Analysis of Non-Track-Circuit Highway-Rail Grade Crossing Train Detection Technologies
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Approved Signalling Items for the ARTC Network ESA-00-01
Division / Business Unit: Corporate Services & Safety Function: Signalling Document Type: Catalogue Approved Signalling Items for the ARTC Network ESA-00-01 Applicability ARTC Network Wide SMS Publication Requirement Internal / External Primary Source Existing ARTC Type Approvals Document Status Version # Date Reviewed Prepared by Reviewed by Endorsed Approved 1.3 03 May 2021 Standards Stakeholders Manager General Manager Signalling Technical Standards Standards 03/05/2021 Amendment Record Amendment Date Reviewed Clause Description of Amendment Version # 1.0 23 Mar 20 First issue of catalogue that lists signalling items and communication items related to signalling systems approved for use on the ARTC network. 1.1 26 Jun 20 New approved items added based on type approval and compliance to ARTC specification 1.2 24 Nov 20 New approved items added based on type approval and compliance to ARTC specification © Australian Rail Track Corporation Limited (ARTC) Disclaimer This document has been prepared by ARTC for internal use and may not be relied on by any other party without ARTC’s prior written consent. Use of this document shall be subject to the terms of the relevant contract with ARTC. ARTC and its employees shall have no liability to unauthorised users of the information for any loss, damage, cost or expense incurred or arising by reason of an unauthorised user using or relying upon the information in this document, whether caused by error, negligence, omission or misrepresentation in this document. This document is uncontrolled when printed. Authorised users of this document should visit ARTC’s extranet (www.artc.com.au) to access the latest version of this document. -

AS 7651 Axle Counters
AS 7651:2020 Axle Counters Train Control Systems Standard Please note this is a RISSB Australian Standard® draft Document content exists for RISSB product development purposes only and should not be relied upon or considered as final published content. Any questions in relation to this document or RISSB’s accredited development process should be referred to RISSB. AS 7651:2020 RISSB Office Phone: AxleEmail: Counters Web: (07) 3724 0000 [email protected] www.rissb.com.au Overseas: +61 7 3724 0000 AS 7651 Assigned Standard Development Manager Name: Cris Fitzhardinge Phone: 0419 916 693 Email: [email protected] Draft for Public Comment AS 7651:2020 Axle Counters This Australian Standard® AS 7651 Axle Counters was prepared by a Rail Industry Safety and Standards Board (RISSB) Development Group consisting of representatives from the following organisations: Sydney Trains United Goninian Limited Queensland Rail Aldridge Transport for NSW Metro Trains Melbourne ARC Infrastructure Mott MacDonald Frauscher Australia Thales PTV Siemens PTA WA NJT Rail Services The Standard was approved by the Development Group and the Enter Standing Committee Standing Committee in Select SC approval date. On Select Board approval date the RISSB Board approved the Standard for release. Choose the type of review Development of the Standard was undertaken in accordance with RISSB’s accredited process. As part of the approval process, the Standing Committee verified that proper process was followed in developing the Standard RISSB wishes to acknowledge the positive contribution of subject matter experts in the development of this Standard. Their efforts ranged from membership of the Development Group through to individuals providing comment on a draft of the Standard during the open review. -

COUNTINGWORLD the Customer Magazine for Axle Counter Systems 09.2018
COUNTINGWORLD The Customer Magazine for Axle Counter Systems 09.2018 www.thalesgroup.com/germany CHALLENGING THE STATUS QUO LITECE™ PAVING THE WAY FOR SMART SENSING TECHNOLOGIES A RAILWAY ACROSS THE DESERT MOBILITY SOLUTIONS FOR THE TOUGHEST ENVIRONMENT ON THE PLANET THE “WARRIORS” CHOOSE THALES THALES FLAGSHIP AXLE COUNTER SYSTEM DEBUTS IN SAN FRANCISCO maintenance multiply? Is an increase in train In addition, finite element calculations and density justifiable when the operational cost simulation of environmental conditions are rises, but the number of passengers does not? suitable methodical instruments to get the basic It is, after all, the minimum level of safety required design right from the beginning. and affordable costs, i.e. the expected life cycle costs or investment costs, that determine Nothing replaces real life a supplier’s selection of signalling system or experience to confirm resilience product. and reliability Availability and punctuality become With the new Lite4ce™ smart sensor, Thales measurable decision criteria is introducing an entirely new concept of wheel sensing for Axle Counting Systems: an Neglected in contract award decisions in the unprecedented challenge for a track-based past due to a lack of success criteria, both signalling system – innovative and fascinating punctuality and availability are slowly becoming – but with limited ability to rely on decades of the evaluation pillars for performance-based operational experience. contracts. Fully redundant “2 out of 3” signalling system concepts have been on the signalling Lite4ce™ – at the forefront of Dear Readers, market for many years and have drastically sensor technology reduced if not mitigated the effects of single points RELIABILITY BY DESIGN of failures. -
