informal Market for Group Train Travel
A Service of Leibniz-Informationszentrum econstor Wirtschaft Leibniz Information Centre Make Your Publications Visible. zbw for Economics Waichman, Israel; Korzhenevych, Artem; Requate, Till Working Paper Equal split in the informal market for group train travel Kiel Working Paper, No. 1638 Provided in Cooperation with: Kiel Institute for the World Economy (IfW) Suggested Citation: Waichman, Israel; Korzhenevych, Artem; Requate, Till (2010) : Equal split in the informal market for group train travel, Kiel Working Paper, No. 1638, Kiel Institute for the World Economy (IfW), Kiel This Version is available at: http://hdl.handle.net/10419/37098 Standard-Nutzungsbedingungen: Terms of use: Die Dokumente auf EconStor dürfen zu eigenen wissenschaftlichen Documents in EconStor may be saved and copied for your Zwecken und zum Privatgebrauch gespeichert und kopiert werden. personal and scholarly purposes. Sie dürfen die Dokumente nicht für öffentliche oder kommerzielle You are not to copy documents for public or commercial Zwecke vervielfältigen, öffentlich ausstellen, öffentlich zugänglich purposes, to exhibit the documents publicly, to make them machen, vertreiben oder anderweitig nutzen. publicly available on the internet, or to distribute or otherwise use the documents in public. Sofern die Verfasser die Dokumente unter Open-Content-Lizenzen (insbesondere CC-Lizenzen) zur Verfügung gestellt haben sollten, If the documents have been made available under an Open gelten abweichend von diesen Nutzungsbedingungen die in der dort Content Licence (especially Creative Commons Licences), you genannten Lizenz gewährten Nutzungsrechte. may exercise further usage rights as specified in the indicated licence. www.econstor.eu Equal Split in the Informal Market for Group Train Travel by Israel Waichman, Artem Korzhenevych, Till Requate No. -
The Structure of Freight Flows in Europe and Its Implications for EU Railway Freight Policy
The structure of freight flows in Europe and its implications for EU railway freight policy by Kay Mitusch, Gernot Liedtke, Laurent Guihery, David Bälz No. 61 | SEPTEMBER 2014 WORKING PAPER SERIES IN ECONOMICS KIT – University of the State of Baden-Wuerttemberg and National Laboratory of the Helmholtz Association econpapers.wiwi.kit.edu Impressum Karlsruher Institut für Technologie (KIT) Fakultät für Wirtschaftswissenschaften Institut für Volkswirtschaftslehre (ECON) Schlossbezirk 12 76131 Karlsruhe KIT – Universität des Landes Baden-Württemberg und nationales Forschungszentrum in der Helmholtz-Gemeinschaft Working Paper Series in Economics No. 61, September 2014 ISSN 2190-9806 econpapers.wiwi.kit.edu The Structure of Freight Flows in Europe and its Implications for EU Railway Freight Policy Kay Mitusch, Gernot Liedtke, Laurent Guihery, David Bälz1 Abstract We analyse the potential for shifting freight transports to the railways in Western and Cen- tral Europe. This potential arises for large and concentrated freight flows over long distances of about 300 km or more. However, we show that there are only few such freight flows in Europe, and that they are concentrated or connected to the central European population centers, sometimes called the “Blue Banana”. As a consequence, the European railway freight corridors according to EU Regulation 913/2010 should be divided into two distinct groups: first tier and second tier corridors. Substantial innovations should be introduced on the first tier corridors first, in order to increase efficiency -
Options for Regional Rail Report
Options for Regional Rail A review of ways to improve Britain’s regional rail services October 2013 1 Author contacts This report was researched and written by: Dr Ian Taylor Dr Lynn Sloman Transport for Quality of Life Ltd www.transportforqualityoflife.com [email protected] ©Copyright Transport for Quality of Life Ltd. All rights reserved. Disclaimers Statements in this report reflect the authors’ views based on the available data and should not be taken as official pteg policy. Acknowledgements The authors are most grateful to Pedro Abrantes, economist at pteg , for access to his researches into rail company financial data and patient explanations of its implications. Terminology and scope This report covers options relevant to Scotland and Wales as well as the English regions, and where the term regional rail is used it should be taken to include the rail services within the devolved nations. This terminology is rather insensitive but does accord with the Office of Rail Regulation definition of regional train services and with the