International Graduate School on Control
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Operated by Bpifrance
PRESS RELEASE FEBRUARY 7, 2017 Oncodesign’s OncoSNIPE® collaborative programme receives €7.7 million in support from the “Investments for the Future Programme” operated by Bpifrance Creation of a consortium of hospitals, universities and corporates to develop diagnostic tools and research new therapeutic targets The programme has a total budget of €12 million, with €7.7 million coming from French government funds as part of call for structural competitiveness projects (PSPC), under the “Investment for the Future Programme”, managed by the Commissariat Général à l'Investissement (CGI) and operated by Bpifrance Dijon, France, February 7, 2017 - Oncodesign (FR0011766229 - ALONC), a biotechnology company serving the pharmaceutical industry in the discovery of new therapeutic molecules to fight cancer and other serious illnesses with no known effective treatment, today announced Prime Minister’s agreement to provide financial support for its strategic OncoSNIPE® programme. OncoSNIPE® is a programme designed to develop and implement “bio-IT” approaches, drawing on methodologies including artificial intelligence, statistical learning and semantic enrichment to help identify and characterise patients who are resistant to anti-cancer treatments and thus target research and development on specific therapies through the identification of new targets. OncoSNIPE® will enable Oncodesign to generate new research pathways for its Experimentation and Discovery activities. The programme, which will last four years, is managed and coordinated by Oncodesign and will bring together four industrial partners with complementary expertise and core businesses – Expert System (Modena, Italy), Sword (Lyon, France), Acobiom (Montpellier, France) and Oncodesign (Dijon, France) – and three French academic institutions – Hôpitaux Universitaires de Strasbourg, Centre George François Leclerc in Dijon and Institut Paoli Calmettes in Marseille, these last two being anti-cancer centres. -

An Active Network of Twin Towns
Dijon, a Regional Capital with AN ACTIVE NETWORK an International Standing OF TWIN TOWNS François Rebsamen Mayor of Dijon and President of Greater Dijon Unesco's dual recognition of Dijon, with the Gastronomic meal of the French and the Climates of Burgundy's Vineyards, confirms our city's worldwide prestige and international appeal. Our region is fortunate to be identified as a key place of gastronomy, wine and historical heritage. The hundreds of thousands of tourists who come to Dijon each year attest to just how vibrant our city is. And their numbers are on the rise. Over the past 15 years, we have implemented an ambitious strategy which is commensurate with our means and size: we have invested more than one billion euros in major infrastructures, making Dijon a true metropolitan regional city. In addition, Greater Dijon is one of the few urban areas in Greater Eastern France, with a continually increasing population and since 1st January 2016, it is ranked among France's top regional capitals. Dijon is a cosmopolitan city with some 126 different nationalities and several consulates and foreign cultural centres. It is therefore not surprising that it is setting its sight at the international level. With more than 3,000 foreign students each year, through its participation in important trade and tourism fairs, with its European cultural and sporting events, in addition to the well-known international firms set up in the city, there is no doubt that Dijon is globally minded. And these impressive facts are the modern day version of Dijon's impressive history with the Dukes of Burgundy who used to be at the head of the biggest political and artistic power of their time. -

Jean-Sauveur Ay
February 21, 2015 Curriculum Vitae | Jean-Sauveur Ay Position Researcher in Economics (Chargé de Recherche) French National Institute for Agricultural Research Address INRA – AgroSup UMR 1041 CESAER 26 blvd Docteur Petitjean 21000 Dijon (France) Website www.dijon.inra.fr/cesaer/membres/jean-sauveur-ay/ Experience From 2013 to 2014 Research Fellow, INRA and AgroParisTech UMR 210 Économie Publique, 75005 Paris (France) From 2011 to 2013 Postdoctoral Fellow, CNRS and MNHN UMR 7204 CESCO, 75005 Paris (France) From 2008 to 2011 PhD Student, INRA and AgroSup UMR 1041 CESAER, 21000 Dijon (France) Education 2011 PhD in Economics, INRA and University of Burgundy Title: “Land Heterogeneity and Economic Scarcity” With highest honors, Supervisor: Jean Cavailhès 2007 MA in Economics, Paris School of Economics (EHESS) Major: Public Economics, Minor: Econometrics 2007 MA in Economic Engineering, University of Aix-Marseille II Publications Peer-reviewed Jean-Sauveur Ay. Information sur l’hétérogénéité de la terre et délégation de la régulation foncière. Revue d’Économie Politique, 125(3):in press, 2015. Jean-Sauveur Ay, Raja Chakir, Luc Doyen, Frédéric Jiguet, and Paul Leadley. Inte- grated models, scenarios and dynamics of climate, land use and common birds. 1 Climatic Change, 126(1-2):13–30, 2014. Jean-Sauveur Ay and Claude Napoléone. Efficiency and equity of land conserva- tion schemes: The effect of policy scale. Journal of Environmental Management, 129:190–198, 2013. Jean-Sauveur Ay and Claude Napoléone. La gestion publique des ressources fon- cières: Entre évaluation de la rareté et choix d’usage. Revue des Régions Arides, 30(1):177–190, 2013. Ghislain Geniaux, Jean-Sauveur Ay, and Claude Napoléone. -