West Midlands and Chilterns Route Utilisation Strategy Draft for Consultation Contents 3 Foreword 4 Executive Summary 9 1
November 2010 West Midlands and Chilterns Route Utilisation Strategy Draft for Consultation Contents 3 Foreword 4 Executive summary 9 1. Background 11 2. Dimensions 20 3. Current capacity, demand, and delivery 59 4. Planned changes to infrastructure and services 72 5. Planning context and future demand 90 6. Gaps and options 149 7. Emerging strategy and longer-term vision 156 8. Stakeholder consultation 157 Appendix A 172 Appendix B 178 Glossary Foreword Regional economies rely on investment in transport infrastructure to sustain economic growth. With the nation’s finances severely constrained, between Birmingham and London Marylebone, as any future investment in transport infrastructure well as new journey opportunities between Oxford will have to demonstrate that it can deliver real and London. benefits for the economy, people’s quality of life, This RUS predicts that overall passenger demand in and the environment. the region will increase by 32 per cent over the next 10 This draft Route Utilisation Strategy (RUS) sets years. While Network Rail’s Delivery Plan for Control out the priorities for rail investment in the West Period 4 will accommodate much of this demand up Midlands area and the Chiltern route between to 2019, this RUS does identify gaps and recommends Birmingham and London Marylebone for the next measures to address these. 30 years. We believe that the options recommended Where the RUS has identified requirements for can meet the increased demand forecast by this interventions to be made, it seeks to do so by making RUS for both passenger and freight markets and the most efficient use of capacity. -

System for Investigation of Railway Interfaces (SIRI)
6 System for Investigation of Railway Interfaces (SIRI) Sanjeev Kumar Appicharla 1Institution of Engineering and Technology 2The International Council on Systems Engineering, UK 1. Introduction This chapter presents an abstract system framework called ‘’System for Investigation of Railway Interfaces’’ (SIRI), to study potential or past railway accident(s). The aim of the study is to learn about the multiple causal factors (elements or conditions) which represented together can be called a cause leading to the undesired state called potential or accident situation. Safety studies like SIRI can be used in conjunction with the quantitative risk estimation method (PRA) to help highlight or uncover decisions leading to assumption of unreasonable risk or human error in engineering and management factors needs to be studied. Author accepts the viewpoint of George E.Apostolakis on the utility of quantitative risk analysis (QRA) or probability risk analysis ( PRA) techniques in general (E.Apostolakis 2004). The questions of human error and organisational learning are clarified later in the chapter in the context of acceptance of QRA method. The SIRI Framework uses synthetic mode of thinking as opposed to analytical mode of thinking. Analytical mode of thinking is like decomposing water which does no longer contains anything liquid and has taste. The SIRI Framework synthesises multiple study methods into a cohesive process represented as a system. The study methods used in stages to arrive at the decision of a potential accident situation in an unambiguous manner are Hazard identification method (HAZOP), Event Causal Factor Analysis (ECFA), Energy Barrier Trace Analysis (EBTA), accident investigation technique (MORT), and cognitive human factors framework (SRK) and systems thinking integrated into a cohesive system framework. -

Western Route Strategic Plan Version 8.0: Delivery Plan Submission March 2019
Western Route Strategic Plan Version 8.0: Delivery Plan submission March 2019 Western Route Strategic Plan Contents Foreword and summary ........................................................................................................................................................................................................... 3 Route objectives ..................................................................................................................................................................................................................... 10 Safety ..................................................................................................................................................................................................................................... 14 Train performance .................................................................................................................................................................................................................. 19 Locally driven measures ........................................................................................................................................................................................................ 24 Sustainability & asset management capability ....................................................................................................................................................................... 27 Financial performance ........................................................................................................................................................................................................... -

