The Study of the Process of the Development of Marine Robotics
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Il Premio Silio Taddei 2008-2009 a Nome Del Rotary Club Di Livorno, Mi È Rio Di Pesaro Sotto La Direzione Del Maestro Pietro Mascagni
PUBBLICAZIONE DI INFORMAZIONE ROTARIANA E CULTURALE RISERVATA AI SOCI Bollettino n. 1999 - Anno LXIII - Marzo / Aprile 2009 - Finito di stampare nel mese di Maggio 2009 2 Uno sguardo sul “vecchio” Rotary Mario Cesari 3 Il terremoto in Abruzzo Giuseppe Giannelli 4 Presenze I semestre Anno Rotariano 2008-2009 5 I programmi di Maggio, Giugno e gli auguri 6 Le Riunioni 11 Il Bollettino mensile nato con aspirazioni di Rivista Lorenzo Di Cosimo 13 Breve storiadei trapianti di organo Giuseppe Marcacci 15 La Folgore in Afghanistan Comm.te Rosario Castellano 17 Whitehead: 133 anni di storia Benito Petrucci Il Premio Silio Taddei 2008-2009 A nome del Rotary Club di Livorno, mi è rio di Pesaro sotto la direzione del Maestro Pietro Mascagni. grato porgere a tutti voi il mio saluto ed il La prima borsa di studio è stata assegnata nel 1991 alla vivo ringraziamento per essere intervenuti giovane musicista Kahouru Arima diplomata in pianoforte così numerosi a questa serata che assume al conservatorio di Pesaro e da allora altre 17 borse di studio un rilievo particolare per la presenza del e tre premi speciali sono stati assegnati a giovani diplomati Comandante dell’Accademia Navale, Ammiraglio Raffa- presso i conservatori musicali di Pesaro e Firenze ai quali, ele Caruso, accompagnato dalla gentile consorte dott.ssa da due anni, sono stati aggiunti quelli degli Istituti Musicali Antonella La Malfa e di una folta presenza di Ufficiali. “Mascagni” di Livorno e “Boccherini” di Lucca. Un saluto particolare agli Allievi che con la loro presenza Nel marzo del 2001, la Prof.ssa Lina Taddei, per garantire danno un tono di particolare eleganza e di fresca giovinezza continuità di attuazione delle finalità, ha voluto affidare a questa serata. -

EARLY DEVELOPMENT and STABILIZATION of the Whitehead TORPEDO
II. MEđuNARODNA KONFERENCIJA O INDUSTRIJSKOJ BAštINI 331 EARLY DEVELOPMENT AND STABILIZATION OF THE WHITEHEAD TORPEDO Rani razvoj i stabilizacija Whiteheadova torpeda Dipl. Ing. Helmut W. Malnig* Osterreische Ingenieur und Architeckten – Verein, Vienna, Austria Summary In the face of a superior French fleet which harassed the Northern Adriatic and the Quarnero in 1859 the Austrian chemist / mechanic Franz Pfeifer proposed the idea of an unmanned littoral explosive boat to the Austrian admirality. This was realized in 1864 by the Imperial-Royal Commander (k.k. Fregattenkapitän) Giovanni Lup- pis (1813 – 1875), a native of Fiume (Rijeka), who built a model of an automotive (spring- driven), line-guided explosive boat – the “Salvacoste”. Due to inherent design deficiencies the Austrian naval authorities requested the ingenious English engineer and industrialist Robert Whitehead (1823 – 1905) in Fiume, where his company STF was employed on government contracts, to cooperate with Luppis.1866 the resulting weapon the “Whitehead fish-torpedo”- differed considerably to the dismay of Luppis from his original concept It was a fully submersible, automotive, and stealth weapon, conceived to deliver a lethal punch into the soft belly of an enemy ship. Depth was at first erratic but later regulated by an improved hydrostatic device the: “Whitehead’s Se- cret”. Lateral stabilization via launching tube and fins still proved inadequate at longer range, though 1872 uni-axially counter-rotating propellers improved the situation. The torpedo revolutionized naval warfare: novel ship. types and –building, naval thought and tactics were affected. No patents were applied for protection of this inven- tion and the k.k. Marine waived any priority claims. -

Full Spring 2004 Issue the .SU