Learning French at Ub
University of Burgundy France Greetings from Burgundy-Franche-Comté… Burgundy, a great place to live and study • An important region in France and Europe • One of France's main wine producing areas Dijon, capital of the Dukes of Burgundy • Where history and modernity unite • UNESCO Heritage Status • International City of Gastronomy and Wine • A great place to live and study: safe, calm and green city Key figures and history of the uB • Created in 1722 • 400 degrees • Creation of the Dijon campus in 1957 • 27 research units • 30,000 students amongst whom 2,300 are international • 226 € million budget for 2017 students • 130 student associations • 1,000 PhD students amongst whom 350 are international • More than 50 free sports activities students • University’s medical centre • 6,400 employees: administrative staff, teaching staff, • Service for disabled students researchers… • Nursery • 2015: uB became part of the Community of the University Burgundy Franche-Comté with 55,000 students Dijon campus, the main and original campus • A large and green campus in the city • The best conditions to study • A great place to enjoy the student way of life Dijon Campus • Central administrative building • International house • Sport centre • Majority of faculties • Cultural centre Atheneum • Student house • Student centre • Research labs • Mansart theatre • Students’ associations • Libraries • Language centres • Accommodation, restaurants, • Radio Campus • Medical centre cafeterias The other five uB campuses • Le Creusot Campus • Nevers Campus • Auxerre -

European University Networks (EUN) – National Initiative Funded Projects, Funding Period: 01.01.2020 – 31.12.2022
European University Networks (EUN) – national initiative Funded projects, funding period: 01.01.2020 – 31.12.2022 Programme line 1 - Topping up German HEI Funded network Partner HEI* Freie Universität UNA Europa University of Bologna (IT) Berlin University of Edinburgh (UK) Jagiellonian University (PL) Catholic University of Leuven (BE) Complutense University of Madrid (ES) University of Paris 1 Panthéon-Sorbonne (FR) Hertie School CIVICA – The European Bocconi University (IT) University of Social Sciences Central European University (HU) European University Institute (IT) National University of Political Studies and Public Administration (RO) Sciences Po (FR) Stockholm School of Economics (SE) Universität Bremen YUFE – Young Universities for University of Antwerp (BE) the Future of Europe University of Cyprus (CY) University of Eastern Finland (FI) University of Essex (UK) Maastricht University (NL) University Carlos III Madrid (ES) University of Rome Tor Vergata (IT) Technische UNITE! – University Network for Aalto University (FI) Universität Innovation, Technology and Polytechnic University of Catalonia (ES) Darmstadt Engineering Grenoble Institute of Technology (FR) KTH Royal Institute of Technology (SE) University of Lisbon (PT) Polytechnic University of Turin (IT) Hochschule für EU4ART – Alliance for Hungarian University of Fine Arts (HU) Bildende Künste Common Fine Arts Curriculum Art Academy of Latvia (LV) Dresden Academy of Fine Arts of Rome (IT) Albert-Ludwigs- EPICUR – European University of Amsterdam (NL) Universität Freiburg -
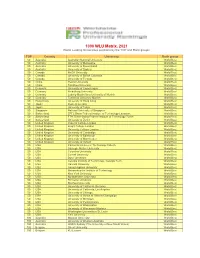
WLU Table 2021
1000 WLU Matrix. 2021 World Leading Universities positions by the TOP and Rank groups TOP Country University Rank group 50 Australia Australian National University World Best 50 Australia University of Melbourne World Best 50 Australia University of Queensland World Best 50 Australia University of Sydney World Best 50 Canada McGill University World Best 50 Canada University of British Columbia World Best 50 Canada University of Toronto World Best 50 China Peking University World Best 50 China Tsinghua University World Best 50 Denmark University of Copenhagen World Best 50 Germany Heidelberg University World Best 50 Germany Ludwig-Maximilians University of Munich World Best 50 Germany Technical University Munich World Best 50 Hong Kong University of Hong Kong World Best 50 Japan Kyoto University World Best 50 Japan University of Tokyo World Best 50 Singapore National University of Singapore World Best 50 Switzerland EPFL Swiss Federal Institute of Technology Lausanne World Best 50 Switzerland ETH Zürich-Swiss Federal Institute of Technology Zurich World Best 50 Switzerland University of Zurich World Best 50 United Kingdom Imperial College London World Best 50 United Kingdom King's College London World Best 50 United Kingdom University College London World Best 50 United Kingdom University of Cambridge World Best 50 United Kingdom University of Edinburgh World Best 50 United Kingdom University of Manchester World Best 50 United Kingdom University of Oxford World Best 50 USA California Institute of Technology Caltech World Best 50 USA Carnegie -

