Multiview Depth Video Compres
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Dynamic Accommodative Response to Different Visual Stimuli
Ophthalmic & Physiological Optics ISSN 0275-5408 Dynamic accommodative response to different visual stimuli (2D vs 3D) while watching television and while playing Nintendo 3DS Console Sı´lvia Oliveira, Jorge Jorge and Jose ´ M Gonza ´ lez-Me ´ ijome Clinical and Experimental Optometry Research Lab, Centre of Physics (Optometry), School of Sciences, University of Minho, Braga, Portugal Citation information: Oliveira S, Jorge J & Gonza ´ lez-Me ´ijome JM. Dynamic accommodative response to different visual stimuli (2D vs 3D) while watching television and while playing Nintendo 3DS Console. Ophthalmic Physiol Opt 2012, 32 , 383–389. doi: 10.1111/j.1475-1313.2012.00934.x Keywords: 3D television, accommodative Abstract response, Nintendo 3DS, three dimensions Purpose: The aim of the present study was to compare the accommodative Correspondence : Sı´lvia Oliveira response to the same visual content presented in two dimensions (2D) and ste- E-mail address: [email protected] reoscopically in three dimensions (3D) while participants were either watching a television (TV) or Nintendo 3DS console. Received: 06 January 2012; Accepted: 18 July Methods: Twenty-two university students, with a mean age of 20.3 ± 2.0 years 2012 (mean ± S.D.), were recruited to participate in the TV experiment and fifteen, with a mean age of 20.1 ± 1.5 years took part in the Nintendo 3DS console study. The accommodative response was measured using a Grand Seiko WAM 5500 autorefractor. In the TV experiment, three conditions were used initially: the film was viewed in 2D mode (TV2D without glasses), the same sequence was watched in 2D whilst shutter-glasses were worn (TV2D with glasses) and the sequence was viewed in 3D mode (TV3D). -

Dimensional Television Just a Fashion That Comes and Goes Like A
Broadcasting Has 3D TV come of age? Everyone wants to know: is three- dimensional television just a fashion that comes and goes like a spring clothing collection? Or will it be different this time? The 2010 FIFA World Cup in South Africa and the 2012 Summer Olympic AFP Games in London will include 3D television coverage, heightening the public’s appetite for this new viewing experience. 4 ITU News 2 | 2010 March 2010 Has 3D TV come of age? Broadcasting ITU/V. Martin ITU/V. D. Wood Christoph Dosch David Wood Chairman of ITU–R Chairman of ITU–R Study Group 6 Working Party 6C Has 3D TV come of age? Everyone wants to know: is three-dimensional tel- There are indications that, if ever 3D TV was go- evision (3D TV) just a fashion that comes and goes ing to succeed, now is the time. A confl uence of fac- like a spring clothing collection? That is rather how it tors means that the quality of 3D TV is going to be has been regarded before — more than once. About higher than was ever possible before. But with a his- every 25 years, since the beginning of the twentieth tory of “boom and bust”, and arguably with some century, 3D catches the public (and business) imagi- eye fatigue issues still unresolved, is this the time for nation. Each time its star fades. But each time its se- the viewer or industry to invest in 3D TV? The answer crets are kept alive by enthusiasts. is that no one knows for sure, but success or failure Will it be different this time? Will the technology in agreeing common technical standards will play a be able to permanently win audiences for television, part. -

