Plastics and Composites Welding Handbook
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
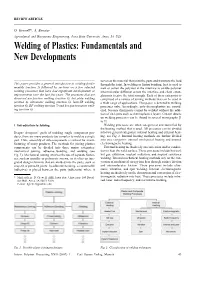
Welding of Plastics: Fundamentals and New Developments
REVIEW ARTICLE D. Grewell*, A. Benatar Agricultural and Biosystems Eingineering, Iowa State University, Ames, IA, USA Welding of Plastics: Fundamentals and New Developments serves as the material that joins the parts and transmits the load This paper provides a general introduction to welding funda- through the joint. In welding or fusion bonding, heat is used to mentals (section 2) followed by sections on a few selected melt or soften the polymer at the interface to enable polymer welding processes that have had significant developments or intermolecular diffusion across the interface and chain entan- improvements over the last few years. The processes that are glements to give the joint strength. Each of these categories is discussed are friction welding (section 3), hot plate welding comprised of a variety of joining methods that can be used in (section 4), ultrasonic welding (section 5), laser/IR welding a wide range of applications. This paper is devoted to welding (section 6), RF welding (section 7) and hot gas/extrusion weld- processes only. Accordingly, only thermoplastics are consid- ing (section 8). ered, because thermosets cannot be welded without the addi- tion of tie-layers such as thermoplastics layers. Greater details on welding processes can be found in several monographs [1 to 4]. 1 Introduction to Joining Welding processes are often categorized and identified by the heating method that is used. All processes can be divided Despite designers’ goals of molding single component pro- into two general categories: internal heating and external heat- ducts, there are many products too complex to mold as a single ing, see Fig. -
PVC Linings Provide Better Corrosion Protection with Improved Welding Technique
Material Matters PVC linings provide better corrosion protection with improved welding technique In the process industry, such as metal finishing, PVC linings are com- monly used as corrosion barriers to protect the interiors of steel tanks or concrete pits, which typically contain chemicals that are extremely corrosive, says NACE International member Cur- tis Goad, president and owner of GOAD COMPANY, a provider of custom-designed tank lining systems for the surface finishing and chemical pro- cessing industries. Open rectangular tanks and pits, as well as secondary containment areas, are typically used in surface processing such as electroplat- ing, he says, and often are lined with high-performance plasticized (flexible) PVC sheets that are bonded with adhe- sive to side walls and bottoms and sealed at the seams and corners by thermoplastic welding. The thermoplastic welding process melts the plastic welding material (rod or strip) to its molten state as well as preheats the PVC lining sheets, and applies pressure to both the welding material and the sheets to allow the molecules to fuse into a solid when cooled. Welding techniques for plastics include hot gas/hot air welding, where a hand-held welding device uses heated nitrogen gas or air to soften both the An operator uses a thermoplastic hot welding technique de- plastic welding rod or strip and the gas/hot air extrusion welding machine veloped by GOAD sheets to be joined while an operator to join PVC lining sheets. Photo COMPANY (Ellisville, moves the device along the seam. courtesy of Curtis Goad. Missouri) improves the In one method of hot gas/hot air welding, known as hand welding, an thermoplastic welding operator uses a welding gun to lay a Aprocess for polyvinyl chloride bead of material along the seam where (PVC) linings and helps prevent the base materials touch. -

A Review of Welding Technologies for Thermoplastic Composites in Aerospace Applications
