Geometry Handbook Table of Contents
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Polygon Review and Puzzlers in the Above, Those Are Names to the Polygons: Fill in the Blank Parts. Names: Number of Sides
Polygon review and puzzlers ÆReview to the classification of polygons: Is it a Polygon? Polygons are 2-dimensional shapes. They are made of straight lines, and the shape is "closed" (all the lines connect up). Polygon Not a Polygon Not a Polygon (straight sides) (has a curve) (open, not closed) Regular polygons have equal length sides and equal interior angles. Polygons are named according to their number of sides. Name of Degree of Degree of triangle total angles regular angles Triangle 180 60 In the above, those are names to the polygons: Quadrilateral 360 90 fill in the blank parts. Pentagon Hexagon Heptagon 900 129 Names: number of sides: Octagon Nonagon hendecagon, 11 dodecagon, _____________ Decagon 1440 144 tetradecagon, 13 hexadecagon, 15 Do you see a pattern in the calculation of the heptadecagon, _____________ total degree of angles of the polygon? octadecagon, _____________ --- (n -2) x 180° enneadecagon, _____________ icosagon 20 pentadecagon, _____________ These summation of angles rules, also apply to the irregular polygons, try it out yourself !!! A point where two or more straight lines meet. Corner. Example: a corner of a polygon (2D) or of a polyhedron (3D) as shown. The plural of vertex is "vertices” Test them out yourself, by drawing diagonals on the polygons. Here are some fun polygon riddles; could you come up with the answer? Geometry polygon riddles I: My first is in shape and also in space; My second is in line and also in place; My third is in point and also in line; My fourth in operation but not in sign; My fifth is in angle but not in degree; My sixth is in glide but not symmetry; Geometry polygon riddles II: I am a polygon all my angles have the same measure all my five sides have the same measure, what general shape am I? Geometry polygon riddles III: I am a polygon. -

Properties of N-Sided Regular Polygons
PROPERTIES OF N-SIDED REGULAR POLYGONS When students are first exposed to regular polygons in middle school, they learn their properties by looking at individual examples such as the equilateral triangles(n=3), squares(n=4), and hexagons(n=6). A generalization is usually not given, although it would be straight forward to do so with just a min imum of trigonometry and algebra. It also would help students by showing how one obtains generalization in mathematics. We show here how to carry out such a generalization for regular polynomials of side length s. Our starting point is the following schematic of an n sided polygon- We see from the figure that any regular n sided polygon can be constructed by looking at n isosceles triangles whose base angles are θ=(1-2/n)(π/2) since the vertex angle of the triangle is just ψ=2π/n, when expressed in radians. The area of the grey triangle in the above figure is- 2 2 ATr=sh/2=(s/2) tan(θ)=(s/2) tan[(1-2/n)(π/2)] so that the total area of any n sided regular convex polygon will be nATr, , with s again being the side-length. With this generalized form we can construct the following table for some of the better known regular polygons- Name Number of Base Angle, Non-Dimensional 2 sides, n θ=(π/2)(1-2/n) Area, 4nATr/s =tan(θ) Triangle 3 π/6=30º 1/sqrt(3) Square 4 π/4=45º 1 Pentagon 5 3π/10=54º sqrt(15+20φ) Hexagon 6 π/3=60º sqrt(3) Octagon 8 3π/8=67.5º 1+sqrt(2) Decagon 10 2π/5=72º 10sqrt(3+4φ) Dodecagon 12 5π/12=75º 144[2+sqrt(3)] Icosagon 20 9π/20=81º 20[2φ+sqrt(3+4φ)] Here φ=[1+sqrt(5)]/2=1.618033989… is the well known Golden Ratio. -
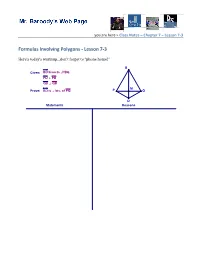
Formulas Involving Polygons - Lesson 7-3
you are here > Class Notes – Chapter 7 – Lesson 7-3 Formulas Involving Polygons - Lesson 7-3 Here’s today’s warmup…don’t forget to “phone home!” B Given: BD bisects ∠PBQ PD ⊥ PB QD ⊥ QB M Prove: BD is ⊥ bis. of PQ P Q D Statements Reasons Honors Geometry Notes Today, we started by learning how polygons are classified by their number of sides...you should already know a lot of these - just make sure to memorize the ones you don't know!! Sides Name 3 Triangle 4 Quadrilateral 5 Pentagon 6 Hexagon 7 Heptagon 8 Octagon 9 Nonagon 10 Decagon 11 Undecagon 12 Dodecagon 13 Tridecagon 14 Tetradecagon 15 Pentadecagon 16 Hexadecagon 17 Heptadecagon 18 Octadecagon 19 Enneadecagon 20 Icosagon n n-gon Baroody Page 2 of 6 Honors Geometry Notes Next, let’s look at the diagonals of polygons with different numbers of sides. By drawing as many diagonals as we could from one diagonal, you should be able to see a pattern...we can make n-2 triangles in a n-sided polygon. Given this information and the fact that the sum of the interior angles of a polygon is 180°, we can come up with a theorem that helps us to figure out the sum of the measures of the interior angles of any n-sided polygon! Baroody Page 3 of 6 Honors Geometry Notes Next, let’s look at exterior angles in a polygon. First, consider the exterior angles of a pentagon as shown below: Note that the sum of the exterior angles is 360°. -