Hi3716m V430 Hi3716m V430 Cable HD Chip Brief Data Sheet
Hi3716M V430 Hi3716M V430 Cable HD Chip Brief Data Sheet Key Specifications CPU Graphics and Display Processing (Imprex 2.0 High-performance ARM Cortex-A7 processor Processing Engine) Built-in I-cache, D-cache, and L2 cache Hardware TDE Hardware Java acceleration 3-layer OSD Floating-point coprocessor Two video layers Memory Control Interfaces 16-bit and 32-bit color depth DDR3/DDR3L interface Full-hardware anti-aliasing and anti-flicker − Maximum capacity of 512 MB for an external DDR IE, NR, and CCS SDRAM or of 128 MB/256 MB for a built-in DDR DEI SDRAM Audio and Video Interfaces − 16-bit data width PAL, NTSC, and SECAM standard outputs, and forcible A SPI NOR flash/SPI NAND flash, a parallel SLC NAND standard conversion flash, or a SPI NOR flash+a parallel SLC NAND flash Aspect ratio of 4:3 or 16:9, forcible aspect ratio Video Decoding (HiVXE 2.0 Processing Engine) conversion, and free scaling H.265 Main/Main 10@Level 4.1 high-tier 1080p50(60)/1080i/720p/576p/576i/480p/480i outputs H.264 BP/MP/HP@Level 4.2; MVC HD and SD output for the same source MPEG-1 Color gamut compliant with the xvYCC (IEC 61966-2-4) MPEG-2 SP@ML and MP@HL standard MPEG-4 SP@Levels 0–3, ASP@Levels 0–5, GMC, and HDMI 1.4b with HDCP1.4 MPEG-4 short header format (H.263 baseline) Analog video interfaces AVS baseline@Level 6.0 and AVS+ − One CVBS interface VC-1 SP@ML, MP@HL, and AP@Levels 0–3 − One built-in VDAC VP6/VP8 − VBI 1-channel 1080p@60 fps decoding Audio interface − Audio-left and audio-right channels Image Decoding − S/PDIF -

Computational Complexity Optimization on H.264 Scalable/Multiview Video Coding
Computational Complexity Optimization on H.264 Scalable/Multiview Video Coding By Guangyao Zhang A thesis submitted in partial fulfilment for the requirements for the degree of PhD, at the University of Central Lancashire April 2014 Student Declaration Concurrent registration for two or more academic awards I declare that while registered as a candidate for the research degree, I have not been a registered candidate or enrolled student for another award of the University or other academic or professional institution. Material submitted for another award I declare that no material contained in the thesis has been used in any other submission for an academic award and is solely my own work. Collaboration This work presented in this thesis was carried out at the ADSIP (Applied Digital Signal and Image Processing) Research Centre, University of Central Lancashire. The work described in the thesis is entirely the candidate’s own work. Signature of Candidate ________________________________________ Type of Award Doctor of Philosophy School School of Computing, Engineering and Physical Sciences Abstract Abstract The H.264/MPEG-4 Advanced Video Coding (AVC) standard is a high efficiency and flexible video coding standard compared to previous standards. The high efficiency is achieved by utilizing a comprehensive full search motion estimation method. Although the H.264 standard improves the visual quality at low bitrates, it enormously increases the computational complexity. The research described in this thesis focuses on optimization of the computational complexity on H.264 scalable and multiview video coding. Nowadays, video application areas range from multimedia messaging and mobile to high definition television, and they use different type of transmission systems. -
Exploration of the 3D World on the Internet Using Commodity Virtual Reality Devices
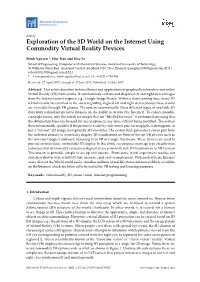
Multimodal Technologies and Interaction Article Exploration of the 3D World on the Internet Using Commodity Virtual Reality Devices Minh Nguyen *, Huy Tran and Huy Le School of Engineering, Computer & Mathematical Sciences, Auckland University of Technology, 55 Wellesley Street East, Auckland Central, Auckland 1010, New Zealand; [email protected] (H.T.); [email protected] (H.L.) * Correspondence: [email protected]; Tel.: +64-211-754-956 Received: 27 April 2017; Accepted: 17 July 2017; Published: 21 July 2017 Abstract: This article describes technical basics and applications of graphically interactive and online Virtual Reality (VR) frameworks. It automatically extracts and displays left and right stereo images from the Internet search engines, e.g., Google Image Search. Within a short waiting time, many 3D related results are returned to the users regarding aligned left and right stereo photos; these results are viewable through VR glasses. The system automatically filters different types of available 3D data from redundant pictorial datasets on the public networks (the Internet). To reduce possible copyright issues, only the search for images that are “labelled for reuse” is performed; meaning that the obtained pictures can be used for any purpose, in any area, without being modified. The system then automatically specifies if the picture is a side-by-side stereo pair, an anaglyph, a stereogram, or just a “normal” 2D image (not optically 3D viewable). The system then generates a stereo pair from the collected dataset, to seamlessly display 3D visualisation on State-of-the-art VR devices such as the low-cost Google Cardboard, Samsung Gear VR or Google Daydream. -