doi: 10.5028/jatm.2012.04033912 A Review of Welding Technologies for Thermoplastic Composites in Aerospace Applications Anahi Pereira da Costa1, Edson Cocchieri Botelho1,*, Michelle Leali Costa2, Nilson Eiji Narita3, José Ricardo Tarpani4 1 Universidade Estadual Paulista Júlio de Mesquita Filho– Guaratinguetá/SP – Brazil 2 Instituto de Aeronáutica e Espaço – São José dos Campos/SP, Brazil 3 EMBRAER– São José dos Campos/SP, Brazil 4 Universidade de São Paulo – São Carlos/SP, Brazil Abstract: Reinforced thermoplastic structural detail parts and assemblies are being developed to be included in current aeronautic programs. Thermoplastic composite technology intends to achieve improved properties and low cost processes. Welding of detail parts permits to obtain assemblies with weight reduction and cost saving. Currently, joining composite materials is a matter of intense research because traditional joining technologies are not directly transfer- able to composite structures. Fusion bonding and the use of thermoplastic as hot melt adhesives offer an alternative to mechanical fastening and thermosetting adhesive bonding. Fusion bonding technology, which originated from the thermoplastic polymer industry, has gained a new interest with the introduction of thermoplastic matrix composites, which are currently regarded as candidate for primary aircraft structures. This paper reviewed the state of the art of the welding technologies devised to aerospace industry, including the ¿elds that Universidade Estadual Paulista -~lio de Mesquita Filho and -

A Research Paper on the Fundamentals of Plastic Welding
ISSN (Online) 2394-2320 International Journal of Engineering Research in Computer Science and Engineering (IJERCSE) Vol 4, Issue 8, August 2017 A Research Paper on the Fundamentals of Plastic Welding [1] S Kennedy [1] Department of Mechanical Engineering, Galgotias University, Yamuna Expressway Greater Noida, Uttar Pradesh Email id- [email protected] Abstract: Plastic is a material including a wide scope of semi-engineered or manufactured organics that are malleable and can be formed into strong objects of various shapes. Today, joining of thermoplastic composite structures is getting increasingly huge since thermoplastic composite materials are being utilized to supplant metallic or thermoset composite material to all the more likely withstand different loads in car, aviation, rural apparatuses and marine businesses. Plastic welding is accounted for in ISO 472 as a procedure of joining mollified surfaces of materials, with the assistance of warmth. Welding of thermoplastics is practiced in three progressive stages, as follows surface planning, utilization of warmth or potentially weight, and cooling. Various welding techniques have been developed for the joining of plastic materials. This paper presents advancement one of the tourist plastic welding where the sight- seeing is utilized to circuit or soften a filler thermoplastic pole and at the same time heat the surfaces to be joined. If there should arise an occurrence of hot-gas welding the parameters of welding, for example, welding temperature, stream rate, feed rate, welding power, gas, edge, filler bar, Pressure of tourist/gas, Gap separation and shoe impact the quality of the welded joint. The presentation of the above created machine was completed by getting ready seven examples of fluctuating welding, feed rate keeping different parameters steady all through the analyses. -
Weldability of Linear Vibration Welded Dissimilar Amorphous Thermoplastics for Automotive External Lighting Applications
University of Windsor Scholarship at UWindsor Electronic Theses and Dissertations Theses, Dissertations, and Major Papers 10-30-2020 Weldability of Linear Vibration Welded Dissimilar Amorphous Thermoplastics for Automotive External Lighting Applications Stephen Daniel Austin Passador University of Windsor Follow this and additional works at: https://scholar.uwindsor.ca/etd Recommended Citation Passador, Stephen Daniel Austin, "Weldability of Linear Vibration Welded Dissimilar Amorphous Thermoplastics for Automotive External Lighting Applications" (2020). Electronic Theses and Dissertations. 8465. https://scholar.uwindsor.ca/etd/8465 This online database contains the full-text of PhD dissertations and Masters’ theses of University of Windsor students from 1954 forward. These documents are made available for personal study and research purposes only, in accordance with the Canadian Copyright Act and the Creative Commons license—CC BY-NC-ND (Attribution, Non-Commercial, No Derivative Works). Under this license, works must always be attributed to the copyright holder (original author), cannot be used for any commercial purposes, and may not be altered. Any other use would require the permission of the copyright holder. Students may inquire about withdrawing their dissertation and/or thesis from this database. For additional inquiries, please contact the repository administrator via email ([email protected]) or by telephone at 519-253-3000ext. 3208. Weldability of Linear Vibration Welded Dissimilar Amorphous Thermoplastics for Automotive -