European Union use of regional. Similarly, the term ‘regional transport authority’ is adopted to cover the different public bodies with varying degrees of authority over regional rail services, in particular the governments of the devolved nations and the passenger transport executives, but also to include similar public bodies that might arise in other regions of England in order to take on devolved responsibilities for regional rail. The options presented for regional rail in this report are not, however, intended to extend to Northern Ireland, which has a completely separate rail system, physically unconnected to the rest of Britain’s rail network, although with important rail links to Eire, and with track and trains within public ownership and already under entirely autonomous management by the Northern Ireland Executive. -

Market Potential and Value of Sustainable Freight Transport Chains
Research Collection Doctoral Thesis Market potential and value of sustainable freight transport chains Author(s): Fries, Nikolaus Publication Date: 2009 Permanent Link: https://doi.org/10.3929/ethz-a-006001850 Rights / License: In Copyright - Non-Commercial Use Permitted This page was generated automatically upon download from the ETH Zurich Research Collection. For more information please consult the Terms of use. ETH Library DISS ETH NO. 18685 MARKET POTENTIAL AND VALUE OF SUSTAINABLE FREIGHT TRANSPORT CHAINS A dissertation submitted to ETH ZURICH for the degree of Doctor of Sciences presented by HANS THOMSEN NIKOLAUS FRIES Diplom-Verkehrsingenieur, Technische Universität Dresden born 30th April, 1979 citizen of Germany accepted on the recommendation of Prof. Dr. Ulrich Weidmann, examiner Prof. Dr. Stefanie Hellweg, co-examiner Prof. Dr. Gerard C. de Jong, co-examiner 2009 Abstract The transport sector accounts for 31% of today’s total EU energy consumption and has become the largest emitter of greenhouse gases, which in 2005 was responsible for 27% of the EU’s total annual volume. Whilst today most manufacturing companies claim to consider environmental concerns in their management strategy (e.g. by introducing environmental management systems), logistics are often not included in this process. This is, because logistic processes are normally not visible to the customer and thus difficult to integrate into an environmental marketing strategy. Nevertheless, recent studies show a trend toward increasing shipper sensitivity to CO2-emissions in freight transport. Among logistics service providers (i.e. freight forwarders etc.) and politicians this issue is also being discussed. One idea is to provide the clients (i.e. -

1 Caledonian Sleeper Services Are Known Within the Railway Industry As the “Lowland” and “Highland” Sleeper
CALEDONIAN SLEEPER SERVICES – CURRENT OPERATING ARRANGEMENTS 1. Background 1.1 Sleeping Car services have operated in Britain at least since 1873 when the North British Railway introduced a service from Glasgow Queen Street and Edinburgh Waverley to London Kings Cross. At one point a whole range of services operated, for example from London to Holyhead, Barrow and Stranraer, but as road and air competition intensified and with improvements to the timings of daytime services, sleeper services were revised so that by the mid-1990s the current pattern of services has been in place. 1.2 Britain’s sleeper services today comprise the Caledonian Sleeper (the subject of this report) and the Night Riviera service. The Night Riviera is operated by First Great Western and runs 6 days a week (Sunday to Friday nights) from London Paddington to Penzance and vice versa. 1.3 There is a long history of seated vehicles on overnight services. Often there were dedicated overnight Anglo-Scottish seated trains, sometimes with relatively old rolling stock. The 1980s saw British Rail try the “Nightrider” concept whereby high quality First Class seated vehicles with customised saloon lighting formed a combined service from Aberdeen, Glasgow and Edinburgh to London. In 1992 an agreement was reached between the InterCity Sector of British Rail, who were now running overnight services, and Stagecoach which involved Stagecoach leasing several vehicles and marketing and staffing seated services on the overnight Aberdeen to London services. Whilst this arrangement was short lived it confirmed that there was a potential market for seats on overnight trains. With the ending of the British Rail sectors and preparation for privatisation, the Caledonian Sleeper services were transferred to the ScotRail “Shadow Franchise”. -

Passenger Night Trains in Europe: the End of the Line?