Naval War College Review Volume 57 Article 1 Number 2 Spring 2004 Full Spring 2004 Issue The .SU . Naval War College Follow this and additional works at: https://digital-commons.usnwc.edu/nwc-review Recommended Citation Naval War College, The .SU . (2004) "Full Spring 2004 Issue," Naval War College Review: Vol. 57 : No. 2 , Article 1. Available at: https://digital-commons.usnwc.edu/nwc-review/vol57/iss2/1 This Full Issue is brought to you for free and open access by the Journals at U.S. Naval War College Digital Commons. It has been accepted for inclusion in Naval War College Review by an authorized editor of U.S. Naval War College Digital Commons. For more information, please contact [email protected]. Naval War College: Full Spring 2004 Issue N A V A L W A R C O L L E G E NAVAL WAR COLLEGE REVIEW R E V I E W Spring 2004 Volume LVII, Number 2 Spring 2004 Spring N ES AV T A A L T W S A D R E C T I O N L L U E E G H E T R I VI IBU OR A S CT MARI VI Published by U.S. Naval War College Digital Commons, 2004 1 Color profile: Disabled Composite Default screen Naval War College Review, Vol. 57 [2004], No. 2, Art. 1 Cover A Landsat-7 image (taken on 27 July 2000) of the Lena Delta on the Russian Arctic coast, where the Lena River emp- ties into the Laptev Sea. The Lena, which flows northward some 2,800 miles through Siberia, is one of the largest rivers in the world; the delta is a pro- tected wilderness area, the largest in Rus- sia. -

Robert Whitehead – the English Engineer
I. međunarodna konferencija u povodu 150. obljetnice tvornice torpeda u Rijeci i očuvanja riječke industrijske baštine 85 ROBERT WHITEHEAD – THE ENGLISH ENGINEER Edwyn Gray Research service, Attleborough, England When Robert Whitehead died on November 14th 1905 the Times newspaper drew attention to his lack of official recognition in England and observed: ‘Quite unaccountably (his invention) has brought him no public recognition in the form of honours or distinctions he received (an) abundance, but he must have felt, as we believe he did, that the neglect of his own country was thereby rendered the more conspicuous’.(1) Despite the publication of Robert’s biography in 1975 followed by the enlarged edition issued by the Naval Institute Press in 1991, his engineering achievements and his influence on naval warfare remain largely unacknowledged and unremembered in Britain beyond the restricted circles of naval history enthusiasts. It is ironic, therefore, that in has fallen to Croatia, and in particular, Rijeka, to honour him in this conference. Family letters reveal that the ‘old gentleman’ relished the glittering foreign honours he received from all over the world during his lifetime and I am quite sure he would have been both astonished and pleased by this tribute to his work by the citizens of Rijeka whom he truly loved, respected, and admired.(2) In a letter to her brother James, Whitehead’s daughter Alice revealed her father’s delithted reaction to various proposals by the local townspeople to honour him when he paid off the debts of the bankrupt Stabilmento Tecnico Fiumano on purchasing the factory in 1875 although he was under no legal obligation to do so. -

Accommodation
Emerald Cultural Institute STUDENT HANDBOOK WORTH SCHOOL, SUSSEX EXPERIENCE TRADITION, EMBRACE INNOVATION. eci.ie WELCOME TO EMERALD UK We would like to welcome you to Worth School, Sussex and wish you a great stay full of new ideas, inspiration, fun and lasting memories. This handbook will provide you with some information about Worth School, the programme, what to expect, your role and what to bring with you. WORTH SCHOOL ADDRESS ‘You can’t fault it’ The Good School Guide. Paddockhurst Rd, Worth School was originally owned by Lord Cowdray Turners Hill, and was part of his country estate. It was sold to Crawley, Downside Abbey in 1933 and became both a school and a Benedictine Abbey. Worth is set in 500 acres of RH10 4SDGL7 7HA beautiful countryside in an area of outstanding natural beauty, in Sussex, close to both London and Brighton and only 10 minutes from Gatwick airport. A1 (M1) M11 M1 A previous owner, Robert Whitehead had made his fortune as the developer of the first self-propelled M25 torpedo in the 1860s and is linked to Worth’s long St.Pancras A127 connections with Austria and Germany. Whitehead’s Eurostar descendants include his granddaughter who married A13 M4 London Herbert von Bismarck, the eldest son of the great City Ebbsfleet Heathrow International Chancellor Otto von Bismarck, and his granddaughter M2 Agathe Whitehead who was the first wife of Georg von M3 Trapp, and the mother to his children. Captain von M25 A3 Trapp remarried after her death and became famous M20 as the patriarch of the von Trapp Family Singers who were portrayed in the semi-fictional stage play and film M23 ‘The Sound of Music’. -
