A Study of the Combined Socket and Butt Welding of Plastic Pipes Using Through Transmission Infrared Welding
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Welding of Plastics: Fundamentals and New Developments
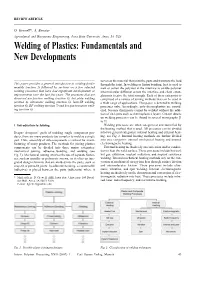
REVIEW ARTICLE D. Grewell*, A. Benatar Agricultural and Biosystems Eingineering, Iowa State University, Ames, IA, USA Welding of Plastics: Fundamentals and New Developments serves as the material that joins the parts and transmits the load This paper provides a general introduction to welding funda- through the joint. In welding or fusion bonding, heat is used to mentals (section 2) followed by sections on a few selected melt or soften the polymer at the interface to enable polymer welding processes that have had significant developments or intermolecular diffusion across the interface and chain entan- improvements over the last few years. The processes that are glements to give the joint strength. Each of these categories is discussed are friction welding (section 3), hot plate welding comprised of a variety of joining methods that can be used in (section 4), ultrasonic welding (section 5), laser/IR welding a wide range of applications. This paper is devoted to welding (section 6), RF welding (section 7) and hot gas/extrusion weld- processes only. Accordingly, only thermoplastics are consid- ing (section 8). ered, because thermosets cannot be welded without the addi- tion of tie-layers such as thermoplastics layers. Greater details on welding processes can be found in several monographs [1 to 4]. 1 Introduction to Joining Welding processes are often categorized and identified by the heating method that is used. All processes can be divided Despite designers’ goals of molding single component pro- into two general categories: internal heating and external heat- ducts, there are many products too complex to mold as a single ing, see Fig. -

A Review of Welding Technologies for Thermoplastic Composites in Aerospace Applications
doi: 10.5028/jatm.2012.04033912 A Review of Welding Technologies for Thermoplastic Composites in Aerospace Applications Anahi Pereira da Costa1, Edson Cocchieri Botelho1,*, Michelle Leali Costa2, Nilson Eiji Narita3, José Ricardo Tarpani4 1 Universidade Estadual Paulista Júlio de Mesquita Filho– Guaratinguetá/SP – Brazil 2 Instituto de Aeronáutica e Espaço – São José dos Campos/SP, Brazil 3 EMBRAER– São José dos Campos/SP, Brazil 4 Universidade de São Paulo – São Carlos/SP, Brazil Abstract: Reinforced thermoplastic structural detail parts and assemblies are being developed to be included in current aeronautic programs. Thermoplastic composite technology intends to achieve improved properties and low cost processes. Welding of detail parts permits to obtain assemblies with weight reduction and cost saving. Currently, joining composite materials is a matter of intense research because traditional joining technologies are not directly transfer- able to composite structures. Fusion bonding and the use of thermoplastic as hot melt adhesives offer an alternative to mechanical fastening and thermosetting adhesive bonding. Fusion bonding technology, which originated from the thermoplastic polymer industry, has gained a new interest with the introduction of thermoplastic matrix composites, which are currently regarded as candidate for primary aircraft structures. This paper reviewed the state of the art of the welding technologies devised to aerospace industry, including the ¿elds that Universidade Estadual Paulista -~lio de Mesquita Filho and -

Butt Joint and Fastener Finishing Guidelines Issue 2
________________________________________________________________________ TECHNICAL BULLETIN No.: 042314-1007 Subject: Butt Joint and Fastener Finish Guideline Issue Date: April 23, 2014 Issue No.: 1 1.0 PURPOSE 1.1 To provide a butt joint and fastener preparation guideline. 2.0 GENERAL 2.1 Magnum Board® can be finished with almost any product on the market today including, but not limited to, Portland type stuccos, synthetic stuccos, stone, brick, fabric finishes and paint. 2.2 When using these products, always follow the Manufacturer’s guidelines for surface preparation and installation. 3.0 RESPONSIBILITY 3.1 It is the responsibility of the installer to ensure the framing to which the Magnum Board® sheathing is to be fastened is square and will provide the finished look desired by the owner and / or contractor. 3.2 It is also the responsibility of the applicator of the above finish product to ensure the installed Magnum Board® is properly prepared to receive the selected finish. 4.0 MATERIAL HANDLING REQUIREMENTS 4.1 Stage materials as close to the point of installation as possible. 4.2 Store Magnum Board® flat and protect it from weather and jobsite dirt before, during and after installation. 4.3 Protect the corners of Magnum Board® prior to and during installation. 4.4 Do not stack other materials on top of Magnum Board®. 1 5.0 MATERIAL REQUIREMENTS 5.1 Premium-grade, high-performance, moisture-cured, 1-component, polyurethane-based, non-sag elastomeric sealant / adhesive such as “Sikaflex 1a” or equal. 5.2 Joint compound. Lightweight exterior spackling can be substituted for fastener finishing. 5.3 Fiberglass joint taper, woven. -

