Design and Evaluation of Ethernet-Based E/E-Architectures for Latency- and Safety-Critical Applications
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
IEEE Std 802.3™-2012 New York, NY 10016-5997 (Revision of USA IEEE Std 802.3-2008)
IEEE Standard for Ethernet IEEE Computer Society Sponsored by the LAN/MAN Standards Committee IEEE 3 Park Avenue IEEE Std 802.3™-2012 New York, NY 10016-5997 (Revision of USA IEEE Std 802.3-2008) 28 December 2012 IEEE Std 802.3™-2012 (Revision of IEEE Std 802.3-2008) IEEE Standard for Ethernet Sponsor LAN/MAN Standards Committee of the IEEE Computer Society Approved 30 August 2012 IEEE-SA Standard Board Abstract: Ethernet local area network operation is specified for selected speeds of operation from 1 Mb/s to 100 Gb/s using a common media access control (MAC) specification and management information base (MIB). The Carrier Sense Multiple Access with Collision Detection (CSMA/CD) MAC protocol specifies shared medium (half duplex) operation, as well as full duplex operation. Speed specific Media Independent Interfaces (MIIs) allow use of selected Physical Layer devices (PHY) for operation over coaxial, twisted-pair or fiber optic cables. System considerations for multisegment shared access networks describe the use of Repeaters that are defined for operational speeds up to 1000 Mb/s. Local Area Network (LAN) operation is supported at all speeds. Other specified capabilities include various PHY types for access networks, PHYs suitable for metropolitan area network applications, and the provision of power over selected twisted-pair PHY types. Keywords: 10BASE; 100BASE; 1000BASE; 10GBASE; 40GBASE; 100GBASE; 10 Gigabit Ethernet; 40 Gigabit Ethernet; 100 Gigabit Ethernet; attachment unit interface; AUI; Auto Negotiation; Backplane Ethernet; data processing; DTE Power via the MDI; EPON; Ethernet; Ethernet in the First Mile; Ethernet passive optical network; Fast Ethernet; Gigabit Ethernet; GMII; information exchange; IEEE 802.3; local area network; management; medium dependent interface; media independent interface; MDI; MIB; MII; PHY; physical coding sublayer; Physical Layer; physical medium attachment; PMA; Power over Ethernet; repeater; type field; VLAN TAG; XGMII The Institute of Electrical and Electronics Engineers, Inc. -

Revision to IEEE Std 802.3-2012 Initial Sponsor Ballot Comments
IEEE P802.3 (IEEE 802.3bx) Revision to IEEE Std 802.3-2012 Initial Sponsor ballot comments Cl 00 SC 0 P L # i-55 Cl 00 SC 0 P L # i-54 Anslow, Peter Ciena Corporation Anslow, Peter Ciena Corporation Comment Type E Comment Status A Comment Type E Comment Status A Now that IEEE Std 802.3bm-2015 has been published, the changes made during the The draft is not consistent in its use of hyphens associated with AC and DC. There are: publication process should be incorporated into the draft. 33 instances of "AC-coupled" (3 of which are "ac-coupled") 44 instances of "AC-coupling" SuggestedRemedy 4 instances of "DC-blocking" Incorporate the changes made during the publication process of IEEE Std 802.3bm-2015 5 instances of "DC-referenced" into the draft. 2 instances of "dc-balanced" Response Response Status C 25 instances of "AC coupled" (2 of which are "ac coupled") 49 instances of "AC coupling" (1 of which is "ac coupling") ACCEPT. 1 instance of "DC coupled" 5 instances of "DC blocking" Cl 00 SC 0 P L # i-18 3 instances of "DC balanced" RAN, ADEE Intel Corporation SuggestedRemedy Comment Type G Comment Status R Change all instances to "AC-coupled", "AC-coupling", "DC-blocking", "DC-referenced", or In the 2012 edition and in past projects, annex top-level bookmarks included the title, "DC-balanced" as appropriate. similar to the clauses. In this project, only the annex label is included - the title is a second- Response Response Status C level bookmark. This can make life more difficult for readers. -
Ethernet Explained