DIRECTORATE-GENERAL FOR INTERNAL POLICIES Policy Department for Structural and Cohesion Policies Transport and Tourism Research for TRAN Committee - Passenger night trains in Europe: the end of the line? STUDY This document was requested by the European Parliament's Committee on Transport and Tourism. AUTHORS Steer Davies Gleave: Gordon Bird, Jim Collins, Niccolò Da Settimo, Dick Dunmore, Simon Ellis, Mohammad Khan, Michelle Kwok, Tom Leach, Alberto Preti, Davide Ranghetti, Christoph Vollath Politecnico di Milano for Steer Davies Gleave: Paolo Beria, Antonio Laurino, Dario Nistri Research manager: Christina RATCLIFF Project and publication assistance: Jeanette BELL Policy Department for Structural and Cohesion Policies, European Parliament LINGUISTIC VERSIONS Original: EN ABOUT THE PUBLISHER To contact the Policy Department or to subscribe to updates on our work for TRAN Committee please write to: [email protected] Manuscript completed in May 2017. © European Union, 2017 Print ISBN 978-92-846-0021-2 doi:10.2861/285914 QA-02-16-969-EN-C PDF ISBN 978-92-846-0020-5 doi:10.2861/414087 QA-02-16-969-EN-N This document is available on the internet at: http://www.europarl.europa.eu/RegData/etudes/STUD/2016/585891/IPOL_STU(2016)5858 91_EN.pdf Please use the following reference to cite this study: Steer Davies Gleave supported by TRASPOL - Politecnico di Milano, 2017, Research for TRAN Committee – Passenger night trains in Europe: the end of the line?, European Parliament, Policy Department for Structural and Cohesion Policies, Brussels Please use the following reference for in-text citations: Steer Davies Gleave/Politecnico di Milano (2017) DISCLAIMER The opinions expressed in this document are the sole responsibility of the author and do not necessarily represent the official position of the European Parliament. -

The Structure of Freight Flows in Europe and Its Implications for EU Railway Freight Policy
A Service of Leibniz-Informationszentrum econstor Wirtschaft Leibniz Information Centre Make Your Publications Visible. zbw for Economics Mitusch, Kay; Liedtke, Gernot; Guihery, Laurent; Bälz, David Working Paper The structure of freight flows in Europe and its implications for EU railway freight policy KIT Working Paper Series in Economics, No. 61 Provided in Cooperation with: Karlsruhe Institute of Technology (KIT), Institute of Economics (ECON) Suggested Citation: Mitusch, Kay; Liedtke, Gernot; Guihery, Laurent; Bälz, David (2014) : The structure of freight flows in Europe and its implications for EU railway freight policy, KIT Working Paper Series in Economics, No. 61, Karlsruher Institut für Technologie (KIT), Institut für Volkswirtschaftslehre (ECON), Karlsruhe, http://dx.doi.org/10.5445/IR/1000043157 This Version is available at: http://hdl.handle.net/10419/102044 Standard-Nutzungsbedingungen: Terms of use: Die Dokumente auf EconStor dürfen zu eigenen wissenschaftlichen Documents in EconStor may be saved and copied for your Zwecken und zum Privatgebrauch gespeichert und kopiert werden. personal and scholarly purposes. Sie dürfen die Dokumente nicht für öffentliche oder kommerzielle You are not to copy documents for public or commercial Zwecke vervielfältigen, öffentlich ausstellen, öffentlich zugänglich purposes, to exhibit the documents publicly, to make them machen, vertreiben oder anderweitig nutzen. publicly available on the internet, or to distribute or otherwise use the documents in public. Sofern die Verfasser die Dokumente unter Open-Content-Lizenzen (insbesondere CC-Lizenzen) zur Verfügung gestellt haben sollten, If the documents have been made available under an Open gelten abweichend von diesen Nutzungsbedingungen die in der dort Content Licence (especially Creative Commons Licences), you genannten Lizenz gewährten Nutzungsrechte.