Effect of Different Veneer-Joint Forms and Allocations on Mechanical Properties of Bamboo-Bundle Laminated Veneer Lumber
PEER-REVIEWED ARTICLE bioresources.com Effect of Different Veneer-joint Forms and Allocations on Mechanical Properties of Bamboo-bundle Laminated Veneer Lumber Dan Zhang, Ge Wang,* and Wenhan Ren Bamboo-bundle laminated veneer lumber (BLVL) was produced by veneer lengthening technology. The objective of this study was to evaluate the effect of different veneer-joint forms and allocations on the mechanical properties of BLVL. Four veneer-joint forms, i.e., butt joint, lap joint, toe joint, and tape joint, and three lap-joint allocations, i.e., invariable allocation (Type I), staggered allocation (Type II), and uniform allocation (Type III), were investigated in laminates. The results revealed that the mechanical properties of veneer-joint BLVL were reduced in comparison with that of un-jointed BLVL. It was found that the best veneer-joint form was the lap joint laminate, of which the tensile strength, modulus of elasticity, and modulus of rupture values were reduced by 38.41%, 0.66%, and 10.92%, respectively, when compared to the un- jointed control samples. Type III showed the lowest influence on bending and tensile properties, followed by Type II. Keywords: Bamboo-bundle laminated veneer lumber; Joint forms; Mechanical properties; Joint allocations Contact information: International Centre for Bamboo and Rattan, Beijing, P.R. China, 100102; * Corresponding author: [email protected] INTRODUCTION As wood resource availability declines and its demand increases in today’s modern industrialized world, it is important to explore new, sustainable building materials. In particular, bamboo has recently been recognized as a promising alternative raw material due to its abundance, fast growth rate, and high tensile strength (Jiang et al. -

Beginner's Guide
Hand woodworking Hand woodworking Red oak cut through the cells Stud joined with nails or screws and Mitre joint on a picture frame held with a dowel joint, both examples of using only glue The butt joint mechanical means to joint end grain to I’m going to start with the most basic long grain joint of all: the butt joint. This joint consists of two pieces of wood that a biscuit, mortise and tenon, dowels are simply butted against each other, or pocket screws in addition to glue. typically forming a ‘T’ joint or corner Picture frames are a good example joint in a cabinet face frame or mitred of a butt joint – here you can see the corners of a picture frame or box. result of a butt joint using only glue; The strongest butt joint consists of the wood has started to pull away due joining straight grain to straight, such to seasonal change. With joining end as when joining boards for a tabletop grain to long grain, where the wood is Lapped dovetail or half-blind dovetail – see issue 2, pages 51-54. This is moving at different rates, it is clear that because boards that are cut lengthwise a stronger joint is needed. are often used interchangeably, but preserve the grain structure, whereas while a halving and half lapped joint joining end grain to end grain or end Half-lap, halving joint or is a lapped joint, a lapped joint is not grain to straight grain slices through lap joint always a halved joint. cells that were once strong and the Let’s look at joining wood with another Here you can see a half-blind original strength of the board is lost. -

Silver Brazing Your Own Band Saw Blades
Silver Brazing Your Own BAND SAW BLADES B Y J O H N W ILSO N Save money and get better results by making your own blades. was on the road teaching a woodwork- Silver alloys such as N50 or Easy-Flo 3 about 50 cents a foot. Coils of .025" x 1⁄4" x Iing course recently when my band saw blade are examples available today that contain 6-tooth blade is about 70 cents a foot. Olson broke. Not carrying a spare meant buying a cadmium. Used for decades, we now know doesn’t mention the availability or price of replacement locally. that the cadmium in them creates a health the coils on its web site or in its catalogs; you It had been 20 years since I began silver risk. Cadmium-free alloy such as BRAZE 505 need to call them. brazing my own band saw blades, and I had (visit LucasMilhaupt.com for a brazing book In researching the article I asked folks in forgotten what a broken band saw blade means you can download) contains 50 percent sil- the band saw blade industry about this. Their for woodworkers who don’t. First, there is the ver, 20 percent copper, 28 percent zinc and answer was that their customers had been inconvenience of stopping operations while 2 percent nickel. dissatisfied with the results of their shop- shopping for the blade. Second is the cost. Just as with soft soldering, a suitable paste made blades. The solution, I suggest, is better Third is the disappointment in the poor qual- flux is needed to ensure joint surfaces that information. -