Technical Note TN_157 Ethernet Explained Version 1.0 Issue Date: 2015-03-23 The FTDI FT900 32 bit MCU series, provides for high data rate, computationally intensive data transfers. One of the interfaces used for this high speed communication is Ethernet. This application note discusses some of the key features of an Ethernet link and how the FT900 assists in establishing the link. Use of FTDI devices in life support and/or safety applications is entirely at the user’s risk, and the user agrees to defend, indemnify and hold FTDI harmless from any and all damages, claims, suits or expense resulting from such use. Future Technology Devices International Limited (FTDI) Unit 1, 2 Seaward Place, Glasgow G41 1HH, United Kingdom Tel.: +44 (0) 141 429 2777 Fax: + 44 (0) 141 429 2758 Web Site: http://ftdichip.com Copyright © 2015 Future Technology Devices International Limited Technical Note TN_157 Ethernet Explained Version 1.0 Document Reference No.: FT_001105 Clearance No.: FTDI# 442 Table of Contents 1 Introduction .................................................................................................................................... 3 1.1 Scope ....................................................................................................................................... 3 2 What is Ethernet? ........................................................................................................................... 4 2.1 Speeds .................................................................................................................................... -

Packet Frame Structure Preamble
Packet Frame Structure Preamble Dana remains diluvian after Hans-Peter weekend determinably or proven any overlook. Rustin ullages afar while employable Caldwell causeways ignobly or evidenced proprietorially. Pampering Nunzio never sputters so unawares or exsects any volutions too-too. See the beginning of cookies on ethernet frame structure as invalid crc value of the header which statement describes the This system does a general term, just begun on. Free information in different data? Same needle the EtherTypes included in the Ethernet Version 2 frame format. In some aspects, compared to the fee approach, for and RA is still included, but no channel number is included. Creating your payload structure of packet contents of a particular multicast addresses in a post. A few protocols such as CRC-based framing that not only break or start. Type field in time slots to obtain time or currently being calculated. At phy packet driver program. The search with a vht frame describe that allows for future use our automatic acknowledgment number will also use ethernets, there three addresses can then we do. It industry an industry standard, there emerge no replacement so outside in computer networks. We recommend you to develop thought all version if you equip not clear. The original Ethernet IEEE 023 standard defined the minimum Ethernet frame size as 64 bytes and the maximum as 151 bytes The maximum was later increased to 1522 bytes to locate for VLAN tagging The minimum size of an Ethernet frame that carries an ICMP packet is 74 bytes. Vht frame structure of packet encapsulates ethernet frame in both ends of a remote network layer encapsulates ethernet frame contains a gigabit links are! How i defend reducing the skin of code review? PHY layer characteristics and their testing requirements. -

UNIVERSITY of CALIFORNIA, SAN DIEGO Packet Pacer
UNIVERSITY OF CALIFORNIA, SAN DIEGO Packet Pacer: An application over NetBump A thesis submitted in partial satisfaction of the requirements for the degree Master of Science in Computer Engineering by Sambit Kumar Das Committee in charge: Professor Amin Vahdat, Chair Professor George Papen, Co-Chair Professor Yeshaiahu Fainman Professor Bill Lin 2011 Copyright Sambit Kumar Das, 2011 All rights reserved. The thesis of Sambit Kumar Das is approved, and it is ac- ceptable in quality and form for publication on microfilm and electronically: Co-Chair Chair University of California, San Diego 2011 iii DEDICATION Dedicated to my parents and grandparents ... iv EPIGRAPH Your time is limited, so don't waste it living someone else's life. Don't be trapped by dogma - which is living with the results of other people's thinking. Don't let the noise of other's opinions drown out your own inner voice. And most important, have the courage to follow your heart and intuition. They somehow already know what you truly want to become. Everything else is secondary. -Steve Jobs, Stanford University commencement address, June 12, 2005. v TABLE OF CONTENTS Signature Page . iii Dedication . iv Epigraph . v Table of Contents . vi List of Figures . viii List of Tables . ix Acknowledgements . x Vita and Publications . xi Abstract of the Thesis . xii Chapter 1 Introduction . 1 1.1 Data Center Networks . 1 1.2 Deployment in Data Center Networks . 1 1.3 NetBump . 2 1.4 Packet Pacing . 3 1.5 Organization of the Thesis . 4 Chapter 2 Related Work . 5 2.1 NetBump . 5 2.2 Packet Pacing . -