GUIDELINES for WELDING THERMOPLASTIC MATERIALS (Hot Gas Hand and Hot Gas Extrusion Welding)
16W301 S Frontage Rd Burr Ridge, IL 60527 630-789-0990, FAX 630-789-1380 www.wegenerwelding.com GUIDELINES FOR WELDING THERMOPLASTIC MATERIALS (Hot Gas Hand and Hot Gas Extrusion Welding) TABLE OF CONTENTS I COMMON THERMOPLASTICS AND WELDING TECHNIQUES II HOT GAS (AIR) WELDING 1 The Process in General 2 The Hot Gas (Air) Generating Equipment 3 Material Preparation 4 Tack Welding 5 High Speed Welding 6 Free Hand or Fan Welding 7 Weld Design 8 Heat Stress Problems III HOT GAS (AIR) EXTRUSION WELDING 1 General 2 Equipment and Procedure 3 Visual Check of the Final Weld IV TESTING V TEMPERATURE RECOMMENDATIONS VI BEAD SIZE RECOMMENDATIONS The information contained within are mere guidelines for welding thermoplastic materials. More detailed information is available through DVS standards established by the GERMAN WELDING SOCIETY. Please contact our company for further information. 16W301 S Frontage Rd Burr Ridge, IL 60527 630-789-0990, FAX 630-789-1380 www.wegenerwelding.com I. COMMON THERMOPLASTICS AND WELDING TECHNIQUES There are a number of methods to weld thermoplastics, which include hot gas (air) hand welding, hot gas (air) extrusion welding, butt fusion (heated element welding), friction welding, laser welding and high frequency welding. In the following, hot gas (air) hand welding and hot gas (air) extrusion welding are being addressed since they play a major role in the field of custom thermoplastic fabrication. A further application for these techniques is the modification or repair of rotationally molded, blow molded, vacuum formed or injection molded parts. The most commonly welded thermoplastic materials are Polypropylene - PP Polyethylene - PE Polyvinylchloride - PVC Chlorinated Polyvinylchloride - CPVC Polyvinyldenefluoride - PVDF Other materials such as ABS, PS, PC and PMMA are welded on a more limited basis and are not covered here in any detail. -

Work.Info – Welding 10/2017 1 Contents
work .info Welding work.info – Welding 10/2017 1 Contents 1 Foreword 3 9 Standards and references 28 9.1 DVS Information sheets 28 2 Hot-gas welding 4 9.2 DIN Standards 29 2.1 Workplace 4 9.3 VDI Guidelines 29 2.2 Weld seam preparation 4 9.4 KRV Guidelines 29 2.3 Welding process 4 9.5 References 29 2.4 Welding defects 6 2.5 Rework on the weld seam 6 10 Appendix 30 2.6 Weldability of various types of material 7 Recommended figures for welding of SIMONA® Sheets and Pipes 31 3 Heated-tool welding 8 Welding records 45 3.1 Fold welding 9 Notes 50 3.2 Processes for pipes and fittings 10 3.2.1 Heated-tool butt welding 11 11 Legal note and advice 51 3.2.2 Heated-tool socket welding 13 SIMONA worldwide 52 4 Electrofusion welding 14 4.1 Basic conditions 14 4.2 Weld seam preparation 14 4.3 Welding process 14 5 Friction welding 15 5.1 Process 15 5.2 Weld seam preparation 15 5.3 Welding process 15 6 Extrusion welding 17 6.1 Weld seam preparation 17 6.2 Temperature 17 6.3 Influence of moisture 18 6.4 Equipment 19 6.5 Rework on the weld seam 20 6.6 Avoidance of void formation in the welded seam 21 6.7 Types of seam 21 6.8 Variables enabling flawless weld seams 22 7 Testing weld seam strength 23 7.1 Manual testing 23 7.2 Weld factor (tensile test) 23 7.3 Technological bending test 24 8 Welded joints 26 8.1 Structural strength of welded joints 26 8.2 Position of weld seams 27 2 work.info – Welding 10/2017 1 Foreword The term plastic welding means the permanent joining of Only plastics of the same kind, e. -

Fabrication and Analysis of Thermo Plastics Welding