Mechanism So Marvelous In
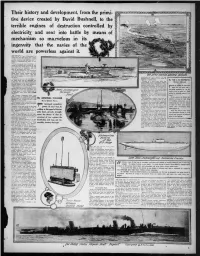
¬ Their history and development from the primi- 3 I tive device created by David Bushnell to the terrible engines of destruction controlled by i electricity and sent into battle by means of mechanism so marvelous in its u 1 ingenuity that the navies of the j I world are powerless against it J bank and by its light I discovered the unfortunate fact that there was a circle of logs around the Albemarle boomed well out from her side with the very In- ¬ tention of preventing the action of tor- pedoes I ran alongside until amidships re- ¬ ceived the enemys fire sheered oil and as I turned the whole back of my coat was torn out by buckshot and the soles of my shoes shot away In another Instant we had struck the logs and were over with headway nearly gone slowly forging up under 5 K the enemys quarter port Ten feet = gun looked into 7 Zi5on 4t W from us the muzzle of a hO our faces- prophesied Just such disaster as the r suffered I stood In the bow the heel jigger in Russians have at the hands of my right the exploding line = Japanese torpedo boats By SIR J X HOPKINS hand and Strange as may seem I I in the left We were near enough then r it there has never before been a practical demon- British Admiral and I ordered the boom lowered until the A forward mptlon of the boat carried the stration of the destructivepowers of the ¬ Vi O Modern torpedo boat With the excep- < > torpedo under the rams overhang destruction HAVE no opinion of submarine The explosion took place at the same tion of the of three Chinese cruisers that were not the time able -

Of the Whitehead Torpedo Factory of Fiume
I. međunarodna konferencija u povodu 150. obljetnice tvornice torpeda u Rijeci i očuvanja riječke industrijske baštine 201 THE “ITALIAN PERIOD” OF THE WHITEHEAD TORPEDO FACTORY OF FIUME (RIJEKA) AND THE FOUNDATION IN LIVORNO OF WHITEHEAD MOTO FIDES (WMF - 1945) AND OF WHITEHEAD ALENIA SISTEMI SUBACQUEI (WASS –1995) Benito Petrucci, ing. Livorno, Italia FOREWORD The “italian period” of the Whitehead Torpedo Factory of Fiume, goes from 24th January 1924 to 3rd May 1945, lasting altogether, a bit more than 21 years. As compared to the period of 150 years (associated to the celebration of the foundation of the Fonderia Metalli), or even to the period of 128 years (associated to the foundation of the Whitehead Torpedo Factory), it appears to be quite short and could give the idea of not being sufficiently significant and important for the Company. But if we take a look to other aspects than simply to the duration of the period during which the Company was under the italian laws, was property of italian capitals and managed by italian staff, it may be noticed that the italian influence has been present in the life of the Company for a much longer period than that associated to the simple material property, and has deeply permeated its character and attitude. As a confirmation of what hereby asserted, it may be considered the fact that the first name of the company today under celebration was Fonderia Metalli, changed later in Stabilimento Tecnico in Fiume (currently Stabilimento Tecnico Fiumano), both italian names, and its statute was published in italian language (figgs.1a, 1b). -

Robert Whitehead
Robert Whitehead By Vivien Moss Torpedoed! We say this when we are suddenly prevented from doing something we really wanted to do. The ground has been swept away from underneath our feet. I’m going to tell you something about a former Shrivenham resident, a world- famous man. Robert Whitehead was the inventor of the first self-propelled torpedo; a deadly underwater weapon. He spent the last few years of his life living in Beckett House – he rented it from Lord Barrington – and died there in 1905. Several members of his family also moved there to be near him and either bought or rented property nearby. You will also hear a little about the “Sound of Music” So, what was it that made this