Woodworking Joints.Key
Woodworking making joints Using Joints Basic Butt Joint The butt joint is the most basic woodworking joint. Commonly used when framing walls in conventional, stick-framed homes, this joint relies on mechanical fasteners to hold the two pieces of stock in place. Learn how to build a proper butt joint, and when to use it on your woodworking projects. Basic Butt Joint The simplest of joints is a butt joint - so called because one piece of stock is butted up against another, then fixed in place, most commonly with nails or screws. The addition of glue will add some strength, but the joint relies primarily upon its mechanical fixings. ! These joints can be used in making simple boxes or frames, providing that there will not be too much stress on the joint, or that the materials used will take nails or screws reliably. Butt joints are probably strongest when fixed using glued dowels. Mitered Butt Joint ! A mitered butt joint is basically the same as a basic butt joint, except that the two boards are joined at an angle (instead of square to one another). The advantage is that the mitered butt joint will not show any end grain, and as such is a bit more aesthetically pleasing. Learn how to create a clean mitered butt joint. Mitered Butt Joint The simplest joint that requires any form of cutting is a miter joint - in effect this is an angled butt joint, usually relying on glue alone to construct it. It requires accurate 45° cutting, however, if the perfect 90° corner is to result. -

Fire-Resistant Performance of a Laminated Veneer Lumber Joint with Metal Plate Connectors Protected with Graphite Phenolic Sphere Sheeting
J Wood Sci (2001) 47:19%207 The Japan Wood Research Society 2001 Bambang Subyakto Toshimitsu Hata Isamu Ide Shuichi Kawai Fire-resistant performance of a laminated veneer lumber joint with metal plate connectors protected with graphite phenolic sphere sheeting Received: February 23, 2000 / Accepted: June 16, 2000 Abstract Creep under fire of laminated veneer lumber natural forests decline. Among these materials, laminated (LVL) joined with metal connectors was studied. The fire- veneer lumber (LVL) and oriented strand board (OSB) are resistant performance of LVL butt joints connected with promising as substitutes for structural timber and plywood, metal plates protected with graphite phenolic sphere (GPS) respectively. The application of such products as building sheeting was discussed. The GPS sheeting was overlaid on materials depends, among other factors, on their fire- the joint in different sizes and locations. The joint was resistant performance. exposed to a burner with a top flame temperature of 800~ The fire resistant performance of structural timber is and loaded with a load of 200N to test for creep under fire. important. Timber joints connected with metal plates are The results showed that the fire-resistant performance of considered a weak point in a structure exposed to fire} the joint was markedly improved by the sheeting. The size Several studies have been conducted on the properties of and location of the GPS sheet significantly affected the time metal plate connectors, 2'3 reinforced joints, 4 and structural to rupture of the specimen, which was six times longer than timber under fire. 5 Some studies also have been reported that without GPS. -

Decking Installation & Maintenance Guide
Decking Installation & Maintenance Guide TimberTech PRO™, TimberTech EDGE™, and Specialty Decking Installing TimberTech® Decking .................................................................................... 2 Fastening Methods ........................................................................................................ 4 TimberTech® Square Shouldered Boards ...................................................................... 5 Trimming a TimberTech® Deck ..................................................................................... 6 CONCEALoc® Hidden Fasteners .................................................................................... 7 Cortex® Hidden Fastening System .............................................................................. 10 Care and Cleaning ....................................................................................................... 12 Warranty ...................................................................................................................... 13 Notes ........................................................................................................................... 14 decking | railing | lighting | fastening TimberTech.com Installing TimberTech® Decking TimberTech Decking should be installed using the same good building principals used to install wood or composite decking and Tools Required in accordance with the local building codes and the installation guidelines included below. AZEK® Building Products Inc. accepts no TimberTech boards -
Weldability of Linear Vibration Welded Dissimilar Amorphous Thermoplastics for Automotive External Lighting Applications
University of Windsor Scholarship at UWindsor Electronic Theses and Dissertations Theses, Dissertations, and Major Papers 10-30-2020 Weldability of Linear Vibration Welded Dissimilar Amorphous Thermoplastics for Automotive External Lighting Applications Stephen Daniel Austin Passador University of Windsor Follow this and additional works at: https://scholar.uwindsor.ca/etd Recommended Citation Passador, Stephen Daniel Austin, "Weldability of Linear Vibration Welded Dissimilar Amorphous Thermoplastics for Automotive External Lighting Applications" (2020). Electronic Theses and Dissertations. 8465. https://scholar.uwindsor.ca/etd/8465 This online database contains the full-text of PhD dissertations and Masters’ theses of University of Windsor students from 1954 forward. These documents are made available for personal study and research purposes only, in accordance with the Canadian Copyright Act and the Creative Commons license—CC BY-NC-ND (Attribution, Non-Commercial, No Derivative Works). Under this license, works must always be attributed to the copyright holder (original author), cannot be used for any commercial purposes, and may not be altered. Any other use would require the permission of the copyright holder. Students may inquire about withdrawing their dissertation and/or thesis from this database. For additional inquiries, please contact the repository administrator via email ([email protected]) or by telephone at 519-253-3000ext. 3208. Weldability of Linear Vibration Welded Dissimilar Amorphous Thermoplastics for Automotive -