Solve-RD Publication Policy
Solve-RD Publication Policy Version V2.1 Date 18 December 2020 (V2.1) 18 April 2018 (V2) History of changes V2.1: Update Annex I (Solve-RD author list) Authors Holm Graessner, Tina Harmuth Approved by SC 24.4.2018 (V2) 1 Solve-RD as an author (if allowed for by journal) An affiliation list will be created and regularly updated and will contain all members of the Solve-RD consortium (see Annex I). This list will determine the Solve-RD author (‘Solve-RD consortium’). The author list will be reviewed and updated with each publication submission that makes use of the author list by the project management team (lead: Holm Graessner). The Solve-RD author shall be used for all publications if allowed for by the journal. 2 Notification and authorship policy with regard to shared data All Solve-RD publications are acknowledged to be based on the fundamental principles of open scientific collaboration, reciprocity, attribution and benefit sharing. For any publication resulting from work carried out using data shared or generated through Solve-RD (e.g. for identifying a novel gene), including where data has been accessed through the RD-Connect Genome-Phenome Analysis Platform, the authors should in all cases acknowledge and give appropriate authorship positions to all relevant parties in line with best practice for acknowledgement of scientific contribution including submission of the primary data. Examples and further principles are described below. 1. A publication arising from research in which the party leading the publication (“the PI team”) is primarily analysing their own submitted data (example: novel gene discovery by a submitter analysing their own patient cohorts in the RD-Connect GPAP): i. -

FBF 2017 Report
2017 France-Berkeley Fund ANNUAL REPORT Promoting collaborative, bi-national research and exchange FRANCE-BERKELEY FUND MINISTÈRE DE L'ÉDUCATION NATIONALE, DE L'ENSEIGNEMENT SUPÉRIEUR ET DE LA RECHERCHE 203 Moses Hall DGESIP-DGRI - MEIRIES University of California, Berkeley 1 rue Descartes Berkeley, CA 94720 75231 Paris Cedex 05 http://fbf.berkeley.edu France +1.510.643.5799 +33 (0) 1.55.55.79.88 [email protected] http://www.enseignementsup-recherche.gouv.fr/ FRANCE- BERKELEY FUND 2017 EXECUTIVE COMMITTEE EVALUATION COMMITTEE Paul Alivisatos BERKELEY Michelle C. Chang Denis Despréaux Michelle C. Chang Jeroen Dewulf Jeroen Dewulf Larry M. Hyman Larry M. Hyman Névine Kocher Madeleine McBain Emmanuel Lebrun-Damiens Krishna K. Niyogi Bénédicte de Montlaur Carlton R. Pennypacker Krishna K. Niyogi Robert Price Carlton R. Pennypacker Minh-Hà Pham FRANCE Robert Price Mission Expertise Internationale Clément Sanchez 02 Director's Foreword 03 Annual News 06 FBF Statistics 13 2017 Grantees 16 Interim Reports 32 Final Reports CONTENTS FROM THE EXECUTIVE DIRECTOR Since its inception in 1994, the France-Berkeley Fund has fostered innovative, bi-national research bringing together senior and junior researchers in a variety of ways. Over two decades later, the France-Berkeley Fund continues to thrive, having supported over 400 projects and counting. I am pleased to showcase the outstanding collaborations that we had the honor to support in 2016-2017, and to introduce the 18 new projects that we eagerly support during this award cycle. We were overjoyed to see strong interest and participation in the FBF once again this past year, receiving over 70 competitive applications from all fields of study. -

