Evaluation of Alternative Detection Technologies for Trains and Highway Vehicles at Highway Rail Intersections 6
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Derailment and Collision Between Coal Trains Ravenan (25Km from Muswellbrook), New South Wales, on 26 September 2018
Derailment and collision between coal trains Ravenan (25km from Muswellbrook), New South Wales, on 26 September 2018 ATSB Transport Safety Report Rail Occurrence Investigation (Defined) RO-2018-017 Final – 18 December 2020 Cover photo: Source ARTC This investigation was conducted under the Transport Safety Investigation Act 2003 (Commonwealth) by the Office of Transport Safety Investigations (NSW) on behalf of the Australian Transport Safety Bureau in accordance with the Collaboration Agreement Released in accordance with section 26 of the Transport Safety Investigation Act 2003 Publishing information Published by: Australian Transport Safety Bureau Postal address: PO Box 967, Civic Square ACT 2608 Office: 62 Northbourne Avenue Canberra, ACT 2601 Telephone: 1800 020 616, from overseas +61 2 6257 2463 Accident and incident notification: 1800 011 034 (24 hours) Email: [email protected] Website: www.atsb.gov.au © Commonwealth of Australia 2020 Ownership of intellectual property rights in this publication Unless otherwise noted, copyright (and any other intellectual property rights, if any) in this publication is owned by the Commonwealth of Australia. Creative Commons licence With the exception of the Coat of Arms, ATSB logo, and photos and graphics in which a third party holds copyright, this publication is licensed under a Creative Commons Attribution 3.0 Australia licence. Creative Commons Attribution 3.0 Australia Licence is a standard form licence agreement that allows you to copy, distribute, transmit and adapt this publication provided that you attribute the work. The ATSB’s preference is that you attribute this publication (and any material sourced from it) using the following wording: Source: Australian Transport Safety Bureau Copyright in material obtained from other agencies, private individuals or organisations, belongs to those agencies, individuals or organisations. -
Muswellbrook to Ulan Balloon Loop
Division / Business Unit: Enterprise Services Function: Operations Interface Document Type: Route Access Standard Route Access Standard HHN Section Pages H4 - Muswellbrook to Ulan Balloon Loop Applicability ARTC Network Wide SMS Publication Requirement External Only Primary Source Document Status Version # Date Reviewed Prepared by Reviewed by Endorsed Approved 1.7 Nov 2017 Manager Stakeholders Manager GM Technical Standards Procedures Standards Development Amendment Record Amendments to the RAS are published at the following link https://www.artc.com.au/uploads/RAS_Amendments_Register.xlsx © Australian Rail Track Corporation Limited (ARTC) Disclaimer This document has been prepared by ARTC for internal use and may not be relied on by any other party without ARTC’s prior written consent. Use of this document shall be subject to the terms of the relevant contract with ARTC. ARTC and its employees shall have no liability to unauthorised users of the information for any loss, damage, cost or expense incurred or arising by reason of an unauthorised user using or relying upon the information in this document, whether caused by error, negligence, omission or misrepresentation in this document. This document is uncontrolled when printed. Authorised users of this document should visit ARTC’s intranet or extranet (www.artc.com.au) to access the latest version of this document. CONFIDENTIAL Page 1 of 10 Route Access Standard HHN Section Pages H4 - Muswellbrook to Ulan Balloon Loop Muswellbrook to Ulan Balloon Loop 1 Muswellbrook to Ulan Balloon Loop NB: These line maps are indicative only and should be reviewed in conjunction with the legend on page 3. For more detailed map information refer to the ARTC website. -

Status of TTC 2015 06 Final.Pdf
Status of the Transportation U.S. Department of Transportation Technology Center - 2015 Federal Railroad Administration Office of Research, Development, and Technology Washington, DC 20590 DOT/FRA/ORD-16/05 Final Report March 2016 NOTICE This document is disseminated under the sponsorship of the Department of Transportation in the interest of information exchange. The United States Government assumes no liability for its contents or use thereof. Any opinions, findings and conclusions, or recommendations expressed in this material do not necessarily reflect the views or policies of the United States Government, nor does mention of trade names, commercial products, or organizations imply endorsement by the United States Government. The United States Government assumes no liability for the content or use of the material contained in this document. NOTICE The United States Government does not endorse products or manufacturers. Trade or manufacturers’ names appear herein solely because they are considered essential to the objective of this report. REPORT DOCUMENTATION PAGE Form Approved OMB No. 0704-0188 Public reporting burden for this collection of information is estimated to average 1 hour per response, including the time for reviewing instructions, searching existing data sources, gathering and maintaining the data needed, and completing and reviewing the collection of information. Send comments regarding this burden estimate or any other aspect of this collection of information, including suggestions for reducing this burden, to Washington Headquarters Services, Directorate for Information Operations and Reports, 1215 Jefferson Davis Highway, Suite 1204, Arlington, VA 22202-4302, and to the Office of Management and Budget, Paperwork Reduction Project (0704-0188), Washington, DC 20503. -