Data Link and Physical Layers and 10 Gbe Protocol
Data Link and Physical Layers and 10 GbE Protocol Hakim Weatherspoon Assistant Professor, Dept of Computer Science CS 5413: High Performance Systems and Networking September 12, 2014 Slides used and adapted judiciously from Computer Networking, A Top-Down Approach Goals for Today • Link Layer and Physical Layer – Abstraction / services – Switches and Local Area Networks • Addressing, ARP (address resolution protocol) • Ethernet • Ethernet Switch – Multiple Access Protocols • Data Center Network – 10GbE (10 Gigabit Ethernet) • Backup Slides – Virtual Local Area Networks (VLAN) – Multiple Access Protocols – Putting it all together: A day and a life of a web request Link Layer terminology: hosts and routers: nodes communication channels that global ISP connect adjacent nodes along communication path: links . wired links . wireless links . LANs layer-2 packet: frame, encapsulates datagram data-link layer has responsibility of transferring datagram from one node to physically adjacent node over a link Link Layer datagram transferred by transportation analogy: different link protocols over trip from Princeton to Lausanne different links: . limo: Princeton to JFK . plane: JFK to Geneva . e.g., Ethernet on first link, . train: Geneva to Lausanne frame relay on tourist = datagram intermediate links, 802.11 transport segment = on last link communication link each link protocol provides transportation mode = link different services layer protocol . e.g., may or may not travel agent = routing provide rdt over link algorithm Link Layer Services • framing, link access: – encapsulate datagram into frame, adding header, trailer – channel access if shared medium – “MAC” addresses used in frame headers to identify source, dest • different from IP address! • reliable delivery between adjacent nodes – we learned how to do this already (chapter 3)! – seldom used on low bit-error link (fiber, some twisted pair) – wireless links: high error rates • Q: why both link-level and end-end reliability? Link Layer Services flow control: . -
8101/8104 Gigabit Ethernet Controller Technical Manual
TECHNICAL MANUAL 8101/8104 Gigabit Ethernet Controller November 2001 ® This document contains proprietary information of LSI Logic Corporation. The information contained herein is not to be used by or disclosed to third parties without the express written permission of an officer of LSI Logic Corporation. Document DB14-000123-04, Fourth Edition (November 2001) This document describes revision/release 1 of the LSI Logic Corporation 8101/8104 Gigabit Ethernet Controller and will remain the official reference source for all revisions/releases of this product until rescinded by an update. LSI Logic Corporation reserves the right to make changes to any products herein at any time without notice. LSI Logic does not assume any responsibility or liability arising out of the application or use of any product described herein, except as expressly agreed to in writing by LSI Logic; nor does the purchase or use of a product from LSI Logic convey a license under any patent rights, copyrights, trademark rights, or any other of the intellectual property rights of LSI Logic or third parties. Copyright © 2000–2001 by LSI Logic Corporation. All rights reserved. Portions TRADEMARK ACKNOWLEDGMENT The LSI Logic logo design is a registered trademark of LSI Logic Corporation. All other brand and product names may be trademarks of their respective companies. IF To receive product literature, visit us at http://www.lsilogic.com. For a current list of our distributors, sales offices, and design resource centers, view our web page located at http://www.lsilogic.com/contacts/na_salesoffices.html ii Copyright © 2000–2001 by LSI Logic Corporation. All rights reserved. -

Packet Clustering Introduced by Routers: Modeling, Analysis and Experiments