3D Television - Wikipedia
3D television - Wikipedia https://en.wikipedia.org/wiki/3D_television From Wikipedia, the free encyclopedia 3D television (3DTV) is television that conveys depth perception to the viewer by employing techniques such as stereoscopic display, multi-view display, 2D-plus-depth, or any other form of 3D display. Most modern 3D television sets use an active shutter 3D system or a polarized 3D system, and some are autostereoscopic without the need of glasses. According to DisplaySearch, 3D televisions shipments totaled 41.45 million units in 2012, compared with 24.14 in 2011 and 2.26 in 2010.[1] As of late 2013, the number of 3D TV viewers An example of three-dimensional television. started to decline.[2][3][4][5][6] 1 History 2 Technologies 2.1 Displaying technologies 2.2 Producing technologies 2.3 3D production 3TV sets 3.1 3D-ready TV sets 3.2 Full 3D TV sets 4 Standardization efforts 4.1 DVB 3D-TV standard 5 Broadcasts 5.1 3D Channels 5.2 List of 3D Channels 5.3 3D episodes and shows 5.3.1 1980s 5.3.2 1990s 5.3.3 2000s 5.3.4 2010s 6 World record 7 Health effects 8See also 9 References 10 Further reading The stereoscope was first invented by Sir Charles Wheatstone in 1838.[7][8] It showed that when two pictures 1 z 17 21. 11. 2016 22:13 3D television - Wikipedia https://en.wikipedia.org/wiki/3D_television are viewed stereoscopically, they are combined by the brain to produce 3D depth perception. The stereoscope was improved by Louis Jules Duboscq, and a famous picture of Queen Victoria was displayed at The Great Exhibition in 1851. -

Analysis of the Encoding Efficiency of 3D HEVC
3rd International Conference on Multimedia Technology(ICMT 2013) Analysis of the Encoding Efficiency of 3D HEVC Tian Tian 1, Xiuhua Jiang2 and Caihong Wang3 Abstract This paper mainly studies currently developing 3D video coding based on HEVC. HEVC-based 3D video coding mainly focuses on 3DTV and auto- stereoscopic video compression system. A variety of new encoding tools, such as inter-view motion prediction and depth modeling modes, have been added in 3D HEVC. The interest is created to confirm if these new features and tools improve the encoding efficiency of 3D HEVC. The goal of this article is to analyze the en- coding and compression efficiency of 3D High Efficiency Video Coding. In our experiments for stereo video without depth maps, 3D HEVC provides 59.44% and 24.32% average bit rate savings with respect to HEVC simulcast for the dependent view and both two views, while MVC provides 12.53% and 5.99% in comparison with H.264/AVC simulcast. The results indicate that 3D HEVC can remove re- dundancy between the views more effectively than MVC. Keywords: 3D video coding, 3D HEVC, MVC 1 Introduction In recent years the interest for 3D television (3DTV) and free viewpoint video (FVV) has been increased constantly. 3D movie, 3DTV and Blu-ray Disc have feasted thousands of consumers’ eyes on 3D video. While stereo displays with glasses require 2 views, auto-stereoscopic displays without glasses, which require not only 2 but a multitude of different views, are regarded as a promising technol- ogy. 1 Tian Tian () Information Engineering School, Communication University of China, Beijing, China e-mail: [email protected] 2 Xiuhua Jiang Information Engineering School, Communication University of China, Beijing, China 3 Caihong Wang Information Engineering School, Communication University of China, Beijing, China © 2013. -