Geometric Constructions of Regular Polygons and Applications to Trigonometry Introduction
Geometric Constructions of Regular Polygons and Applications to Trigonometry José Gilvan de Oliveira, Moacir Rosado Filho, Domingos Sávio Valério Silva Abstract: In this paper, constructions of regular pentagon and decagon, and the calculation of the main trigonometric ratios of the corresponding central angles are approached. In this way, for didactic purposes, it is intended to show the reader that it is possible to broaden the study of Trigonometry by addressing new applications and exercises, for example, with angles 18°, 36° and 72°. It is also considered constructions of other regular polygons and a relation to a construction of the regular icosahedron. Introduction The main objective of this paper is to approach regular pentagon and decagon constructions, together with the calculation of the main trigonometric ratios of the corresponding central angles. In textbooks, examples and exercises involving trigonometric ratios are usually restricted to so-called notable arcs of angles 30°, 45° and 60°. Although these angles are not the main purpose of this article, they will be addressed because the ingredients used in these cases are exactly the same as those we will use to build the regular pentagon and decagon. The difference to the construction of these last two is restricted only to the number of steps required throughout the construction process. By doing so, we intend to show the reader that it is possible to broaden the study of Trigonometry by addressing new applications and exercises, for example, with angles 18°, 36° and 72°. The ingredients used in the text are those found in Plane Geometry and are very few, restricted to intersections of lines and circumferences, properties of triangles, and Pythagorean Theorem. -

