Stochastic Differential Equations
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
ENIGMA X Aka SPARKLE Enclosure Manual Ver 7 012017
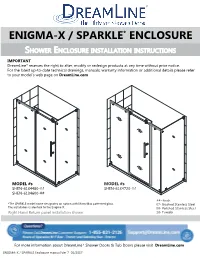
ENIGMA-X / SPARKLE* ENCLOSURE SHOWER ENCLOSURE INSTALLATION INSTRUCTIONS IMPORTANT DreamLine® reserves the right to alter, modify or redesign products at any time without prior notice. For the latest up-to-date technical drawings, manuals, warranty information or additional details please refer to your model’s web page on DreamLine.com MODEL #s MODEL #s SHEN-6134480-## SHEN-6134720-## SHEN-6134600-## ##=finish *The SPARKLE model name designates an option with MirrorMax patterned glass. 07- Brushed Stainless Steel The installation is identical to the Enigma-X. 08- Polished Stainless Steel Right Hand Return panel installation shown 18- Tuxedo For more information about DreamLine® Shower Doors & Tub Doors please visit DreamLine.com ENIGMA-X / SPARKLE Enclosure manual Ver 7 01/2017 This model is treated with DreamLine’s exclusive ClearMaxTM Glass technology. This is a specially formulated coating that prevents the build up of soap and water spots. Install the surface with the ClearMaxTM label towards the inside of the shower. Please note that depending on the model, the glass may be coated on either one or both surfaces. For best results, squeegee the glass after each use and dry with a soft cloth. ENIGMA-X / SPARKLE Enclosure manual Ver 7 01/2017 2 B B A A C ! E IMPORTANT INFORMATION REGARDING THE INSTALLATION OF THIS SHOWER DOOR D PANEL DOOR F Right hand door installation shown as an example A Guide Rail Brackets must be firmly D Roller Guards must be postioned and attached to the wall. Installation into a secured within 1/16” of Upper Guide Rail. stud is strongly recommended. -

Percent R, X and Z Based on Transformer KVA
SHORT CIRCUIT FAULT CALCULATIONS Short circuit fault calculations as required to be performed on all electrical service entrances by National Electrical Code 110-9, 110-10. These calculations are made to assure that the service equipment will clear a fault in case of short circuit. To perform the fault calculations the following information must be obtained: 1. Available Power Company Short circuit KVA at transformer primary : Contact Power Company, may also be given in terms of R + jX. 2. Length of service drop from transformer to building, Type and size of conductor, ie., 250 MCM, aluminum. 3. Impedance of transformer, KVA size. A. %R = Percent Resistance B. %X = Percent Reactance C. %Z = Percent Impedance D. KVA = Kilovoltamp size of transformer. ( Obtain for each transformer if in Bank of 2 or 3) 4. If service entrance consists of several different sizes of conductors, each must be adjusted by (Ohms for 1 conductor) (Number of conductors) This must be done for R and X Three Phase Systems Wye Systems: 120/208V 3∅, 4 wire 277/480V 3∅ 4 wire Delta Systems: 120/240V 3∅, 4 wire 240V 3∅, 3 wire 480 V 3∅, 3 wire Single Phase Systems: Voltage 120/240V 1∅, 3 wire. Separate line to line and line to neutral calculations must be done for single phase systems. Voltage in equations (KV) is the secondary transformer voltage, line to line. Base KVA is 10,000 in all examples. Only those components actually in the system have to be included, each component must have an X and an R value. Neutral size is assumed to be the same size as the phase conductors. -