Hi3796m V200 Brief Data Sheet
Hi3796M V200 Hi3796M V200 Brief Data Sheet Key Specifications High-Performance CPU AAC-LC and HE-AAC V1/V2 decoding 64-bit quad-core high-performance ARM Cortex A53 APE, FLAC, Ogg, AMR-NB, and AMR-WB decoding Integrated multimedia acceleration engine NEON G.711 (u/a) audio decoding Hardware Java acceleration G.711 (u/a), AMR-NB, AMR-WB, and AAC-LC audio Integrated hardware floating-point coprocessor encoding Integrated L1 and L2 Cache HE-AAC transcoding DD (AC3) 3D GPU Channel Decoding and TS De-multiplexing Integrated high-performance multi-core GPU Mali 450 One embedded QAM module, supporting the ITU OpenGL ES 2.0/1.1 and OpenVG 1.1 J83-A/B/C standard Memory Control Interfaces Multi TS processing simultaneously DDR3/DDR3L/DDR4 interface, supporting maximum TS interface for Full Band Capture device 32-bit data width Various descrambling algorithms of the DVB eMMC 5.0 flash interface Security Processing SPI NOR flash interface Advanced CA SPI NAND flash interface Downloadable Conditional Access System Asynchronous/Synchronous NAND flash interface TVOS security mechanism − SLC/MLC flash memory Secure boot, secure storage, and secure upgrade − Maximum 64-bit ECC DRM and hardware watermark Video Decoding (HiVXE 2.0 Processing Engine) HDCP 2.2/1.4 protection for HDMI outputs AVS2 Main-10bit Profile, Level 8.2.60, supporting Graphics and Display Processing (Imprex 2.0 maximum 4K x 2K@60 fps 10-bit decoding Processing Engine) H.265/HEVC Main/Main 10 Profile@Level 5.1 high-tier, Dolby Vision, HDR10, HLG, and SLF -

3D Vision: Technologies and Applications
3D Vision: Technologies and Applications SE Selected Topics in Multimedia 2012W Werner Robitza MNR a0700504 [email protected] ABSTRACT man visual system, depth perception and health effects. We 3D vision is a promising new branch in the entertainment then describe the technologies used to record, store and re- industry that encompasses applications for cinema, televi- produce stereographic content in Section 3. An overview of sion and video games alike. The twenty-first century uprise the current developments and an outlook to the near future of three-dimensional technology can only be explained by a of 3D is given in Section 4. We conclude with Section 5, mix of technological and social factors. Despite this, vendors summarizing the paper. are still struggling with reaching a critical mass for the estab- lishment of new products. Some users experience discomfort 2. PRINCIPLES OF 3D VISION when using stereoscopic devices due to the difference in per- The complex human visual system allows us to perceive ceived and reproduced reality. To address these problems, the surrounding world in three dimensions: To width and recording and display technologies need to be compared and height of observed objects we add the notion of\distance"(or evaluated for their applicability and usefulness. We give an \depth"). As photons travel through their optic components, overview on today's 3D technology, its benefits and draw- they create a two-dimensional representation on the retina, backs, as well as an outlook into the possible future. once for each eye. The human brain uses this planar picture from both eyes to reconstruct a three-dimensional model 1. -