Convex Polytopes and Tilings with Few Flag Orbits
Convex Polytopes and Tilings with Few Flag Orbits by Nicholas Matteo B.A. in Mathematics, Miami University M.A. in Mathematics, Miami University A dissertation submitted to The Faculty of the College of Science of Northeastern University in partial fulfillment of the requirements for the degree of Doctor of Philosophy April 14, 2015 Dissertation directed by Egon Schulte Professor of Mathematics Abstract of Dissertation The amount of symmetry possessed by a convex polytope, or a tiling by convex polytopes, is reflected by the number of orbits of its flags under the action of the Euclidean isometries preserving the polytope. The convex polytopes with only one flag orbit have been classified since the work of Schläfli in the 19th century. In this dissertation, convex polytopes with up to three flag orbits are classified. Two-orbit convex polytopes exist only in two or three dimensions, and the only ones whose combinatorial automorphism group is also two-orbit are the cuboctahedron, the icosidodecahedron, the rhombic dodecahedron, and the rhombic triacontahedron. Two-orbit face-to-face tilings by convex polytopes exist on E1, E2, and E3; the only ones which are also combinatorially two-orbit are the trihexagonal plane tiling, the rhombille plane tiling, the tetrahedral-octahedral honeycomb, and the rhombic dodecahedral honeycomb. Moreover, any combinatorially two-orbit convex polytope or tiling is isomorphic to one on the above list. Three-orbit convex polytopes exist in two through eight dimensions. There are infinitely many in three dimensions, including prisms over regular polygons, truncated Platonic solids, and their dual bipyramids and Kleetopes. There are infinitely many in four dimensions, comprising the rectified regular 4-polytopes, the p; p-duoprisms, the bitruncated 4-simplex, the bitruncated 24-cell, and their duals. -
Parallelogram Rhombus Nonagon Hexagon Icosagon Tetrakaidecagon Hexakaidecagon Quadrilateral Ellipse Scalene T
Call List parallelogram rhombus nonagon hexagon icosagon tetrakaidecagon hexakaidecagon quadrilateral ellipse scalene triangle square rectangle hendecagon pentagon dodecagon decagon trapezium / trapezoid right triangle equilateral triangle circle octagon heptagon isosceles triangle pentadecagon triskaidecagon Created using www.BingoCardPrinter.com B I N G O parallelogram tetrakaidecagon square dodecagon circle rhombus hexakaidecagon rectangle decagon octagon Free trapezium / nonagon quadrilateral heptagon Space trapezoid right isosceles hexagon hendecagon ellipse triangle triangle scalene equilateral icosagon pentagon pentadecagon triangle triangle Created using www.BingoCardPrinter.com B I N G O pentagon rectangle pentadecagon triskaidecagon hexakaidecagon equilateral scalene nonagon parallelogram circle triangle triangle isosceles Free trapezium / octagon triangle Space square trapezoid ellipse heptagon rhombus tetrakaidecagon icosagon right decagon hendecagon dodecagon hexagon triangle Created using www.BingoCardPrinter.com B I N G O right decagon triskaidecagon hendecagon dodecagon triangle trapezium / scalene pentagon square trapezoid triangle circle Free tetrakaidecagon octagon quadrilateral ellipse Space isosceles parallelogram hexagon hexakaidecagon nonagon triangle equilateral pentadecagon rectangle icosagon heptagon triangle Created using www.BingoCardPrinter.com B I N G O equilateral trapezium / pentagon pentadecagon dodecagon triangle trapezoid rectangle rhombus quadrilateral nonagon octagon isosceles Free scalene hendecagon -

From One Polygon to Another: a Distinctive Feature of Some Ottoman Minarets
Bernard Parzysz Research Université d’Orléans (France) From One Polygon to Another: Laboratoire André-Revuz Université Paris-Diderot A Distinctive Feature of Some 22 avenue du Général Leclerc Ottoman Minarets 92260 Fontenay-aux-Roses FRANCE Abstract. This article is a geometer’s reflection on a specificity [email protected] presented by some Turkish minarets erected during the Ottoman period which gives them a recognisable appearance. Keywords: Ottoman The intermediate zone (pabuç) between the shaft and the architecture, minarets, base of these minarets, which has both a functional and an polyhedra, Turkish triangles aesthetic function, is also an answer to the problem of connecting two prismatic solids having an unequal number of lateral sides (namely, two different multiples of 4). In the present case this connection was achieved by creating a polyhedron, the lateral sides of which are triangles placed head to tail. The multiple variables of the problem allowed the Ottoman architects to produce various solutions. 1 Introduction Each religion developed specific places for worship: synagogues, temples, churches, mosques, and so forth, and the rites and ceremonies for which they were designed conditioned their architecture. Mosques are associated with Islam, and are most certainly perceived throughout the world as its most typical monuments. They accompanied very early the history of this religion, but one of their most emblematic features, the minaret, did not appear immediately and when they did, specificities occurred depending on the period and geographic and cultural area they were built in. As Auguste Choisy writes in his Histoire de l’architecture: “Minarets have their own geography, just as steeples have theirs”. -