Herefordshire Green Infrastructure Strategy
Green Infrastructure Strategy Herefordshire Local Development Framework February 2010 This page is deliberately left blank CONTENTS Preface PART 1 1.0 INTRODUCTION 1.1 Background 1 1.2 What is Green Infrastructure? 3 1.3 Aims & Objectives of the Strategy 3 1.4 Report Structure 5 2.0 GREEN INFRASTRUCTURE IN CONTEXT 2.1 Origins & Demand for the Strategy 7 2.2 Policy Background & Relationship to Other Plans 7 2.2.1 National Policy 8 2.2.6 Regional Policy 10 2.2.7 Local Policy 10 2.2.8 Biodiversity Action Plan 11 2.2.9 Sustainable Community Strategy 11 2.3 Methodology 11 2.3.1 Identification of Assets 11 2.3.5 Assessment of Deficiencies & Needs 12 2.3.7 Strategic Geographic Tiers – Definition & Distribution 13 2.3.11 Sensitivity & Opportunity 16 2.3.13 Guiding Policies 16 2.3.14 Realising Green Infrastructure – the Delivery Mechanism 17 3.0 GREEN INFRASTRUCTURE ASSETS – ISSUES & OPPORTUNITIES 3.1 General 19 3.2 Strategic Geographic Tiers 21 3.3 Natural Systems - Geology 23 - Hydrology 29 - Topography 35 -Biodiversity 41 3.4 Human Influences - Land Use 49 -Access & Movement 55 - Archaeology, Historical & Cultural 63 - Landscape Character 71 - Designated & Accessible Open Space 81 3.5 Natural Resources Summary 91 3.6 Human Influences Summary 91 PART 2 4.0 THE GREEN INFRASTRUCTURE FRAMEWORK 4.1 General 93 4.2 A Vision for Green Infrastructure in Herefordshire 94 4.3 The Green Infrastructure Framework 95 4.3.1 Deficiencies & Needs 95 4.3.6 Strategic Tiers 98 4.3.7 County Vision 100 4.3.8 County Strategic Corridors 100 4.3.9 County Strategic Areas -
A Dccconcepts “Modelling Advice” Publication
A DCCconcepts “Modelling advice” publication DCC Advice #11 Page 1 Wiring Point-work & Special track conditions for DC or DCC Wiring the track… In plain English, with diagrams! If we had a $ or £ or € for every time we’ve been asked how to wire track and point-work, we’d be writing this on a beach somewhere while sipping a cold beer! A great layout needs good trackwork, so first - a word about trackwork and getting good performance. Choose carefully! DO think about making your own turnouts if you have even moderate skills. It is not as hard as you think, needs only basic skills and tools... and we do our best to make it easy with our top quality gauges, trackwork frets and templates. PLUS we will soon provide a detailed “How to make track” tutorial too. Interested? Then call or email us and we will do our best to help you. No matter what scale you will model in, DO NOT even consider using insulated frogs! Yes, lazy retailers who do not understand what they sell - and modellers who have never done a proper job of laying track so it runs well may well recommend it to you… but do NOT be tempted. No matter which brand makes the turnouts, if you use insulated frogs, you WILL have small locos stalling or also suffer from wider wheels bridging the frog tip and creating momentary shorts that are hard to fix and really are a source of constant frustration. Use more realistic rail sizes please: Usually this will be code 55 in N, or Code 75 and 83 in OO or HO Scale. -

Missoula County the WYE Targeted Economic Development District (TEDD) Comprehensive Development Plan
Missoula County The WYE Targeted Economic Development District (TEDD) Comprehensive Development Plan (Mapcarta, n.d.) Figure 1. Wye Area Adopted by the Missoula Board of County Commissioners 2020 Figure 2. Summit Drive Acknowledgements Missoula County Board of Commissioners, Josh Slotnick, Chair Missoula Development Authority, Dori Brownlow Community and Planning Services, Karen Hughes, Lindsey Romaniello, and Andrew Stickney Project Consultants – Community Development Services of Montana, Janet Cornish and Lanette Windemaker The WYE TEDD – Comprehensive Development Plan – 2020 Table of Contents Chapter Page 1. Introduction and Overview ........................................................................................ 1 2. Portrait of the WYE TEDD ........................................................................................... 6 3. Infrastructure Analysis - Statement of Infrastructure Deficiencies and Area Eligibility 13 4. Planning Consistency & Zoning Accordance with the Missoula County Growth Policy 17 5. Goals of the WYE TEDD ............................................................................................ 27 6. Targeted Economic Development Activities .............................................................. 31 7. Program Administration ........................................................................................... 38 8. Plan Amendments .................................................................................................... 41 References .................................................................................................................. -