Video Encoding with Open Source Tools
Video Encoding with Open Source Tools Steffen Bauer, 26/1/2010 LUG Linux User Group Frankfurt am Main Overview Basic concepts of video compression Video formats and codecs How to do it with Open Source and Linux 1. Basic concepts of video compression Characteristics of video streams Framerate Number of still pictures per unit of time of video; up to 120 frames/s for professional equipment. PAL video specifies 25 frames/s. Interlacing / Progressive Video Interlaced: Lines of one frame are drawn alternatively in two half-frames Progressive: All lines of one frame are drawn in sequence Resolution Size of a video image (measured in pixels for digital video) 768/720×576 for PAL resolution Up to 1920×1080p for HDTV resolution Aspect Ratio Dimensions of the video screen; ratio between width and height. Pixels used in digital video can have non-square aspect ratios! Usual ratios are 4:3 (traditional TV) and 16:9 (anamorphic widescreen) Why video encoding? Example: 52 seconds of DVD PAL movie (16:9, 720x576p, 25 fps, progressive scan) Compression Video codec Raw Size factor Comment 1300 single frames, MotionTarga, Raw frames 1.1 GB - uncompressed HUFFYUV 459 MB 2.2 / 55% Lossless compression MJPEG 60 MB 20 / 95% Motion JPEG; lossy; intraframe only lavc MPEG-2 24 MB 50 / 98% Standard DVD quality X.264 MPEG-4 5.3 MB 200 / 99.5% High efficient video codec AVC Basic principles of multimedia encoding Video compression Lossy compression Lossless (irreversible; (reversible; using shortcomings statistical encoding) in human perception) Intraframe encoding -
Introduction
CMPT 820 Multimedia Systems Introduction Ze-Nian Li Spring 2019 1 CMPT820 Multimedia Systems Why this course? Multimedia is cool Media -> Multimedia Everywhere Requires broad knowledge in mathematics, signal processing, communications, networking, software, hardware, … Job opportunities Multimedia is a booming industry • in the metro Vancouver area Tons of opportunities created by next-generation standards and emerging applications: • JPEG/JPEG 2000 • MPEG-1/2/4 H.264/265/HEVC 4K/8K TV 3D/freeview • 3G/4G/5G mobile communications • Multimedia-enabled smartphone, tablets • Social media, Cloud media, Crowd media • Online gaming 2 CMPT820 Multimedia Systems Multimedia is Multidisciplinary Computer hardware, network, operating system, database Image, audio, Multimedia Computer vision, speech computing pattern recognition, processing Machine learning Human computer Computer interaction graphics 3 CMPT820 Multimedia Systems Books and References Recommended Textbook Fundamentals of Multimedia, 2nd Edition, by Z.N. Li, M.S. Drew, and J. Liu, Springer, 2014. Reference books Video Processing and Communications, Y. Wang, J. Ostermann, Y-Q Zhang, Prentice Hall, 2002. Resource Home page • www.cs.sfu.ca/CC/820/li/ Please check it regularly 4 CMPT820 Multimedia Systems Grading Scheme Two programming assignments 2x10% Presentation and class participation 40% Term project 40% It is a Graduate seminar course ! 5 CMPT820 Multimedia Systems Topics Introduction to Image and Video Compression Wavelets and JPEG-2000 H.264/MPEG-4 AVC, H.265, and MPEG-7 Image and Video Quality Assessment Content Based Image and Video Retrieval Visual Content Analysis Digital Audio Compression 6 CMPT820 Multimedia Systems Questions? 7 CMPT820 Multimedia Systems What is Multimedia? Multimedia means that information can be represented through audio, images, graphics and animation, video, in addition to traditional media (i.e., text and graphics drawings). -

Efficient Motion Estimation and Mode Decision Algorithms for Advanced Video Coding
University of Windsor Scholarship at UWindsor Electronic Theses and Dissertations Theses, Dissertations, and Major Papers 2011 Efficient Motion Estimation and Mode Decision Algorithms for Advanced Video Coding Mohammed Golam Sarwer University of Windsor Follow this and additional works at: https://scholar.uwindsor.ca/etd Recommended Citation Sarwer, Mohammed Golam, "Efficient Motion Estimation and Mode Decision Algorithms for Advanced Video Coding" (2011). Electronic Theses and Dissertations. 439. https://scholar.uwindsor.ca/etd/439 This online database contains the full-text of PhD dissertations and Masters’ theses of University of Windsor students from 1954 forward. These documents are made available for personal study and research purposes only, in accordance with the Canadian Copyright Act and the Creative Commons license—CC BY-NC-ND (Attribution, Non-Commercial, No Derivative Works). Under this license, works must always be attributed to the copyright holder (original author), cannot be used for any commercial purposes, and may not be altered. Any other use would require the permission of the copyright holder. Students may inquire about withdrawing their dissertation and/or thesis from this database. For additional inquiries, please contact the repository administrator via email ([email protected]) or by telephone at 519-253-3000ext. 3208. Efficient Motion Estimation and Mode Decision Algorithms for Advanced Video Coding by Mohammed Golam Sarwer A Dissertation Submitted to the Faculty of Graduate Studies through the Department of Electrical and Computer Engineering in Partial Fulfillment of the Requirements for the Degree of Doctor of Philosophy at the University of Windsor Windsor, Ontario, Canada 2011 © 2011, Mohammed Golam Sarwer All Rights Reserved. No part of this document may be reproduced, stored or otherwise retained in a retrieval system or transmitted in any form, on any medium by any means without prior written permission of the author.