Wythoffian Skeletal Polyhedra
Wythoffian Skeletal Polyhedra by Abigail Williams B.S. in Mathematics, Bates College M.S. in Mathematics, Northeastern University A dissertation submitted to The Faculty of the College of Science of Northeastern University in partial fulfillment of the requirements for the degree of Doctor of Philosophy April 14, 2015 Dissertation directed by Egon Schulte Professor of Mathematics Dedication I would like to dedicate this dissertation to my Meme. She has always been my loudest cheerleader and has supported me in all that I have done. Thank you, Meme. ii Abstract of Dissertation Wythoff's construction can be used to generate new polyhedra from the symmetry groups of the regular polyhedra. In this dissertation we examine all polyhedra that can be generated through this construction from the 48 regular polyhedra. We also examine when the construction produces uniform polyhedra and then discuss other methods for finding uniform polyhedra. iii Acknowledgements I would like to start by thanking Professor Schulte for all of the guidance he has provided me over the last few years. He has given me interesting articles to read, provided invaluable commentary on this thesis, had many helpful and insightful discussions with me about my work, and invited me to wonderful conferences. I truly cannot thank him enough for all of his help. I am also very thankful to my committee members for their time and attention. Additionally, I want to thank my family and friends who, for years, have supported me and pretended to care everytime I start talking about math. Finally, I want to thank my husband, Keith. -

Math Handbook of Formulas, Processes and Tricks Pre‐Algebra
Math Handbook of Formulas, Processes and Tricks (www.mathguy.us) Pre‐Algebra Prepared by: Earl L. Whitney, FSA, MAAA Version 2.4 April 2, 2017 Copyright 2010‐2017, Earl Whitney, Reno NV. All Rights Reserved Pre‐Algebra Handbook Table of Contents Blue = Developed specifically for Pre‐Algebra Handbook Green = Also included in Algebra Handbook Purple = Also Included in Geometry Handbook Page Description Chapter 1: Numbers 8 Divisibility Rules (2 to 12) 9 Prime Numbers 10 Prime Factor Trees 11 More about Prime Numbers 12 GCD and LCM (Greatest Common Divisor) 13 GCD and LCM (Least Common Multiple, Lowest Common Denominator) 14 Finding All Factors (Divisors) 15 Finding All Factors, a Second Approach 16 Roman Numerals Chapter 2: Measures and Weights 17 Metric Measures and Weights 18 Measures and Weights – U.S. Conversions 19 Measures and Weights – U.S./Metric Conversions Chapter 3: Operations 20 Order of Operations 21 Basic Properties of Algebra (e.g., Distributive) 22 Linear Patterns (Recognition, Converting to an Equation) 23 Operating with Real Numbers (Absolute Value, +, ‐, x, ÷) Chapter 4: Fractions and Decimals 24 Adding and Subtracting Fractions 25 Multiplying and Dividing Fractions 26 Mixed Numbers and Improper Fractions 27 Adding and Subtracting Mixed Numbers 28 Multiplying Mixed Numbers 29 Dividing Mixed Numbers 30 Decimal Calculations 31 Comparing Numbers Cover art by Rebecca Williams, 32 Rounding Numbers Twitter handle: @jolteonkitty Version 2.4 Page 2 of 107 April 2, 2017 Pre‐Algebra Handbook Table of Contents Page Description Chapter -

Constructions for Large Spatial Point-Line (Nk) Configurations
Also available at http://amc-journal.eu ISSN 1855-3966 (printed edn.), ISSN 1855-3974 (electronic edn.) ARS MATHEMATICA CONTEMPORANEA 7 (2014) 175–199 Constructions for large spatial point-line (nk) configurations Gabor´ Gevay´ ∗ Bolyai Institute, University of Szeged, Aradi vertan´ uk´ tere 1, H-6720 Szeged, Hungary Received 31 October 2011, accepted 12 April 2012, published online 19 April 2013 Abstract Highly symmetric figures, such as regular polytopes, can serve as a scaffolding on which spatial (nk) point-line configurations can be built. We give several constructions using this method in dimension 3 and 4. We also explore possible constructions of point- line configurations obtained as Cartesian products of smaller ones. Using suitable powers of well-chosen configurations, we obtain infinite series of (nk) configurations for which both n and k are arbitrarily large. We also combine the method of polytopal scaffolding and the method of powers to construct further examples. Finally, we formulate an incidence statement concerning a (1004) configuration in 3-space derived from the product of two complete pentalaterals; it is posed as a conjecture. Keywords: Spatial configuration, Platonic solid, regular 4-polytope, product of configurations, inci- dence statement. Math. Subj. Class.: 51A20, 51A45, 51E30, 52B15 1 Introduction By a (pq; nk) configuration we mean a set consisting of p points and n lines such that k of the points lie on each line and q of the lines pass through each point [7, 16, 19, 21]. If, in particular, p = n, then q = k; in this case the notation (nk) is used, and we speak of a balanced configuration [16]. -