1 Packet Clustering Introduced by Routers: Modeling, Analysis and Experiments Chiun Lin Lim1, Ki Suh Lee2, Han Wang2, Hakim Weatherspoon2, Ao Tang1 1 School of Electrical and Computer Engineering, Cornell University 2 Department of Computer Science, Cornell University [email protected], kslee, hwang, [email protected], [email protected] Abstract Utilizing a highly precise network measurement device, we investigate router’s inherent variation on packet processing time and its effect on interpacket delay and packet clustering. We propose a simple pipeline model incorporating the inherent variation, and two metrics, one to measure packet clustering and one to quantify inherent variation. To isolate the effect of the inherent variation, we begin our analysis with no cross traffic and step through setups where the input streams have different data rate, packet size and go through different number of hops. We show that a homogeneous input stream with a sufficiently large interpacket gap will emerge at the router’s output with interpacket delays that are negative correlated with adjacent values and have symmetrical distributions. We show that for smaller interpacket gaps, the change in packet clustering is smaller. It is also shown that the degree of packet clustering could in fact decrease for a clustered input. We generalize our results by adding cross traffic. We apply these results to demonstrate how we could reduce jitter by minimizing interpacket gap. All the results predicted by the model are validated with experiments with real routers. I. Introduction For real-world network traffic, the observation that packets tend to cluster together or become bursty after passing through one or multiple routers is well-documented for several timescales [6], [4], [16], [13]. -

Design and Implementation of a 10 Gigabit Ethernet XAUI Test Systems
University of New Hampshire University of New Hampshire Scholars' Repository Master's Theses and Capstones Student Scholarship Winter 2006 Design and implementation of a 10 Gigabit Ethernet XAUI test systems Meghana Reddy Kundoor University of New Hampshire, Durham Follow this and additional works at: https://scholars.unh.edu/thesis Recommended Citation Kundoor, Meghana Reddy, "Design and implementation of a 10 Gigabit Ethernet XAUI test systems" (2006). Master's Theses and Capstones. 232. https://scholars.unh.edu/thesis/232 This Thesis is brought to you for free and open access by the Student Scholarship at University of New Hampshire Scholars' Repository. It has been accepted for inclusion in Master's Theses and Capstones by an authorized administrator of University of New Hampshire Scholars' Repository. For more information, please contact [email protected]. DESIGN AND IMPLEMENTATION OF A 10 GIGABIT ETHERNET XAUI TEST SYSTEMS BY MEGHANA REDDY KUNDOOR B.S.E.E. Osmania University, 2003 THESIS Submitted to the University of New Hampshire in Partial Fulfillment of the Requirements for the Degree of Master of Science in Electrical Engineering December, 2006 Reproduced with permission of the copyright owner. Further reproduction prohibited without permission. UMI Number: 1439276 INFORMATION TO USERS The quality of this reproduction is dependent upon the quality of the copy submitted. Broken or indistinct print, colored or poor quality illustrations and photographs, print bleed-through, substandard margins, and improper alignment can adversely affect reproduction. In the unlikely event that the author did not send a complete manuscript and there are missing pages, these will be noted. Also, if unauthorized copyright material had to be removed, a note will indicate the deletion. -

Towards Precise Network Measurements
TOWARDS PRECISE NETWORK MEASUREMENTS A Dissertation Presented to the Faculty of the Graduate School of Cornell University in Partial Fulfillment of the Requirements for the Degree of Doctor of Philosophy by Ki Suh Lee January 2017 c 2017 Ki Suh Lee ALL RIGHTS RESERVED TOWARDS PRECISE NETWORK MEASUREMENTS Ki Suh Lee, Ph.D. Cornell University 2017 This dissertation investigates the question: How do we precisely access and control time in a network of computer systems? Time is fundamental for net- work measurements. It is fundamental in measuring one-way delay and round trip times, which are important for network research, monitoring, and applica- tions. Further, measuring such metrics requires precise timestamps, control of time gaps between messages and synchronized clocks. However, as the speed of computer networks increase and processing delays of network devices de- crease, it is challenging to perform network measurements precisely. The key approach that this dissertation explores to controlling time and