Download This Article in PDF Format
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

100 Closest Stars Designation R.A
100 closest stars Designation R.A. Dec. Mag. Common Name 1 Gliese+Jahreis 551 14h30m –62°40’ 11.09 Proxima Centauri Gliese+Jahreis 559 14h40m –60°50’ 0.01, 1.34 Alpha Centauri A,B 2 Gliese+Jahreis 699 17h58m 4°42’ 9.53 Barnard’s Star 3 Gliese+Jahreis 406 10h56m 7°01’ 13.44 Wolf 359 4 Gliese+Jahreis 411 11h03m 35°58’ 7.47 Lalande 21185 5 Gliese+Jahreis 244 6h45m –16°49’ -1.43, 8.44 Sirius A,B 6 Gliese+Jahreis 65 1h39m –17°57’ 12.54, 12.99 BL Ceti, UV Ceti 7 Gliese+Jahreis 729 18h50m –23°50’ 10.43 Ross 154 8 Gliese+Jahreis 905 23h45m 44°11’ 12.29 Ross 248 9 Gliese+Jahreis 144 3h33m –9°28’ 3.73 Epsilon Eridani 10 Gliese+Jahreis 887 23h06m –35°51’ 7.34 Lacaille 9352 11 Gliese+Jahreis 447 11h48m 0°48’ 11.13 Ross 128 12 Gliese+Jahreis 866 22h39m –15°18’ 13.33, 13.27, 14.03 EZ Aquarii A,B,C 13 Gliese+Jahreis 280 7h39m 5°14’ 10.7 Procyon A,B 14 Gliese+Jahreis 820 21h07m 38°45’ 5.21, 6.03 61 Cygni A,B 15 Gliese+Jahreis 725 18h43m 59°38’ 8.90, 9.69 16 Gliese+Jahreis 15 0h18m 44°01’ 8.08, 11.06 GX Andromedae, GQ Andromedae 17 Gliese+Jahreis 845 22h03m –56°47’ 4.69 Epsilon Indi A,B,C 18 Gliese+Jahreis 1111 8h30m 26°47’ 14.78 DX Cancri 19 Gliese+Jahreis 71 1h44m –15°56’ 3.49 Tau Ceti 20 Gliese+Jahreis 1061 3h36m –44°31’ 13.09 21 Gliese+Jahreis 54.1 1h13m –17°00’ 12.02 YZ Ceti 22 Gliese+Jahreis 273 7h27m 5°14’ 9.86 Luyten’s Star 23 SO 0253+1652 2h53m 16°53’ 15.14 24 SCR 1845-6357 18h45m –63°58’ 17.40J 25 Gliese+Jahreis 191 5h12m –45°01’ 8.84 Kapteyn’s Star 26 Gliese+Jahreis 825 21h17m –38°52’ 6.67 AX Microscopii 27 Gliese+Jahreis 860 22h28m 57°42’ 9.79, -

Abstract a Search for Extrasolar Planets Using Echoes Produced in Flare Events
ABSTRACT A SEARCH FOR EXTRASOLAR PLANETS USING ECHOES PRODUCED IN FLARE EVENTS A detection technique for searching for extrasolar planets using stellar flare events is explored, including a discussion of potential benefits, potential problems, and limitations of the method. The detection technique analyzes the observed time versus intensity profile of a star’s energetic flare to determine possible existence of a nearby planet. When measuring the pulse of light produced by a flare, the detection of an echo may indicate the presence of a nearby reflective surface. The flare, acting much like the pulse in a radar system, would give information about the location and relative size of the planet. This method of detection has the potential to give science a new tool with which to further humankind’s understanding of planetary systems. Randal Eugene Clark May 2009 A SEARCH FOR EXTRASOLAR PLANETS USING ECHOES PRODUCED IN FLARE EVENTS by Randal Eugene Clark A thesis submitted in partial fulfillment of the requirements for the degree of Master of Science in Physics in the College of Science and Mathematics California State University, Fresno May 2009 © 2009 Randal Eugene Clark APPROVED For the Department of Physics: We, the undersigned, certify that the thesis of the following student meets the required standards of scholarship, format, and style of the university and the student's graduate degree program for the awarding of the master's degree. Randal Eugene Clark Thesis Author Fred Ringwald (Chair) Physics Karl Runde Physics Ray Hall Physics For the University Graduate Committee: Dean, Division of Graduate Studies AUTHORIZATION FOR REPRODUCTION OF MASTER’S THESIS X I grant permission for the reproduction of this thesis in part or in its entirety without further authorization from me, on the condition that the person or agency requesting reproduction absorbs the cost and provides proper acknowledgment of authorship. -