ISSN(Online) : 2319 - 8753 ISSN (Print) : 2347 - 6710 International Journal of Innovative Research in Science, Engineering and Technology (An ISO 3297: 2007 Certified Organization) Vol. 4, Special Issue 6, May 2015 Fabrication and Analysis of Thermo Plastics Welding S.Harikannan 1, K.Kannan 2, V.Arun 3, R.Anusundar 4, S.Ashokraj 5 Lecturer, Department of Civil Engineering, Muthayammal Engineering College, Kakaveri ,Rasipuram, India1 Assistant Professor, Department of Mechanical Engineering, Muthayammal Engineering College, Kakaveri , Rasipuram, India2 U.G. Student, Department of Mechanical Engineering, Muthayammal Engineering College, Kakaveri ,Rasipuram, India3 U.G. Student, Department of Mechanical Engineering, Muthayammal Engineering College, Kakaveri ,Rasipuram, India4 U.G. Student, Department of Mechanical Engineering, Muthayammal Engineering College, Kakaveri ,Rasipuram, India5 I. INTRODUCTION Plastic welding is also called as heat sealing, which is the process for welding or joining plastic work pieces. Thermoplastics like Polyethylene, Polypropylene, Polyvinyl Chloride, Polyurethane and Acrylonitrile Butadiene Styrene (ABS) are frequently used in plastic welding. Plastics that can be welded are called “thermoplastics” and when they are heated to a sufficiently high temperature they will soften and welded. INFRAREDLAMP WELDING OF THERMOPLASTICS This technique is also capable of handling large surface area products, as it is a simple operation to add more emitters to the heating bank Infrared lamp welding The newly developed, high power short wave infrared emitter is also proving more efficient and effective than infrared emitters previously considered for welding applications. Its high power density, developed at a lower operating temperature, means that it can transfer energy more efficiently than halogen emitters, while its lower mass filament makes it more responsive than ceramic emitters. -
Approvals and Standards 3Rd Party Control and Standards Double Containment Piping System General Information Connection System L
Index Material Properties General properties page 103 - 107 Material Properties Specific properties page 108 - 110 Applications page 111 Pressure curves and component operating pressures page 112 - 123 Creep modulus curves page 124 - 128 Permissible buckling pressures page 129 - 132 Behaviour at abrasive fluids page 133 Chemical resistancy page 134 - 136 Installation Guidelines Transport, Handling, Storage page 137 Installation Guidelines General installation guidelines page 138 Machining page 139 Calculation Guidelines System of units page 140 SDR, Component operating pressure page 141 Operating pressure for water dangerous media page 142 Wall thickness, External pressure, necessary stiffening for page 143 - 145 pipes with buckling strain Pipe cross section, Determination of the hydraulic pressure page 146 - 149 Calculation Guidelines loss Flow Nomogramm page 150 Dog bone load page 151 Support distances, Support distance at fixed piping page 152 - 158 systems, Change in length, Minimum straight length Buried piping systems page 159 - 160 Connection Methods General standard, Application limits page 161 - 162 Connection Methods Heating element butt welding, pressure test page 163 - 173 Non-contact butt welding (IR-welding) page 174 Heating element socket welding page 175 - 178 Electrofusion welding page 179 - 184 Hot gas welding page 185 - 188 Extrusion welding page 189 - 191 Detachable joints page 192 Double Containment Piping System General Information page 193 - 194 Connection System page 195 - 197 Double Containment Piping Leakage Detection System page 198 Installation page 199 - 201 Approvals and Standards 3rd party control and standards page 202 - 203 German page 1 - 102 Approvals and Standards Material Properties General properties of PE Advantages of PE (Polyehylene) Material Properties z UV-resistance (black PE) Material Properties As a result of continuous development of PE z Flexibility molding materials, the efficiency of PE pipes and z Low specific weight of app. -

Infrared Welding
Infrared Welding Content Process description 1. Introduction 2. Process 3. Advantages of infrared heating up 4. Infrared radiator units (IR) 4.1 Short - wave radiator 4.2 Bat - wing radiator 4.3 Metal - foil radiator 5. KLN infrared welding machine technologie 5.1 Vibration welding machines with integrated pre-heating 5.1.1 The LVW Program 5.2 Hotplate welding machines - infrared machines 6. Summary KLN Ultraschall AG page 1 02/2014 Infrared Welding Process description 1. Introduction For welding by means of infrared technology short-wave (0,78-2 µm) as well as medium-wave (2-4 µm) infrared radiation of the spectrum can be used. This depends particularly on the radiation absorption capacity of the respective polymer material. The more precisely the radiator is adapted to the absorption capacity of the polymer material, the higher is the degree of efficiency, that means the