System for Automatic Inspection of Bandsaw Blades
WSEAS TRANSACTIONS on ENVIRONMENT and DEVELOPMENT Tomas Sysala, Karel Stuchlik, Petr Neumann System for Automatic Inspection of Bandsaw Blades TOMAS SYSALA1, KAREL STUCHLIK1, and PETR NEUMANN2 1 Department of Automation and Control Engineering 2 Department of Electronics and Measurements Tomas Bata University in Zlin, Faculty of Applied Informatics Nad Stranemi 4511, 760 05 Zlin CZECH REPUBLIC [email protected] https://fai.utb.cz/ Abstract: - The article deals with a new inspection method for the bandsaw blade eligibility checking. For better understanding, the individual bandsaw blade areas are described together with relevant parameters overview. The method design description follows. The current method drawback are discussed, and there are stressed the advantages of our innovative automatic inspection method. We present arrangement of our design in individual blocks together with the application software functions. The article also presents both the design model and the realised prototype measurement results. The constructed device based on our design minimizes the human error influence. Key-Words: - Programmable Logic Controler, HMI, Bandsaw, Automatic Inspection, Simatic, SCADA 1 Introduction 2 Bandsaws Wood is one of oldest materials exploited in human Bandsaws are belonging to woodworking tools. activities. In spite of fact that it has been replaced in Those tools are employed for example in sawmills many areas with plastic materials, with iron and for tree trunk cutting in lumber like flitches, logs, with concrete, it it is still a favourite material planks or slabs. [1, 2] because of its specific characteristic. The bandsaw development started in 1808 thanks Various saw types serve for wood priming and to the Englishman William Newberry who received shaping. -

LAP SIDING Basic Installation Guide for Complete Installation Instructions, Go to Allurausa.Com
LAP SIDING Basic Installation Guide For complete installation instructions, go to AlluraUSA.com DOs DON’Ts BEFORE • Use these tips as a guide, not as a replacement for the Allura • Do not install questionable 1 YOU BEGIN Fiber Cement Installation Manual which can be downloaded product. Contact Allura at www.allurausa.com under the Resources Tab in the Consumer Service at Technical section. Review the manual in its entirety and all 1-844-4ALLURA applicable building codes prior to installation. • Wear appropriate safety equipment—dust mask or respirator, eye protection, hard hat, and cut-resistant gloves as appropriate. STORAGE & • Keep siding covered, off the ground on a clean, flat, and level • Never install siding that is wet. 2 HANDLING surface that is protected from direct exposure to weather. • Carry lap siding by its narrow edge. SHEATHING • Lap siding must be installed to structural framing when using • Do not fasten fiber cement 3 & WRAPS non-structural sheathing, builder board, foam-type sheathings siding over non-structural and gypsum board. sheathing thicker than 1" • Siding must be applied over a water-resistant barrier without re-establishing a in accordance with local building code. structural fastening surface. CUTTING • Use appropriate personal protective equipment (PPE). • Do not score and snap 4 Refer to the Fiber Cement Installation Manual for details. fiber cement. • Cut fiber cement outdoors when possible. • Do not cut fiber cement • Use a polycrystalline diamond-tipped fiber cement blade without proper ventilation. for circular, miter, and table saws. Face down • When using a circular saw or mechanical shears, cut fiber cement siding face down.