Planets and Exoplanets
NASE Publications Planets and exoplanets Planets and exoplanets Rosa M. Ros, Hans Deeg International Astronomical Union, Technical University of Catalonia (Spain), Instituto de Astrofísica de Canarias and University of La Laguna (Spain) Summary This workshop provides a series of activities to compare the many observed properties (such as size, distances, orbital speeds and escape velocities) of the planets in our Solar System. Each section provides context to various planetary data tables by providing demonstrations or calculations to contrast the properties of the planets, giving the students a concrete sense for what the data mean. At present, several methods are used to find exoplanets, more or less indirectly. It has been possible to detect nearly 4000 planets, and about 500 systems with multiple planets. Objetives - Understand what the numerical values in the Solar Sytem summary data table mean. - Understand the main characteristics of extrasolar planetary systems by comparing their properties to the orbital system of Jupiter and its Galilean satellites. The Solar System By creating scale models of the Solar System, the students will compare the different planetary parameters. To perform these activities, we will use the data in Table 1. Planets Diameter (km) Distance to Sun (km) Sun 1 392 000 Mercury 4 878 57.9 106 Venus 12 180 108.3 106 Earth 12 756 149.7 106 Marte 6 760 228.1 106 Jupiter 142 800 778.7 106 Saturn 120 000 1 430.1 106 Uranus 50 000 2 876.5 106 Neptune 49 000 4 506.6 106 Table 1: Data of the Solar System bodies In all cases, the main goal of the model is to make the data understandable. -
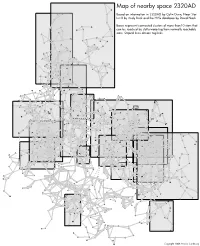
Map Showing the Clusters That Can Be Reached Using One
Castor cluster HYG 542 6.3 7.2 Map of nearby space 2320AD HD 145 3.8 Beta Tucanae cluster HYG 664 HD 2749 6.6 13 Cas Based on information in 2320AD by Colin Dunn, Near Star 6.3 5.8 5.7 List II by Andy Brick and the HYG database by David Nash. Bet1TucBet2Tuc HD 164181 7.3 6.76.7 5.8 HD 2785 7.1 HD 2712 Boxes represent connected clusters of more than10 stars that HD 2779 3.8 4.8 HD 2665155 HD 417 7.2 HD 183 HD 2784 7.2 7.2 HD 336 can be reached by stutterwarp tug from normally reachable HD 375 HYG 716 2.8 7.27.1 5.2 HD 442 7.1 HD 446 7.5 stars. Striped lines denote tug-links. 7.2 6.0 HD 135 5.6 5.9 7.3 HD 2589 6.6 HD 2762 6.9 HD 2766 6.7 HD 383 2.0 3.3 7.3 HD 457 HD 277 6.9 7.2 HD 434 6.6 HD 429 5.5 HD 319 6.3 HD 208 7.0 HD 2829 HD 162 4.3 HD 2804 5.5 5.5 6.9 4.8 5.5 HD 2815 HD 236 HD 458 5.6 5.8 HD 216 HDHD 2711 290 2.6 3.2 4.0 HD 279 7.5 6.8 HYG 587 14Lam CasHD 2882 5.7 HD 441 7.1 1.5 3.6 4.6 7.1 7.0 6.7 HYG 2433 HD 233 4.8 3.3 5.7 5.1 7.3 7.4 HD 425 6.4 7.2 HD 406 7.6 HYG 2495 7.0 7.4 HDHD 2663 299 7.1 6.6 HD 483 HD 334 6.9 2.2 HD 2893 6.7 7.3 7.6 HD 449 HD 512 3.1 4.2 HD 2839 HD 464 11.3 5.4 HD 313 6.5 HYG 762 5.8 6.3 Gl 6 9.1 0.5 HD 28367.5 9.1 HD 2871 10.4 5.8 7.5 6.6 5.1 3.4 6.7 7.7 7.7 5.1 HYGHD 5212538 HD 422 HD 2775 6.8 4.4 7.6 6.8 10.1 8.7 5.8 HYG 739 6.4 6.2 3.4 9.3 6.6 7.6 HD 2837 HYGHD 4522493 6.4 HD 403 6.1 6.8 9.1 9.5 HD 2833 HYG 751 6.7 4.2 3.1 3.9 6.6 HD 505 5.8 6.6 HD 225 10.2 3.8 8.0 0.5 11.5 HD 2873 HD 2826 HD 28232798 4.9 HD 2806 HD 2702 6.1 HD 404 HD 538 7.6 4.5 HD 2824 61 Virginis cluster HYG 778 3.7 4.6 2.5 HD 2773 -