Central West System Information Pack
Queensland Rail does not warrant the fitness for purpose or accuracy of this information Central West System Information Pack Central West System Information Pack Version Information Version 3.0: 05/10/2016 • Removed Winton to Hughenden sections • Removed Clermont to Blair Athol Junction sections • Removed Nogoa to Springsure sections • Updated References Queensland Rail Network to Queensland Rail • Updated References Queensland Transport to DTMR • Removed reference 2005 Access Undertaking • EPA changed to Department • Updated Standards references • Updated Line Diagrams • Updated Climate Information • Updated Rail System Electrification • Updated Track Grade • Updated Network Control Regions & Singalling Centres • Updated Safeworking Systems • Update Noise Management System Issue 3.0 – October 2016 Page 1 of 85 Queensland Rail does not warrant the fitness for purpose or accuracy of this information Central West System Information Pack Table of Contents Introduction ...................................................................................................................................................... 4 General Information ......................................................................................................................................... 5 General Climate - Queensland Wide ............................................................................................................... 6 Cyclones ............................................................................................................................... -
Signalling Circuit Design Standards SDS 25
Discipline Engineering Standard –NSW Category Signalling Title Signalling Circuit Design Standards Reference Number SDS 25 –(RIC Standard: SC 00 14 00 00 SP) Document Control Status Date Prepared Reviewed Endorsed Approved GM Standards and Standards Infrastructure Safety Systems Engineer Strategy & Committee Issue 1 Mar 05 Performance Revision 2 Refer to Refer to minutes Reference H Olsen M Owens of meeting Number 12/08/04 Engineering Standard –NSW Signalling SDS 25 Signalling Circuit Design Standards DISCLAIMER Australian Rail Track Corporation has used its best endeavors to ensure that the content, layout and text of this document is accurate, complete and suitable for its stated purpose. It makes no warranties, express or implied, that compliance with the contents of this document shall be sufficient to ensure safe systems of work or operation. Australian Rail Track Corporation will not be liable to pay compensation in respect of the content or subsequent use of this document for any other purpose than its stated purpose or for any purpose other than that for which it was prepared except where it can be shown to have acted in bad faith or there has been willful default. DOCUMENT APPROVAL The technical content of this document has been approved by the relevant ARTC engineering authority and has also been endorsed by the ARTC Safety Committee. DOCUMENT SUPPLY and CONTROL The Primary Version of this document is the electronic version that is available and accessible on the Australian Rail Track Corporation Internet and Intranet website. It is the document user’s sole responsibility to ensure that copies are checked for currency against the Primary Version prior to its use. -
Singnalling for Track Engineers
November 2018 Indian Railways Institute of Civil Engineering Pune - 411001 FIRST EDITION : NOVEMBER 2018 70/- November 2018 Indian Railways Institute of Civil Engineering Pune - 411001 FOREWORD Indian Railway is one of the largest railway system in the world and spread in wide area. Safety and Punctuality demands up gradation of technology, modernization and adequate knowledge of field officials. It is felt since long to give professional response in track work connected to & dependent on signalling works. Engineering and signalling works when executed especially in yards require presence of each other. Therefore, Engineering officials need adequate technical knowledge about signalling appliances like track circuit, Axle counters and point machines. Instructions regarding track work in proximity of signals are scattered in form of Manuals, various policy instructions/ guidelines issued by Railway Board, RDSO from time to time. A necessity was therefore felt for compiling these instructions on this subject for quite some time. Shri Surendra Kumar Bansal, then Dean/IRICEN, Shri Niraj Kumar Mishra, Associate Professor/Track-1 & Shri Narendra Kumar Meher, Sr. Instructor/S&T-1 have made sincere efforts to fulfil this demand by bringing out this in book form. However, this book need review at frequent interval to keep it updated for authenticity. I hope that Civil Engineers of Railway will find it extremely informative and useful. Pune Ajay Goyal November 2018 Director / IRICEN / Pune PREFACE Safety is the first & foremost criteria in Indian railway followed by punctuality. It is impossible to deal safe running of trains without signaling arrangement. Signals give advance information regarding correct setting of routes and impart pre-warning to Loco pilots. -