VAITKEVICIUTE Jaune –
14, rue Proudhon 21 000 Dijon France VAITKEVICIUTE H +33760752579 B [email protected] Jaune Nationality: Lithuanian (EU) Key-words: Environmental economics, Applied microeconomics, Econometrics / Spatial econometrics, Climate change, Agriculture. Research Activities Publications Vaitkeviciute J., Chakir R., Van Passel S., 2019, “Climate variable choice in Ricardian studies of European agriculture”. Forthcoming in Revue Economique. Martin E. & Vaitkeviciute J., 2016, “Mesure de l’impact du changement climatique sur l’agriculture de Côte-d’Or”, Economie Rurale, No. 355. Work Documents Vaitkeviciute J., Chakir R., Martin E., “Climate impacts on European agriculture : Structural estimation”.Work in progress. Vaitkeviciute J., “The impacts of climate change on European agriculture revenue”. Work in progress. Vaitkeviciute J., “Measuring the impacts of climate change on agriculture with econometrics : literature and methods”. Work in progress. Vaitkeviciute J. & Claude D., 2013, “Strategic privatization and rental choices under trade and local pollution”. Mimeo. Communications Vaitkeviciute J., 2019, “The impacts of climate change on European agriculture revenue”, UMR BETA seminar, January 15, Nancy, France. Vaitkeviciute J., 2018, “The impacts of climate change on European agriculture revenue : weather vs climate data”, Poster presentation, Annual Conference of Climate Economics Chair “Clmate change and economic development”, October 4th, Paris, France. Vaitkeviciute J., 2018, “The impacts of climate change on European agriculture revenue”, FAERE, August 30-31, Aix-en-Provence, France. Vaitkeviciute J., Chakir R., Van Passel S., 2018, “Climate variable choice in economic studies on European agriculture”, Spatial Econometrics Association, June 11-12, Vienna, Austria. Vaitkeviciute J., Chakir R., Van Passel S., 2018, “Climate variable choice in economic studies on European agriculture”, Spatial Econometrics Workshop, May 24-25, Dijon, France. -

Smart City and Decision-Taking 9 July 2021 Worshop Organised at Distance and On-Site
Smart city and decision-taking 9 July 2021 Worshop organised at distance and on-site Organisers Emmanuel Py, CID, University of Burgundy Maximilien Lanna, CID, Comue UBFC Contact : [email protected] Programme 9h15 Welcome coffee 9h45 Introduction to the workshop by Alexis Mages, Dean of the DSEP faculty, University of Burgundy-UBFC and Emmanuel Py, Director of the Chair Smart City and data governance, University of Burgundy-UBFC 10h-12h Round-table 1 – The foundations of decision-taking, what data for what uses ? Introductory remarks and presidence by Jean-Bernard Auby, Emeritus Professor, Sciences Po Paris « Is the protection of personal data an obstacle to decision-making?», Thibault Douville, Professor, University of Caen Normandie « Decision-making and ethics, what framework for algorithm processing ? », Maximilien Lanna, Post-doc researcher, CID, UBFC « Decision-making and Open Data, what transparency ? », speaker to be confirmed 12h-13h30 Lunch break 13h30-15h30 Round-table 2 – Tools and modes of decision-taking Introductory remarks and presidence by Christophe Nicolle, director of CIAD (Distributed Knowledge and Artificial Intelligence, UBFC) «Regulation and data sharing, challenges and perspectives», Karine Favro, Professor, University of Haute Alsace «API and data sharing, towards a decompartmentalization of public services ?», Emilie Debaets, Lecturer, University Toulouse 1 Capitole «Energy governance through data, the example of the Linky electric meter», Thoma Lamb, PhD student in Political Science, University -