Binocular Challenges
This page intentionally left blank Cosmic Challenge Listing more than 500 sky targets, both near and far, in 187 challenges, this observing guide will test novice astronomers and advanced veterans alike. Its unique mix of Solar System and deep-sky targets will have observers hunting for the Apollo lunar landing sites, searching for satellites orbiting the outermost planets, and exploring hundreds of star clusters, nebulae, distant galaxies, and quasars. Each target object is accompanied by a rating indicating how difficult the object is to find, an in-depth visual description, an illustration showing how the object realistically looks, and a detailed finder chart to help you find each challenge quickly and effectively. The guide introduces objects often overlooked in other observing guides and features targets visible in a variety of conditions, from the inner city to the dark countryside. Challenges are provided for viewing by the naked eye, through binoculars, to the largest backyard telescopes. Philip S. Harrington is the author of eight previous books for the amateur astronomer, including Touring the Universe through Binoculars, Star Ware, and Star Watch. He is also a contributing editor for Astronomy magazine, where he has authored the magazine’s monthly “Binocular Universe” column and “Phil Harrington’s Challenge Objects,” a quarterly online column on Astronomy.com. He is an Adjunct Professor at Dowling College and Suffolk County Community College, New York, where he teaches courses in stellar and planetary astronomy. Cosmic Challenge The Ultimate Observing List for Amateurs PHILIP S. HARRINGTON CAMBRIDGE UNIVERSITY PRESS Cambridge, New York, Melbourne, Madrid, Cape Town, Singapore, Sao˜ Paulo, Delhi, Dubai, Tokyo, Mexico City Cambridge University Press The Edinburgh Building, Cambridge CB2 8RU, UK Published in the United States of America by Cambridge University Press, New York www.cambridge.org Information on this title: www.cambridge.org/9780521899369 C P. -

Project Icarus: Astronomical Considerations Relating to the Choice of Target Star
Project Icarus: Astronomical Considerations Relating to the Choice of Target Star I. A. Crawford Department of Earth and Planetary Sciences, Birkbeck College London, Malet Street, London, WC1E 7HX Abstract In this paper we outline the considerations required in order to select a target star system for the Icarus interstellar mission. It is considered that the maximum likely range for the Icarus vehicle will be 15 light‐years, and a list is provided of all known stars within this distance range. As the scientific objectives of Icarus are weighted towards planetary science and astrobiology, a final choice of target star(s) cannot be made until we have a clearer understanding of the prevalence of planetary systems within 15 light‐ years of the Sun, and we summarize what is currently known regarding planetary systems within this volume. We stress that by the time an interstellar mission such as Icarus is actually undertaken, astronomical observations from the solar system will have provided this information. Finally, given the high proportion of multiple star systems within 15 light‐years (including the closest of all stars to the Sun in the α Centauri system), we stress that a flexible mission architecture, able to visit stars and accompanying planets within multiple systems, is desirable. This paper is a submission of the Project Icarus Study Group. Keywords: Interstellar travel; nearby stars; extrasolar planets; astrobiology 1. Introduction The Icarus study is tasked with designing an interstellar space vehicle capable of making in situ scientific investigations of a nearby star and accompanying planetary system [1,2]. This paper outlines the considerations which will feed into the choice of the target star, the choice of which will be constrained by a number of factors. -