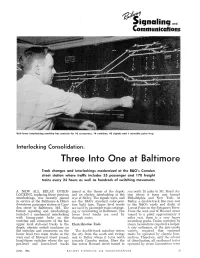
Interlocking Consolidation: Three Into One at Baltimore
~~ Siqnalinq and Communications Unit lever interlocking machine has controls for 10 crossovers, 14 switches, 45 signals and 1 movable point frog Interlocking Consolidation: Three Into One at Baltimore Track changes and interlockings modernized at the B&O's Camden ·street station where traffic includes 55 passenger and 170 freight trains every 24 hours as well as hundreds of switching movements A NEvV ALL RELAY INTER joined at the throat of the depot; run north H~ miles to Nit. Royal sta LOCKING, replacing three previous and an electric interlocking at the tion where it turns east toward interlockings, was recently placed wye at Bailey. The signals were, and Philadelphia and New York. At in service at the Baltimore & Ohio's are the B&O's standard color-posi Bailey, a double-track line runs east downtown passenger station at Cam tion light type. Upper level tracks to the B&O's yards and docks at den street in Baltimore, 11d. The are used by passenger trains originat Locust Point on the Patapasco River. former signaling and interlockings ing or terminating at Baltimore. The From the west end of Howard street included a mechanical· interlocking lower level tracks are used by tunnel to a point approximately 3 with facing-point locks on the through trains. miles east, there is a very heavy switches and crossovers of the five ascending grade. Trains operated by upper level stub-end tracks in the Electrification Ends steam locomotives required a helper. depot; electric switch machines on A city ordinance, of the anti-smoke the switches and crossovers on the The double-track mainline enters variety, required that eastward lower level two main tracks at the the city from the south and swings trains be operated by electric loco west end of Howard street tunnel; east to Bailey where it turns north motives. -
Scalefour Southwest Guide 2012 V2 Package
Scalefour SouthWest Guide 2012 SCALEFOUR SOUTHWEST 2012 a part of RAILWELLS The Town Hall, Market Place, Wells, Somerset BA5 2RB Saturday 11 August - 10.30 to 17.30 Sunday 12 August - 10.30 to 17.00 Adult - £5.00 Seniors - £4.00 Unaccompanied Children - £4.00 Accompanied children under 15 - free Website: www.railwells.com Photo: Wells Tourist Office Touris............................. Society members can use their Saturday tickets on Sunday also, but must show their membership card and have their ticket endorsed on Saturday. As we say every year, because we believe it: Railwells has become a very special show in the railway modelling calendar. Once again it is being held in the delightful setting of Wells Town Hall. Railwells includes Scalefour Southwest as an integral part of this annual event. Scalefour Southwest is an annual part of the exhibition, and this year is joined by a special section for EM Gauge, complemented by demonstrators showing how to convert to and model in EM. The exhibition has two layouts under construction to show you how, Black Lion Crossing by Geoff Kent and Bristol Barrow Road by Robin Whittle. There will be at least 50 exhibits this year including 14 layouts, 17 traders, as well as how-to demonstrations and other displays with emphasis on layout and stock construction. Whether you are considering constructing a layout or not it is always interesting to see what someone else has done. All this will make the show well worth a visit. Refreshments Available all day, starting with breakfast baguettes and going on to ploughman's lunches and afternoon tea and cake. -

Overview of Wheel/Rail Load Environment Caused by Freight Car Suspension Dynamics
34 TRANSPORTATION RESEARCH RECORD 1241 Overview of Wheel/Rail Load Environment Caused by Freight Car Suspension Dynamics SEMIH KALAY AND ALBERT REINSCHMIDT It has been a well-established fact that excessive wheel/rail loads dynamic load factors that represent only the effects of max cause accelerated wheel/rail wear, truck component deterioration, imum dynamic load conditions (7). The most serious problem track damage, and increased potential for derailment. The eco with these types of assumptions is that they neither make any nomic and safety impact of the increased wheel rail loads can only distinction for the effects of suspension design used in differ be ascertained by a total characterization of the wheel/rail loads. In this paper, a comprehensive set of experimental results obtained ent types of freight cars nor describe the variety of track from on-track testing of conventional North American freight cars conditions found in revenue service. Ideally, for design of using both wayside and on-board measurement systems are pre track and fretgh:t car structures, a total description of the load sented. The particular emphasis is given to the wheel/rail loads spectra including low-frequency high-dynamic loads should resulting from suspension dynamics. The dynamic wheel/rail envi be used (8). ronment addressed in this paper is limited to dynamic performance Our purpose in this paper is to provide an overall under regimes such as rock-and-roll and pitch-and-bounce, hunting, and standing of the dynamic load environment encountered under curving. The strong dependence of the dynamic response of a railway vehicle on a truck suspension system has been illustrated typical North American freight cars. -