A Quotient Rule Integration by Parts Formula Jennifer Switkes ([email protected]), California State Polytechnic Univer- Sity, Pomona, CA 91768
A Quotient Rule Integration by Parts Formula Jennifer Switkes ([email protected]), California State Polytechnic Univer- sity, Pomona, CA 91768 In a recent calculus course, I introduced the technique of Integration by Parts as an integration rule corresponding to the Product Rule for differentiation. I showed my students the standard derivation of the Integration by Parts formula as presented in [1]: By the Product Rule, if f (x) and g(x) are differentiable functions, then d f (x)g(x) = f (x)g(x) + g(x) f (x). dx Integrating on both sides of this equation, f (x)g(x) + g(x) f (x) dx = f (x)g(x), which may be rearranged to obtain f (x)g(x) dx = f (x)g(x) − g(x) f (x) dx. Letting U = f (x) and V = g(x) and observing that dU = f (x) dx and dV = g(x) dx, we obtain the familiar Integration by Parts formula UdV= UV − VdU. (1) My student Victor asked if we could do a similar thing with the Quotient Rule. While the other students thought this was a crazy idea, I was intrigued. Below, I derive a Quotient Rule Integration by Parts formula, apply the resulting integration formula to an example, and discuss reasons why this formula does not appear in calculus texts. By the Quotient Rule, if f (x) and g(x) are differentiable functions, then ( ) ( ) ( ) − ( ) ( ) d f x = g x f x f x g x . dx g(x) [g(x)]2 Integrating both sides of this equation, we get f (x) g(x) f (x) − f (x)g(x) = dx. -
CONSONANT DIGRAPH- /Ch/ at the Beginning of Words
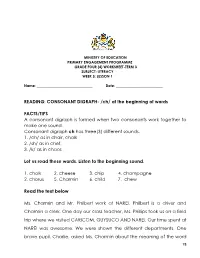
MINISTRY OF EDUCATION PRIMARY ENGAGEMENT PROGRAMME GRADE FOUR (4) WORKSHEET-TERM 3 SUBJECT: LITERACY WEEK 5: LESSON 1 Name: _______________________________ Date: __________________________ READING: CONSONANT DIGRAPH- /ch/ at the beginning of words FACTS/TIPS A consonant digraph is formed when two consonants work together to make one sound. Consonant digraph ch has three(3) different sounds. 1. /ch/ as in chair, chalk 2. /sh/ as in chef, 3. /k/ as in chaos Let us read these words. Listen to the beginning sound. 1. chalk 2. cheese 3. chip 4. champagne 2. chorus 5. Charmin 6. child 7. chew Read the text below Ms. Charmin and Mr. Philbert work at NAREI. Philbert is a driver and Charmin a clerk. One day our class teacher, Ms. Phillips took us on a field trip where we visited CARICOM, GUYSUCO AND NAREI. Our time spent at NAREI was awesome. We were shown the different departments. One brave pupil, Charlie, asked Ms. Charmin about the meaning of the word 78 NAREI. She told us that the word NAREI is an acronym that means National Agricultural Research and Extension Institute. Ms. Charmin then went on to explain to us the products that are made there. After our tour around the compound, she gave us huge packages of some of the products. We were so excited that we jumped for joy. We took a photograph with her, thanked her and then bid her farewell. On our way back to school we spoke of our day out. We all agreed that it was very informative. ON YOUR OWN Say the words below and listen to the beginning sound. -

Band Radar Models FR-2115-B/2125-B/2155-B*/2135S-B
R BlackBox type (with custom monitor) X/S – band Radar Models FR-2115-B/2125-B/2155-B*/2135S-B I 12, 25 and 50* kW T/R up X-band, 30 kW I Dual-radar/full function remote S-band inter-switching I SXGA PC monitor either CRT or color I New powerful processor with LCD high-speed, high-density gate array and I Optional ARP-26 Automatic Radar sophisticated software Plotting Aid (ARPA) on 40 targets I New cast aluminum scanner gearbox I Furuno's exclusive chart/radar overlay and new series of streamlined radiators technique by optional RP-26 VideoPlotter I Shared monitor utilization of Radar and I Easy to create radar maps PC systems with custom PC monitor switching system The BlackBox radar system FR-2115-B, FR-2125-B, FR-2155-B* and FR-2135S-B are custom configured by adding a user’s favorite display to the blackbox radar package. The package is based on a Furuno standard radar used in the FR-21x5-B series with (FURUNO) monitor which is designed to comply with IMO Res MSC.64(67) Annex 4 for shipborne radar and A.823 (19) for ARPA performance. The display unit may be selected from virtually any size of multi-sync PC monitor, either a CRT screen or flat panel LCD display. The blackbox radar system is suitable for various ships which require no specific type approval as a SOLAS compliant radar. The radar is available in a variety of configurations: 12, 25, 30 and 50* kW output, short or long antenna radiator, 24 or 42 rpm scanner, with standard Electronic Plotting Aid (EPA) and optional Automatic Radar Plotting Aid (ARPA). -