Double Star Measurements at the Internationale Amateur Sternwarte (IAS) in Namibia in 2009
Vol. 8 No. 1 January 1, 2012 Journal of Double Star Observations Page 15 Double Star Measurements at the Internationale Amateur Sternwarte (IAS) in Namibia in 2009 Rainer Anton Altenholz/Kiel, Germany e-mail: rainer.anton"at"ki.comcity.de Abstract: This paper is a continuation of earlier work published in JDSO in 2010. Using a 40-cm-Cassegrain telescope in Namibia and a fast CCD camera, 87 double and multiple sys- tems were recorded and analyzed with the technique of “lucky imaging”. Measurements are compared with literature data. Some noteworthy systems are discussed in more detail. Introduction Instrumental The nominal focal length of the 40-cm Cas- During two weeks in September 2009, I used the segrain is 6.3 m. With my b/w-CCD camera 40-cm-Cassegrain at the Internationale Amateur (DMK21AF04, pixel size 5.6 µm square, The Imaging Sternwarte (IAS) in Namibia for observing double Source), an image scale of 0.187”/pixel was deter- stars in the southern sky [1]. Some measurements mined from measurements of reference systems, as have already been published earlier in this Journal described earlier. When using a 2x-Barlow lens, the [2]. Results for 87 more systems obtained during this scale was 0.0970“/pix. Almost always, a red filter was period are presented here. used to reduce seeing effects, as well as the chro- The technique of “lucky imaging” for recording matic aberration of the Barlow lens. Exposure times and measuring double stars is well known, and de- were from 0.5 µsec up to 0.1 sec, depending on the tails have been described in earlier papers [2,3]. -

Változócsillagok
Szatmáry Károly Változócsillagok Azokat a csillagokat hívjuk változócsillagoknak, amelyeknek valamilyen jellemzőjük, fizikai paraméterük időben változik. Általában a fényesség változásáról van szó. A megfigyelésekből a színkép és/vagy a fényesség módosulását mérhetjük meg, és ennek okát kell felderítenünk. A változócsillagok vizsgálata azért fontos, azért nagy az asztrofizikai jelentőségük, mert esetükben nagyobb lehetőség nyílik adataik, tulajdonságaik meghatározására. A változásnak ugyanis oka van, ha ezt sikerül felderíteni, akkor ez több információt szolgáltat. Magyarországon a legsikeresebb, nagy hagyományokat felmutató, és nemzetközileg elismert csillagászati kutatási téma a változócsillagok tanulmányozása. Gyakorlatilag minden csillag ide sorolható, hiszen fejlődésük során folyamatosan változik minden jellemzőjük. Szigorúbb értelemben a legfeljebb napok, évek alatti változásokat mutató objektumokról van szó. A fényesség ingadozása a 0,0001 magnitúdós, még éppen detektálható értéktől a szupernóvák 20 magnitúdós felfényesedéséig terjed. A fényességmérés pontossága a Kepler űrtávcsővel már eléri a néhány százezred magnitúdót. Gyakorlatilag ezen a szinten minden csillag változónak bizonyul. Az 1985-ös Változócsillagok Általános Katalógusa (GCVS) a kiegészítésekkel mintegy 38000 csillagot tüntetett fel. Azóta több százezerrel nőtt az ismert változók száma, főleg a nagy földi megfigyelő programok beindulása, a számos űrtávcső mérései és a mérőberendezések (pl. CCD) érzékenységének növekedése miatt. Változócsillagok elnevezése, jelölése 3.1. táblázat: A 88 csillagkép. 3.2.táblázat: Változócsillagok jelölése. A Hattyú csillagképben felfedezett első változó neve: R Cygni (a csillagkép neve ilyenkor birtokos esetben szerepel, a Cygnus-ból így lesz Cygni). J-vel kezdődő jelölés nincs, nehogy az I-vel összekeverjék. A kétbetűs jeleknél a második nem előzheti meg az elsőt ABC szerint (3.2. táblázat). A QZ utáni változó jele V335. Több csillagképben sok ezer változócsillag van. Néhány fényes csillag esetében az eredeti, görög betűs jelét használjuk, pl. -