Approved Signalling Items for the ARTC Network ESA-00-01
Division / Business Unit: Corporate Services & Safety Function: Signalling Document Type: Catalogue Approved Signalling Items for the ARTC Network ESA-00-01 Applicability ARTC Network Wide SMS Publication Requirement Internal / External Primary Source Existing ARTC Type Approvals Document Status Version # Date Reviewed Prepared by Reviewed by Endorsed Approved 1.3 03 May 2021 Standards Stakeholders Manager General Manager Signalling Technical Standards Standards 03/05/2021 Amendment Record Amendment Date Reviewed Clause Description of Amendment Version # 1.0 23 Mar 20 First issue of catalogue that lists signalling items and communication items related to signalling systems approved for use on the ARTC network. 1.1 26 Jun 20 New approved items added based on type approval and compliance to ARTC specification 1.2 24 Nov 20 New approved items added based on type approval and compliance to ARTC specification © Australian Rail Track Corporation Limited (ARTC) Disclaimer This document has been prepared by ARTC for internal use and may not be relied on by any other party without ARTC’s prior written consent. Use of this document shall be subject to the terms of the relevant contract with ARTC. ARTC and its employees shall have no liability to unauthorised users of the information for any loss, damage, cost or expense incurred or arising by reason of an unauthorised user using or relying upon the information in this document, whether caused by error, negligence, omission or misrepresentation in this document. This document is uncontrolled when printed. Authorised users of this document should visit ARTC’s extranet (www.artc.com.au) to access the latest version of this document. -

AS 7651 Axle Counters
AS 7651:2020 Axle Counters Train Control Systems Standard Please note this is a RISSB Australian Standard® draft Document content exists for RISSB product development purposes only and should not be relied upon or considered as final published content. Any questions in relation to this document or RISSB’s accredited development process should be referred to RISSB. AS 7651:2020 RISSB Office Phone: AxleEmail: Counters Web: (07) 3724 0000 [email protected] www.rissb.com.au Overseas: +61 7 3724 0000 AS 7651 Assigned Standard Development Manager Name: Cris Fitzhardinge Phone: 0419 916 693 Email: [email protected] Draft for Public Comment AS 7651:2020 Axle Counters This Australian Standard® AS 7651 Axle Counters was prepared by a Rail Industry Safety and Standards Board (RISSB) Development Group consisting of representatives from the following organisations: Sydney Trains United Goninian Limited Queensland Rail Aldridge Transport for NSW Metro Trains Melbourne ARC Infrastructure Mott MacDonald Frauscher Australia Thales PTV Siemens PTA WA NJT Rail Services The Standard was approved by the Development Group and the Enter Standing Committee Standing Committee in Select SC approval date. On Select Board approval date the RISSB Board approved the Standard for release. Choose the type of review Development of the Standard was undertaken in accordance with RISSB’s accredited process. As part of the approval process, the Standing Committee verified that proper process was followed in developing the Standard RISSB wishes to acknowledge the positive contribution of subject matter experts in the development of this Standard. Their efforts ranged from membership of the Development Group through to individuals providing comment on a draft of the Standard during the open review. -

FOR PUBLICATION UT4 Maintenance Submission
FOR PUBLICATION 30 April 2013 UT4 Maintenance Submission THIS PAGE INTENTIONALLY BLANK UT4 Maintenance Submission 30th April 2013 TABLE OF CONTENTS Definitions and Abbreviations vii Executive Summary 10 1. Background 16 1.1 Submission Document Structure .................................................................................................... 16 1.2 Submission Development Process ................................................................................................ 17 1.2.1 Key Assumptions ...................................................................................................................... 19 1.2.2 Efficiency Gains ........................................................................................................................ 20 1.2.3 Use of External Expertise ...................................................................................................... 20 1.2.4 Maintenance Cost Index......................................................................................................... 20 1.2.5 Internal Experts ......................................................................................................................... 21 1.3 Aurizon Network’s Business Structure .......................................................................................... 23 1.3.1 Business Structure History .................................................................................................... 23 1.3.2 Aurizon Network’s Operational Structure .........................................................................