State-Of-The-Art Wheel Detection and Axle Counting Systems
State-of-the-Art Wheel Detection and Axle Counting Systems Gerhard Grundnig © Frauscher Sensortechnik GmbH | 2012 © Frauscher Sensortechnik GmbH | 28 March 2012 Agenda 1. Innovative Wheel Detection and Axle Counting Systems 2. Company overview 3. Case Studies | References 4. Conclusion © Frauscher Sensortechnik GmbH | 28 March 2012 Wheel Detection Field of applications – axle counting systems – level crossings RSR 123 – switching tasks – measuring systems – diameter & speed measurement RSR 122 – customer-specific applications © Frauscher Sensortechnik GmbH | 28 March 2012 RSR 180 Axle Counting Systems Axle counting system ACS2000 (relay interface) for – Main lines – Metro / trams – Regional lines – Industrial lines © Frauscher Sensortechnik GmbH | 28 March 2012 Axle Counting Systems Axle counting system FAdC (serial interface) for – Main lines – Metro / trams – Regional lines – Industrial lines © Frauscher Sensortechnik GmbH | 28 March 2012 Axle Counting Systems • Permanent innovation leads to different axle counting systems – ACS2000: fail-safe relay interface – FAdC: fail-safe serial interface (or fail safe relay interface as an option) – FAdCi: fail-safe serial interface • Every axle counting platform consists of variable components • Based on proven FWD systems (Frauscher Wheel Detection) • Safe determination of clear/occupied (track vacancy) • Exhaustive diagnostic information © Frauscher Sensortechnik GmbH | 28 March 2012 Axle Counting Systems • Easy replacement of existing track circuit • Reliable counting of axles and fail-safe generation of Clear/Occupied message • Customized reset-function • Simple integration into any type of interlocking system • Serial interface affords compact interlocking systems with customer-specific and economic track vacancy detection (FAdC) • Modular and scalable design • Additional functionalities configurable (e.g. counting head control, driving direction, etc.) • Central and distributed architecture © Frauscher Sensortechnik GmbH | 28 March 2012 Axle Counting vs. -
Railwaysignalling.Eu Walk the Rail Talk
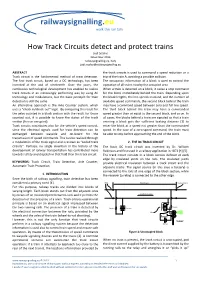
railwaysignalling.eu walk the rail talk How Track Circuits detect and protect trains Jodi Scalise November 2014 railwaysignalling.eu, Italy [email protected] ABSTRACT the track circuits is used to command a speed reduction or a Track circuit is the fundamental method of train detection. trip of the train A, avoiding a possible collision. The first track circuit, based on a DC technology, has been The occupancy information of a block is used to control the invented at the and of nineteenth. Over the years, the operation of all trains nearby the occupied area. continuous technological development has enabled to realize When a train is detected on a block, it cause a stop command track circuits in an increasingly performing way by using AC for the block immediately behind the train. Depending upon technology and modulations, but the basic principle for train the block lengths, the line speeds involved, and the number of detection is still the same. available speed commands, the second block behind the train An alternative approach is the Axle Counter system, which may have a command speed between zero and full line speed. uses a “check-in/check-out” logic. By comparing the result for The third block behind the train may have a commanded the axles counted in a block section with the result for those speed greater than or equal to the second block, and so on. In counted out, it is possible to know the status of the track all cases, the blocks behind a train are signaled so that a train section (free or occupied). -

Grade Crossings - Handbook
GRADE CROSSINGS - HANDBOOK 2016-12-14 RDIMS # 12526323 This document is meant to be used in conjunction with the Grade Crossings Regulations as well as the Grade Crossings Standards. i TABLE OF CONTENTS TABLE OF CONTENTS ........................................................................................................................ II FORWARD ............................................................................................................................................ 1 PART A – PREFACE .................................................................................................................................... 2 BACKGROUND ..................................................................................................................................... 2 OBJECTIVES ........................................................................................................................................ 3 DESCRIPTION ...................................................................................................................................... 4 ARTICLE 1 – INTERPRETATION ......................................................................................................... 7 ARTICLE 1.1 – AREMA INTERPRETATIONS ................................................................................... 13 ARTICLE 2 – CITATIONS ................................................................................................................... 14 ARTICLE 3 – UNITS OF MEASUREMENT .......................................................................................