man so famous and well known throughout Europe? And what was it that brought him to rent Beckett House from Lord Barrington? He came from humble beginnings. His father worked as a bleacher in a cotton mill in Bolton. Robert left his Grammar School in Bolton at the age of 14 and went to the Mechanics Institute, Manchester in order to become an apprentice engineer. He qualified as an engineer and also as a draughtsman and then went to work for his uncle in France. Three years later, at the age of 24 he sought independence, started his own business which was marine engineering and formed his own company in Milan. This company was very successful, and he designed and built marine engines for Austrian warships. When the Austrian Government suggested making a weapon carrying an explosive, it kept Robert occupied for several years before he perfected his first torpedo in 1870 which you can see below, is cigar-shaped and this first one had a range of about 700 yards. -

Torpedo* Torpedo, Tvornica Oružja, Motora I Vozila Osnovana 1853
434 POVIJEST HRVATSKE INDUSTRIJE, Kem. Ind. 69 (7-8) (2020) 434–435 POVIJEST HRVATSKE INDUSTRIJE Torpedo* Torpedo, tvornica oružja, motora i vozila osnovana 1853. u Rijeci pod imenom Ljevaonica metala (Fonderia Metalli) kao industrijsko poduzeće za proizvodnju predmeta od željeza i pedo Fabrik von Robert Whitehead, poslije Whitehead & Co.). izvedbu mehaničarskih radova u brodogradnji. Orijentiravši se na masovnu proizvodnju i razvoj torpeda, tvor- nica ih je 1881. izvozila po cijelome svijetu, nastojeći zadovoljiti veliku potražnju. U britanskome gradu Weymouthu osnovana je vornicu su osnovali najugledniji domaći novčari, brodovla- 1891. podružnica Whitehead Torpedo Works Ltd., koja je proi- snici, trgovci i tvorničari. Usprkos tomu isprva je poslova- zvodila torpeda isključivo za potrebe britanske ratne mornarice. la skromno, trošila je tek 28 t željeza na godinu a potkraj Neposredno prije svoje smrti Whitehead je tvornicu pretvorio u T1857. imala je samo 25 zaposlenih. Iako je raspolagala vlastitom dioničarsko društvo te su većinski paket dionica preuzela 1906. ljevaonicom željeza i parnim strojem snage 20 KS (14,9 kW), velika engleska poduzeća Vickers Ltd. i Armstrong Whitworth & zbog nedovoljnih novčanih sredstava i lošeg vođenja nije mogla Co. Unatoč promjeni vlasničke strukture, tvornica je nastavila prerasti okvire veće zanatske radionice. Stoga su dioničari stupili uspješan razvoj. Riječka je tvornica i u novim uvjetima nastavila u pregovore s engleskim poduzetnikom i tehničarom Robertom surađivati s britanskom mornaricom, kao i s ratnim mornaricama Whiteheadom, koji je već uspio malu tršćansku ljevaonicu Fon- i vladama drugih zemalja te s poduzećima koja su u razdoblju deria Strudthoff pretvoriti u najvećega dobavljača parnih kotlova 1912. – 1914. pokrenula proizvodnju Whiteheadovih torpeda austrougarske mornarice. -

Spomenička Baština Rijeke Posvećena Industrijiskoj Tradiciji Grada
Spomenička baština Rijeke posvećena industrijiskoj tradiciji grada Mrkobrada, Marija Master's thesis / Diplomski rad 2017 Degree Grantor / Ustanova koja je dodijelila akademski / stručni stupanj: University of Rijeka, Faculty of Humanities and Social Sciences / Sveučilište u Rijeci, Filozofski fakultet Permanent link / Trajna poveznica: https://urn.nsk.hr/urn:nbn:hr:186:872505 Rights / Prava: In copyright Download date / Datum preuzimanja: 2021-10-06 Repository / Repozitorij: Repository of the University of Rijeka, Faculty of Humanities and Social Sciences - FHSSRI Repository Sveuĉilište u Rijeci Filozofski fakultet Odsjek za povijest umjetnosti SPOMENIĈKA BAŠTINA RIJEKE POSVEĆENA INDUSTRIJSKOJ TRADICIJI GRADA DIPLOMSKI RAD Mentorica: dr.sc.Julija Lozzi Barković, red. prof. Diplomantica: Marija Mrkobrada 0009060173 Rijeka, 9. veljaĉe2017. SAŢETAK Grad Rijeka svoj današnji izgled duguje razdoblju industrijalizacije. Zahvaljujući izlazu na more i blizini rijeke Rjeĉine u mogla se razvijati brodograĊevna industrija i razne druge industrijske djelatnosti. Prvi industrijski pogon u Rijeci bila je Tvornica papira još u 19. stoljeća nakon ĉega je zapoĉela cjelokupna industrijalizacija grada. Danas se grad sastoji od nekoliko industrijskih podruĉja koja