Automne Asiatique 2020
AUTOMNE ASIATIQUE 2020 "Asian Autumn", the biggest virtual sessions by French universities... Live from France! Discover 19 French specialized LIVE FROM FRANCE schools in Business, hospitality, engineering, art, language and gastronomy... CONTACT CAMPUS FRANCE THAILAND 02 627 2160 | [email protected] [email protected] 19 FRENCH INSTITUTIONS Get to know about: Gastronomy / Hospitality Business and Management school Engineering School Flagrance school French Language Art school Film/photo school Design/Fashion school HOWJOIN TO TO REGISTER PLEASE, *Registration required* FILL THE SURVEY BY SCANNING THE QR CODE : Hospitality Schools Hospitality School Ferrières aspires to become the School of choice for Hospitality, Gastronomy and Luxury sector professionals. This goal, the pursuit of French Excellence, is deeply embedded in Ferrières’ DNA. Specific professional goals - Within The 1st Worldwide Business the Ferrières ecosystem operational School Group in Hospitality and units, chefs and departments Tourism Management – Vatel regularly provide students with the group opportunity to take on specific professional roles (occasional or temporary work) in hospitality and 55 campuses worldwide, located restaurant professions. These roles Scan to register & on 4 continents, 35.000 alumnis are allocated to the best students, Vatel’s group is the world’s giving them the opportunity to partly Check the schedules leading Business School Group finance their studies. in Hospitality and Tourism. More information : Ferrières school *Registration required* 670 students with 52 different nationalities. The 'Les Halle's Campus (Bachelor) and 'Chartons' Campus (MBA) have a 4* Ecolabel certified hotel and The Tables Vatel restaurant. More information : Vatel Bordeaux Business & Management Schools Business & Management Schools Located in the South of France, IAE Montpellier School of Management is part of Montpellier University and is accredited by the French Ministry of Higher Education and private multidisciplinary Research. -

Chau-Duy-Tam VO (Post-Doctoral Research Fellow)
Chau-Duy-Tam VO (Post-doctoral Research Fellow) Address : Laboratoire de Chimie des Processus Biologique Collège de France 11 place Marcelin Berthelot 75005 Paris, France Phone number: (+33) 1 44 27 10 76 Email: [email protected] RESEARCH ACTIVITIES Biochemical and structural studies of multi-protein complex involved in the ubiquinone biosynthesis under aerobic and anaerobic conditions EDUCATIONAL BACKGROUND 2019 – current : Post-doctoral Research Program Collège de France (Paris, France) 2016 – 2019 : Biochemistry PhD Program Sorbonne University and Collège de France (Paris, France) 2016: Master’s degree in Pharmaceutical Chemistry Faculty of Pharmacy – University of Paris–Sud (Paris, France) 2015: First year of Master’s degree in Molecular and Cellular Biology University Pierre and Marie Curie (Paris, France) 2013: Bachelor’s degree in Biochemistry and Molecular Biology University of Burgundy (Dijon, France) PREVIOUS RESEARCH ACTIVITIES 2016: Laboratory of pharmacognosy - Faculty of Pharmacy – University of Paris–Sud, France Isolation and characterization of natural compounds from Mentha × piperita (Lamiaceae) 2015: Cytokine Signaling Lab, Pasteur Institute, Paris, France -Study of USP18 and ISG15, negative regulators of type I Interferon JAK/STAT signaling -Functional study of TYK2 variants associated with autoimmune diseases 2014: Singapore Immunology Network, A*STAR, Singapore Characterization of bi-specific antibodies using for Interleukin-2 receptors stimulation 2014: National Museum of Natural History, Paris, France Purification from human cells of the “Bloom-Topoisomerase IIIα-RMI” dissolvasome, a complex involved in DNA replication and repair PUBLICATIONS Vo CD, Michaud J, Elsen S, et al. The O2-independent pathway of ubiquinone biosynthesis is essential for denitrification in Pseudomonas aeruginosa.