Commodore Yelen Hererra Scowled at the Viewscreen, the Bitter Taste from Her Half-Smoked Cigar Still in Her Mouth Even Though She Had Thrown It Away Hours Ago
SKYMARSHAL 10 The Armageddon War Chapter 1 "Only the dead have seen an end to War". Plato It was only 0630 in the morning and I was already ticked off. I hadn't even finished my first cup of coffee and things were going to hell in a hand basket (if you cannot tell, I am not a morning person). I took a sip from a personalized mug that said, "Piss me off, pay the consequences.” I looked up from my half-finished cup and glared at my flag lieutenant in irritation. Lieutenant Lefler was a typical Corporate Worlder who had been raised to his current level of incompetence in the Pan-Sentient Union Navy like more than half of the officers in the fleet; for political reasons. He sat in front of me, tall and pencil-thin, with his hands repeatedly smoothing his collar, his tie clip, tie, and buttons, and then placing his hands in his lap.....for about three seconds. He then began his hand-dance again. I figured I could watch him just a few more times before I bit his head off. Lefler's hands were making their dance for the fourth time. Four was my limit. I wanted to go over there and grab his hands and say, "Stop that!" but I guess that would be sorta rude, so I just said: "Lieutenant, why are you so twitchy this morning?" He looked at me, startled. "Excuse me, sir?" I motioned to his hands making their endless circuit. He blushed and promptly laid them in his lap; self-control at its best. -

Starry Nights Typeset
Index Antares 104,106-107 Anubis 28 Apollo 53,119,130,136 21-centimeter radiation 206 apparent magnitude 7,156-157,177,223 57 Cygni 140 Aquarius 146,160-161,164 61 Cygni 139,142 Aquila 128,131,146-149 3C 9 (quasar) 180 Arcas 78 3C 48 (quasar) 90 Archer 119 3C 273 (quasar) 89-90 arctic circle 103,175,212 absorption spectrum 25 Arcturus 17,79,93-96,98-100 Acadia 78 Ariadne 101 Achernar 67-68,162,217 Aries 167,183,196,217 Acubens (star in Cancer) 39 Arrow 149 Adhara (star in Canis Major) 22,67 Ascella (star in Sagittarius) 120 Aesculapius 115 asterisms 130 Age of Aquarius 161 astrology 161,196 age of clusters 186 Atlantis 140 age of stars 114 Atlas 14 Age of the Fish 196 Auriga 17 Al Rischa (star in Pisces) 196 autumnal equinox 174,223 Al Tarf (star in Cancer) 39 azimuth 171,223 Al- (prefix in star names) 4 Bacchus 101 Albireo (star in Cygnus) 144 Barnard’s Star 64-65,116 Alcmene 52,112 Barnard, E. 116 Alcor (star in Big Dipper) 14,78,82 barred spiral galaxies 179 Alcyone (star in Pleiades) 14 Bayer, Johan 125 Aldebaran 11,15,22,24 Becvar, A. 221 Alderamin (star in Cepheus) 154 Beehive (M 44) 42-43,45,50 Alexandria 7 Bellatrix (star in Orion) 9,107 Alfirk (star in Cepheus) 154 Algedi (star in Capricornus) 159 Berenice 70 Algeiba (star in Leo) 59,61 Bessel, Friedrich W. 27,142 Algenib (star in Pegasus) 167 Beta Cassiopeia 169 Algol (star in Perseus) 204-205,210 Beta Centauri 162,176 Alhena (star in Gemini) 32 Beta Crucis 162 Alioth (star in Big Dipper) 78 Beta Lyrae 132-133 Alkaid (star in Big Dipper) 78,80 Betelgeuse 10,22,24 Almagest 39 big -