ON the THEORY of KERNELS of SCHWARTZ1 (Lf)(X) = J S(X,Y)
ON THE THEORY OF KERNELS OF SCHWARTZ1 LEON EHRENPREIS Let 3Ddenote the space of indefinitely differentiable functions of compact carrier on Euclidean space R of dimension p, and denote by 3D'the dual of 3D,that is, 30' is the space of distributions on R; we give 3Dand 3D' their usual topologies (see [2]). By 23D,23D' we denote re- spectively the spaces corresponding to 3Dand 3D'on AXA. Let L be any continuous linear map of 3D—»3D';then L. Schwartz has shown (see [3 ] for a summary of Schwartz' results, the details will appear in a series of articles in the Journal D'Analyse (Jerusalem)) that L can be represented by a kernel, i.e. there exists a distribution S on AXA so that we may write (symbolically) (Lf)(x) = j S(x,y)f(y)dy for any /G 3D. The purpose of this paper is to give a simple proof of this fact and to prove the following result: Let us give the space of continuous linear mappings of 3D—»3D'the compact-open topology (see [l]); then this topology is the same as that of the space 23D'. We shall also obtain an explicit expression for the topology of the space 2DXof continuous linear maps of 3D' into 3Dwith the compact- open topology. The elements of 3DXare those of jSD,but the topology of 23Dis stronger than that of 3DX.It is possible to extend the above methods and results to other spaces, e.g. the space S of Schwartz. Moreover, the methods and results can be easily extended to in- definitely differentiable manifolds and double coset spaces of Lie groups (cf. -

The Derivative Let F(X) Be a Function and Suppose That C Is in the Domain
The Derivative Let f(x) be a function and suppose that c is in the domain of f. The derivative of f at c is f(c + h) − f(c) lim h!0 h (supposing that this limits exists). The function f(x) is differentiable at x = c if f 0(c) exists. 1 The derivative of f(x) (as a function of x) is f(x + h) − f(x) f 0(x) = lim : h!0 h [The domain of this function is the set of values for which this limit exists.] 2 Things the derivative can mean: [More details on all of these later] • The slope of the tangent line. [The tangent line at x = c, in turn, is the best linear approximation to f at the point (c; f(c)).] • The instantaneous rate of change of f. • If f(x) measures where a point is, f 0(x) measures the velocity of the function. [The derivative also allows us to calculate maximum (or mini- mum) values of f(x).] 3 Examples: Calculate f 0(x) where: 1. f(x) = 3x + 5; 2. f(x) = 2x2 − 5x + 1; 3. f(x) = x3; 4. f(x) = x4. 4 Let f(x) be a function. The tangent line to the curve y = f(x) at a point x = c is the straight line which • Touches the curve y = f(x) at (c; f(c)); and • Is the straight line which best approximates the curve y = f(x) and goes through (c; f(c)). 5 The tangent line to the graph of y = f(x) at x = c. -