conversion into warmth. Short waves are absorbed in deeper layers of the material, whereas medium waves heat it up more at the surface. Additives like carbon black lead to absorption of the largest part of energy at the surface. Since in most cases short-waves have a higher capacity (Watt/cm radiator length) and medium-wave metal-foil radiators are absorbed at the surface, the material surface can be impaired thermally. The parameters, capacity, radiation time and distance must be adjusted and optimized accordingly. The nearer the radiation source is positioned at the spot to be heated up and the better the ray is focussed, the faster the material will be heated up. 2. Process The welding process is very similar to that of hot plate welding (please see picture). -

Plastic Pipes in the Industry: the Right Choice! Legal Details / Editor
Plastic Pipes in the Industry: The right choice! Legal details / Editor: Kunststoffrohrverband e.V. Kennedyallee 1-5 53175 Bonn Germany Phone: +49-(0)2 28 / 9 14 77-0 Fax: +49-(0)2 28 / 9 14 77-19 e-mail: [email protected] Web: http://www.krv.de oder http://www.wipo.krv.de 2 Contents Introduction Page 4 General requirements for piping systems in the chemical process Page 5 industry (CPI) The chemical resistance of plastic pipes Page 6 Standardization / Quality assurance / Approval Page 7 Sustainability Page 8 Materials Page 10 Jointing techniques Page 15 Special Requirements of Plastics Page 18 Versatile piping concept Page 19 Examples of applications Page 20 Quo vadis industrial piping? Page 24 The Kunststoffrohrverband e.V. Page 25 Members of industrial pipes group Page 26 3 Einleitung Seit nunmehr 60 Jahren bestimmen Kunst- stoffe unseren Alltag. Ein modernes Auto ist ohne Kunststoff undenkbar, Verpa- ckungsfolien schützen unsere Nahrungs- mittel, Kunststoffrohre transportieren Gas und Wasser. Hochleistungsfolien versie- geln Deponien und feinste Kunststofffasern Introduction sind die Basis für moderne Sport- und During the last 60 years plastics have changed our lives High performance geomembranes secure durable sealing of Funktionskleidung. more than we could ever have imagined. A modern car con- landfills and plastic fibres represent the basis for modern structed without any plastics is unthinkable, packaging films sportswear respectively functional clothing. prevent our food from spoiling and gas as well as water are conveyed through plastic pipes. Bild: BMW Amaturentafel Bild: High Voltage Kabel Wesentliche Bedeutung haben die Kunststoffe für die chemische Industrie. Vor ca. 60Jahren wurden die ersten Kunststoffrohre in Frankfurt bei der Fa. -
INFORMATION to USERS This Manuscript Has Been Reproduced
INFORMATION TO USERS This manuscript has been reproduced from the microfilm master. UMI films the text directly from the original or copy submitted. Thus, some thesis and dissertation copies are in typewriter face, while others may be from any type of computer printer. The quality of this reproduction is dependent upon the quality of the copy submitted. Broken or indistinct print, colored or poor quality illustrations and photographs, print bleed through, substandard margins, and improper alignment can adversely affect reproduction. In the unlikely event that the author did not send UMI a complete manuscript and there are missing pages, these will be noted. Also, if unauthorized copyright material had to be removed, a note will indicate the deletion. Oversize materials (e.g., maps, drawings, charts) are reproduced by sectioning the original, beginning at the upper left-hand comer and continuing from left to right in equal sections with small overlaps. Each original is also photographed in one exposure and is included in reduced form at the back of the book. Photographs included in the original manuscript have been reproduced xerographically in this copy. Higher quality 6" x 9" black and white photographic prints are available for any photographs or illustrations appearing in this copy for an additional charge. Contact UMI directly to order. A Bell & Howell Information Company 300 North Z eeb Road. Ann Arbor. Ml 48106-1346 USA 313.'761-4700 800/521-0600 INFRARED HEATING AND WELDING OF THERMOPLASTICS AND COMPOSITES DISSERTATION Presented in Partial Fulfillment of the Requirements for the Degree Doctor of Philosophy in the Graduate School of the Ohio State University By Yang Shiau Chen, B.S., M.S.