su se tijekom stoljeća širila i razvijala te time stvorila bogatu ostavštinu posvećenu industrijskoj tradiciji grada. U prvom dijelu rada objašnjava se pojam industrijske baštine. Industrijska baština jedna je od najznaĉajnijih ostavština koja dokumentira razvoj gradova u posljednja dva stoljeća, posebno na podruĉju tehnoloških dostignuća i urbanog razvoja gradova. Isto tako navodi se da je grad Rijeka industrijski grad te se ukratko opisuje povijest nastanka industrijskih podruĉja kao i njihovi najvaţniji lokaliteti nastali za vrijeme industrijalizacije. Nakon uvodnog dijela u kojem se potvrdilo da je grad Rijeka upravo industrijski grad, navode se javni spomenici, fontane, napušteni kompleksi i objekti posvećeni industrijskoj tradiciji grada. -
Alvie and Dalraddy Estates Location
Alvie and Dalraddy Estates Location Alvie & Dalraddy are adjoining Estates that are run as one land holding located 4 miles south of Aviemore near the village of Kincraig within the district of Badenoch. Badenoch is approximately the geographic centre of Scotland. The Estates extend from the River Spey, between Loch Insh and Loch Alvie, North West into the Monadhliath hills. Most of the properties on the Estates face South East many with spectacular views of the Cairngorm Mountains. A stone circle at Delfour on Alvie Estate which is thought to date from around 2,000 BC is evidence that this land has been inhabited, managed & fought over by humans for at least the last 4,000 years. 39% of the land area of the two Estates is within the Cairngorms National Park. This includes all the low ground. The Estates are entirely within the Highland Region and the Kincraig & Vicinity Community Council area. Alvie & Dalraddy Estates 2018 Facts & Figures Area The geographical area is based on traditional land ownership patterns when the primary use of land was to produce food. In the 17th and 18th century farms required a proportion of low ground that could be both cultivated for food and winter livestock. Upland pastures were required for summer grazing. As a result, land holdings tend to be strips of land extending from the valley floor into the hills. (See map) The land use by area is: Land Use hectares acres % % Stocked woodland conifer 720 1,780 13% broadleaf 93 230 2% Unstocked woodland bare ground 137 339 2% unplantable /open 89 230 2% 19% Farmland -
Rijeka's Torpedo Launch Pad Station Preservation
RIJEKA’S TORPEDO LAUNCH PAD STATION PRESERVATION Ivan Marović University of Rijeka, Faculty of Civil Engineering, Rijeka, Croatia [email protected] Ivica Završki University of Zagreb, Faculty of Civil Engineering, Zagreb, Croatia [email protected] Diana Car-Pušić University of Rijeka, Faculty of Civil Engineering, Rijeka, Croatia [email protected] From the middle of 19th century till the middle of 20th century Rijeka’s industrial developments were known world wide. One such unique and genuine development for sure is a torpedo. Every torpedo had to pass very difficult testing processes therefore it was necessary to build such facility which enabled simulation of all launch positions. Today, Torpedo launch pad station facility has attribute of cultural good although is rather devastated. Consequently, this paper will give an overview of what should have been done and was not, and an overview of what is being done to salvage and preserve such an important and unique monument of technological activities of Rijeka and its citizens that endures time. KEYWORDS: industrial heritage, maintenance management, preservation, reuse. INTRODUCTION City of Rijeka is situated on the shore of Kvarner bay, the northernmost part of Adriatic Sea, where the Mediterranean is closest to the countries of middle Europe. As being in background of Kvarner, Dinaric Alps are at lowest altitude therefore is the easiest crossover from sea side deeper into land towards European countries. Good geographical position of Rijeka provided good communication post, which was first noticed by Romans and Greeks, and can be found in charts of famous chart maker Claudius Ptolemaeus. Industrial developments in Rijeka are strictly connected with developments which followed the Industrial Revolution such as development of steam engine.