Chaotic Decompositions in Z2-Graded Quantum Stochastic Calculus
QUANTUM PROBABILITY BANACH CENTER PUBLICATIONS, VOLUME 43 INSTITUTE OF MATHEMATICS POLISH ACADEMY OF SCIENCES WARSZAWA 1998 CHAOTIC DECOMPOSITIONS IN Z2-GRADED QUANTUM STOCHASTIC CALCULUS TIMOTHY M. W. EYRE Department of Mathematics, University of Nottingham Nottingham, NG7 2RD, UK E-mail: [email protected] Abstract. A brief introduction to Z2-graded quantum stochastic calculus is given. By inducing a superalgebraic structure on the space of iterated integrals and using the heuristic classical relation df(Λ) = f(Λ+dΛ)−f(Λ) we provide an explicit formula for chaotic expansions of polynomials of the integrator processes of Z2-graded quantum stochastic calculus. 1. Introduction. A theory of Z2-graded quantum stochastic calculus was was in- troduced in [EH] as a generalisation of the one-dimensional Boson-Fermion unification result of quantum stochastic calculus given in [HP2]. Of particular interest in Z2-graded quantum stochastic calculus is the result that the integrators of the theory provide a time-indexed family of representations of a broad class of Lie superalgebras. The notion of a Lie superalgebra was introduced in [K] and has received considerable attention since. It is essentially a Z2-graded analogue of the notion of a Lie algebra with a bracket that is, in a certain sense, partly a commutator and partly an anticommutator. Another work on Lie superalgebras is [S] and general superalgebras are treated in [C,S]. The Lie algebra representation properties of ungraded quantum stochastic calculus enabled an explicit formula for the chaotic expansion of elements of an associated uni- versal enveloping algebra to be developed in [HPu]. -

A Stochastic Fractional Calculus with Applications to Variational Principles
fractal and fractional Article A Stochastic Fractional Calculus with Applications to Variational Principles Houssine Zine †,‡ and Delfim F. M. Torres *,‡ Center for Research and Development in Mathematics and Applications (CIDMA), Department of Mathematics, University of Aveiro, 3810-193 Aveiro, Portugal; [email protected] * Correspondence: delfi[email protected] † This research is part of first author’s Ph.D. project, which is carried out at the University of Aveiro under the Doctoral Program in Applied Mathematics of Universities of Minho, Aveiro, and Porto (MAP). ‡ These authors contributed equally to this work. Received: 19 May 2020; Accepted: 30 July 2020; Published: 1 August 2020 Abstract: We introduce a stochastic fractional calculus. As an application, we present a stochastic fractional calculus of variations, which generalizes the fractional calculus of variations to stochastic processes. A stochastic fractional Euler–Lagrange equation is obtained, extending those available in the literature for the classical, fractional, and stochastic calculus of variations. To illustrate our main theoretical result, we discuss two examples: one derived from quantum mechanics, the second validated by an adequate numerical simulation. Keywords: fractional derivatives and integrals; stochastic processes; calculus of variations MSC: 26A33; 49K05; 60H10 1. Introduction A stochastic calculus of variations, which generalizes the ordinary calculus of variations to stochastic processes, was introduced in 1981 by Yasue, generalizing the Euler–Lagrange equation and giving interesting applications to quantum mechanics [1]. Recently, stochastic variational differential equations have been analyzed for modeling infectious diseases [2,3], and stochastic processes have shown to be increasingly important in optimization [4]. In 1996, fifteen years after Yasue’s pioneer work [1], the theory of the calculus of variations evolved in order to include fractional operators and better describe non-conservative systems in mechanics [5]. -

List of Approved Special Characters
List of Approved Special Characters The following list represents the Graduate Division's approved character list for display of dissertation titles in the Hooding Booklet. Please note these characters will not display when your dissertation is published on ProQuest's site. To insert a special character, simply hold the ALT key on your keyboard and enter in the corresponding code. This is only for entering in a special character for your title or your name. The abstract section has different requirements. See abstract for more details. Special Character Alt+ Description 0032 Space ! 0033 Exclamation mark '" 0034 Double quotes (or speech marks) # 0035 Number $ 0036 Dollar % 0037 Procenttecken & 0038 Ampersand '' 0039 Single quote ( 0040 Open parenthesis (or open bracket) ) 0041 Close parenthesis (or close bracket) * 0042 Asterisk + 0043 Plus , 0044 Comma ‐ 0045 Hyphen . 0046 Period, dot or full stop / 0047 Slash or divide 0 0048 Zero 1 0049 One 2 0050 Two 3 0051 Three 4 0052 Four 5 0053 Five 6 0054 Six 7 0055 Seven 8 0056 Eight 9 0057 Nine : 0058 Colon ; 0059 Semicolon < 0060 Less than (or open angled bracket) = 0061 Equals > 0062 Greater than (or close angled bracket) ? 0063 Question mark @ 0064 At symbol A 0065 Uppercase A B 0066 Uppercase B C 0067 Uppercase C D 0068 Uppercase D E 0069 Uppercase E List of Approved Special Characters F 0070 Uppercase F G 0071 Uppercase G H 0072 Uppercase H I 0073 Uppercase I J 0074 Uppercase J K 0075 Uppercase K L 0076 Uppercase L M 0077 Uppercase M N 0078 Uppercase N O 0079 Uppercase O P 0080 Uppercase -