Survival of Exomoons Around Exoplanets 2
Survival of exomoons around exoplanets V. Dobos1,2,3, S. Charnoz4,A.Pal´ 2, A. Roque-Bernard4 and Gy. M. Szabo´ 3,5 1 Kapteyn Astronomical Institute, University of Groningen, 9747 AD, Landleven 12, Groningen, The Netherlands 2 Konkoly Thege Mikl´os Astronomical Institute, Research Centre for Astronomy and Earth Sciences, E¨otv¨os Lor´and Research Network (ELKH), 1121, Konkoly Thege Mikl´os ´ut 15-17, Budapest, Hungary 3 MTA-ELTE Exoplanet Research Group, 9700, Szent Imre h. u. 112, Szombathely, Hungary 4 Universit´ede Paris, Institut de Physique du Globe de Paris, CNRS, F-75005 Paris, France 5 ELTE E¨otv¨os Lor´and University, Gothard Astrophysical Observatory, Szombathely, Szent Imre h. u. 112, Hungary E-mail: [email protected] January 2020 Abstract. Despite numerous attempts, no exomoon has firmly been confirmed to date. New missions like CHEOPS aim to characterize previously detected exoplanets, and potentially to discover exomoons. In order to optimize search strategies, we need to determine those planets which are the most likely to host moons. We investigate the tidal evolution of hypothetical moon orbits in systems consisting of a star, one planet and one test moon. We study a few specific cases with ten billion years integration time where the evolution of moon orbits follows one of these three scenarios: (1) “locking”, in which the moon has a stable orbit on a long time scale (& 109 years); (2) “escape scenario” where the moon leaves the planet’s gravitational domain; and (3) “disruption scenario”, in which the moon migrates inwards until it reaches the Roche lobe and becomes disrupted by strong tidal forces. -

Investigating Exoplanet Habitability and the Stellar Magnetism of Cool Stars Across Half the Southern Sky Via Superflares, Starspots, and Stellar Rotation
INVESTIGATING EXOPLANET HABITABILITY AND THE STELLAR MAGNETISM OF COOL STARS ACROSS HALF THE SOUTHERN SKY VIA SUPERFLARES, STARSPOTS, AND STELLAR ROTATION Ward S. Howard A dissertation submitted to the faculty at the University of North Carolina at Chapel Hill in partial fulfillment of the requirements for the degree of Doctor of Philosophy in the Department of Physics and Astronomy. Chapel Hill 2021 Approved by: Nicholas M. Law Andrew W. Mann Fabian Heitsch Reyco Henning Daniel M. Scolnic ©2021 Ward S. Howard ALL RIGHTS RESERVED ii ABSTRACT Ward S. Howard: Investigating exoplanet habitability and the stellar magnetism of cool stars across half the Southern sky via superflares, starspots, and stellar rotation (Under the direction of Nicholas M. Law) Stellar flares are stochastic events that occur when a star's magnetic field re-connects, releasing intense radiation across the electromagnetic spectrum. Rocky planets in the habitable zones of M-dwarfs are often subjected to superflares, events of at least 1033 erg and 10-1000× the energy of the largest solar flares. Frequent superflares can erode the ozone layer of an Earth-like atmosphere and allow lethal amounts of UV flux to reach the surface. Conversely, too few flares may result in insufficient UV radiation to power pre-biotic chemistry due to the inherent faintness of M-dwarfs in the UV. Cool stars are often found to exhibit superflares. Cool stars are the most common type of star, and are known to frequently host rocky planets. As a result, they may host most of the universe's Earth-size planets orbiting in the habitable zones of main sequence stars.