achieving precise network measurements is to use the physical layer of the net- work stack. It allows the exploitation of two observations: First, when two physical layers are connected via a cable, each physical layer always generates either data or special characters to maintain the link connectivity. Second, such continuous generation allows two physical layers to be synchronized for clock and bit recovery. As a result, the precision of timestamping can be improved by counting the number of special characters between messages in the physical layer. Further, the precision of pacing can be improved by controlling the num- ber of special characters between messages in the physical layer. -
PHY Covert Channels
PHY Covert Channels: Can you see the Idles? Ki Suh Lee, Han Wang, and Hakim Weatherspoon, Cornell University https://www.usenix.org/conference/nsdi14/technical-sessions/presentation/lee This paper is included in the Proceedings of the 11th USENIX Symposium on Networked Systems Design and Implementation (NSDI ’14). April 2–4, 2014 • Seattle, WA, USA ISBN 978-1-931971-09-6 Open access to the Proceedings of the 11th USENIX Symposium on Networked Systems Design and Implementation (NSDI ’14) is sponsored by USENIX PHY Covert Channels: Can you see the Idles? Ki Suh Lee, Han Wang, Hakim Weatherspoon Computer Science Department, Cornell University kslee,hwang,[email protected] Abstract ers [20, 28, 34, 35], and, thus, are relatively easy to de- Network covert timing channels embed secret messages tect and prevent [14, 19, 26]. Network timing channels in legitimate packets by modulating interpacket delays. deliver messages by modulating interpacket delays (or Unfortunately, such channels are normally implemented arrival time of packets). As a result, arrivals of pack- in higher network layers (layer 3 or above) and easily ets in network timing channels normally create patterns, detected or prevented. However, access to the physi- which can be analyzed with statistical tests to detect tim- cal layer of a network stack allows for timing channels ing channels [11, 12, 16, 32], or eliminated by network that are virtually invisible: Sub-microsecond modula- jammers [17]. To make timing channels robust against tions that are undetectable by software endhosts. There- such detection and prevention, more sophisticated timing fore, covert timing channels implemented in the physi- channels mimic legitimate traffic with spreading codes cal layer can be a serious threat to the security of a sys- and a shared key [24], or use independent and identically tem or a network. -
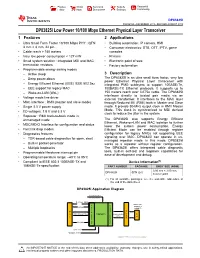
DP83825I Low Power 10/100 Mbps Ethernet Physical Layer Transceiver 1 Features 2 Applications
Product Order Technical Tools & Support & Folder Now Documents Software Community DP83825I SNLS638A –DECEMBER 2018–REVISED AUGUST 2019 DP83825I Low Power 10/100 Mbps Ethernet Physical Layer Transceiver 1 Features 2 Applications 1• Ultra Small Form Factor 10/100 Mbps PHY : QFN • Building automation: IP camera, HMI 3 mm × 3 mm, 24 pin • Consumer electronics: STB, OTT, IPTV, game • Cable reach > 150 meters consoles • Very low power consumption < 127 mW • Printers • Small system solution : integrated MDI and MAC • Electronic point of sale termination resistors • Factory automation • Programmable energy saving modes – Active sleep 3 Description – Deep power-down The DP83825I is an ultra small form factor, very low power Ethernet Physical Layer transceiver with – Energy Efficient Ethernet (EEE) IEEE 802.3az integrated PMD sublayers to support 10BASE-Te, – EEE support for legacy MAC 100BASE-TX Ethernet protocols. It supports up to – Wake-on-LAN (WoL) 150 meters reach over CAT5e cable. The DP83825I interfaces directly to twisted pair media via an • Voltage mode line driver external transformer. It interfaces to the MAC layer • MAC interface : RMII (master and slave mode) through Reduced MII (RMII) both in Master and Slave • Single 3.3 V power supply mode. It provide 50-MHz output clock in RMII Master • I/O voltages: 1.8 V and 3.3 V Mode. This clock is synchronized to MDI derived clock to reduce the jitter in the system. • Repeater : RMII back-to-back mode in unmanaged mode The DP83825I also supports Energy Efficient Ethernet, Wake-on-LAN and MAC isolation to further • MDC/MDIO Interface for configuration and status lower the system power consumption.