A Short History of Stochastic Integration and Mathematical Finance
A Festschrift for Herman Rubin Institute of Mathematical Statistics Lecture Notes – Monograph Series Vol. 45 (2004) 75–91 c Institute of Mathematical Statistics, 2004 A short history of stochastic integration and mathematical finance: The early years, 1880–1970 Robert Jarrow1 and Philip Protter∗1 Cornell University Abstract: We present a history of the development of the theory of Stochastic Integration, starting from its roots with Brownian motion, up to the introduc- tion of semimartingales and the independence of the theory from an underlying Markov process framework. We show how the development has influenced and in turn been influenced by the development of Mathematical Finance Theory. The calendar period is from 1880 to 1970. The history of stochastic integration and the modelling of risky asset prices both begin with Brownian motion, so let us begin there too. The earliest attempts to model Brownian motion mathematically can be traced to three sources, each of which knew nothing about the others: the first was that of T. N. Thiele of Copen- hagen, who effectively created a model of Brownian motion while studying time series in 1880 [81].2; the second was that of L. Bachelier of Paris, who created a model of Brownian motion while deriving the dynamic behavior of the Paris stock market, in 1900 (see, [1, 2, 11]); and the third was that of A. Einstein, who proposed a model of the motion of small particles suspended in a liquid, in an attempt to convince other physicists of the molecular nature of matter, in 1905 [21](See [64] for a discussion of Einstein’s model and his motivations.) Of these three models, those of Thiele and Bachelier had little impact for a long time, while that of Einstein was immediately influential. -

Proposal for Generation Panel for Latin Script Label Generation Ruleset for the Root Zone
Generation Panel for Latin Script Label Generation Ruleset for the Root Zone Proposal for Generation Panel for Latin Script Label Generation Ruleset for the Root Zone Table of Contents 1. General Information 2 1.1 Use of Latin Script characters in domain names 3 1.2 Target Script for the Proposed Generation Panel 4 1.2.1 Diacritics 5 1.3 Countries with significant user communities using Latin script 6 2. Proposed Initial Composition of the Panel and Relationship with Past Work or Working Groups 7 3. Work Plan 13 3.1 Suggested Timeline with Significant Milestones 13 3.2 Sources for funding travel and logistics 16 3.3 Need for ICANN provided advisors 17 4. References 17 1 Generation Panel for Latin Script Label Generation Ruleset for the Root Zone 1. General Information The Latin script1 or Roman script is a major writing system of the world today, and the most widely used in terms of number of languages and number of speakers, with circa 70% of the world’s readers and writers making use of this script2 (Wikipedia). Historically, it is derived from the Greek alphabet, as is the Cyrillic script. The Greek alphabet is in turn derived from the Phoenician alphabet which dates to the mid-11th century BC and is itself based on older scripts. This explains why Latin, Cyrillic and Greek share some letters, which may become relevant to the ruleset in the form of cross-script variants. The Latin alphabet itself originated in Italy in the 7th Century BC. The original alphabet contained 21 upper case only letters: A, B, C, D, E, F, Z, H, I, K, L, M, N, O, P, Q, R, S, T, V and X.