Handling Handles. Part II. Stratification and Data Analysis
Handling Handles. Part II. Stratification and Data Analysis T. Bargheera,b,c, J. Caetanod, T. Fleuryd,e, S. Komatsuf , P. Vieirag,h aInstitut für Theoretische Physik, Leibniz Universität Hannover, Appelstraße 2, 30167 Hannover, Germany bDESY Theory Group, DESY Hamburg, Notkestraße 85, D-22603 Hamburg, Germany cKavli Institute for Theoretical Physics, University of California Santa Barbara, CA 93106, USA dLaboratoire de Physique Théorique de l’École Normale Supérieure de Paris, CNRS, ENS & PSL Research University, UPMC & Sorbonne Universités, 75005 Paris, France. eInternational Institute of Physics, Universidade Federal do Rio Grande do Norte, Campus Universitario, Lagoa Nova, Natal-RN 59078-970, Brazil f School of Natural Sciences, Institute for Advanced Study, Einstein Drive, Princeton, NJ 08540, USA gPerimeter Institute for Theoretical Physics, 31 Caroline St N Waterloo, Ontario N2L 2Y5, Canada hInstituto de Física Teórica, UNESP - Univ. Estadual Paulista, ICTP South American Institute for Fundamental Research, Rua Dr. Bento Teobaldo Ferraz 271, 01140-070, São Paulo, SP, Brasil [email protected], [email protected], [email protected], [email protected], [email protected] Abstract In a previous work [1], we proposed an integrability setup for computing non-planar corrections to correlation functions in N = 4 super Yang– Mills theory at any value of the coupling constant. The procedure consists of drawing all possible tree-level graphs on a Riemann surface of given genus, completing each graph to a triangulation, inserting a hexagon form factor into each face, and summing over a complete set of states on each edge of the triangulation. The summation over arXiv:1809.09145v2 [hep-th] 4 Jun 2019 graphs can be interpreted as a quantization of the string moduli space integration. -

Hexagon - Wikipedia
12/2/2018 Hexagon - Wikipedia Hexagon In geometry, a hexagon (from Greek ἕξ hex, "six" and γωνία, gonía, "corner, angle") is a six sided polygon or 6-gon. The total Regular hexagon of the internal angles of any hexagon is 7 20°. Contents Regular hexagon Parameters Symmetry A2 and G2 groups Related polygons and tilings Hexagonal structures A regular hexagon Tesselations by hexagons Type Regular polygon Hexagon inscribed in a conic section Cyclic hexagon Edges and 6 vertices Hexagon tangential to a conic section Schläfli {6}, t{3} Equilateral triangles on the sides of an arbitrary hexagon symbol Skew hexagon Petrie polygons Coxeter diagram Convex equilateral hexagon Polyhedra with hexagons Symmetry Dihedral (D6), order Hexagons: natural and human-made group 2×6 See also Internal 120° References angle External links (degrees) Dual Self polygon https://en.wikipedia.org/wiki/Hexagon 1/18 12/2/2018 Hexagon - Wikipedia Regular hexagon Properties Convex, cyclic, equilateral, isogonal, A regular hexagon has Schläfli symbol {6}[1] and can also be constructed as a truncated equilateral triangle, t{3}, which isotoxal alternates two types of edges. A regular hexagon is defined as a hexagon that is both equilateral and equiangular. It is bicentric, meaning that it is both cyclic (has a circumscribed circle) and tangential (has an inscribed circle). The common length of the sides equals the radius of the circumscribed circle, which equals times the apothem (radius of the inscribed circle). All internal angles are 120 degrees. A regular hexagon has 6 rotational symmetries (rotational symmetry of order six) and 6 reflection symmetries (six lines of symmetry), making up the dihedral group D6 .