2. Waves and the Wave Equation
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Glossary Physics (I-Introduction)
1 Glossary Physics (I-introduction) - Efficiency: The percent of the work put into a machine that is converted into useful work output; = work done / energy used [-]. = eta In machines: The work output of any machine cannot exceed the work input (<=100%); in an ideal machine, where no energy is transformed into heat: work(input) = work(output), =100%. Energy: The property of a system that enables it to do work. Conservation o. E.: Energy cannot be created or destroyed; it may be transformed from one form into another, but the total amount of energy never changes. Equilibrium: The state of an object when not acted upon by a net force or net torque; an object in equilibrium may be at rest or moving at uniform velocity - not accelerating. Mechanical E.: The state of an object or system of objects for which any impressed forces cancels to zero and no acceleration occurs. Dynamic E.: Object is moving without experiencing acceleration. Static E.: Object is at rest.F Force: The influence that can cause an object to be accelerated or retarded; is always in the direction of the net force, hence a vector quantity; the four elementary forces are: Electromagnetic F.: Is an attraction or repulsion G, gravit. const.6.672E-11[Nm2/kg2] between electric charges: d, distance [m] 2 2 2 2 F = 1/(40) (q1q2/d ) [(CC/m )(Nm /C )] = [N] m,M, mass [kg] Gravitational F.: Is a mutual attraction between all masses: q, charge [As] [C] 2 2 2 2 F = GmM/d [Nm /kg kg 1/m ] = [N] 0, dielectric constant Strong F.: (nuclear force) Acts within the nuclei of atoms: 8.854E-12 [C2/Nm2] [F/m] 2 2 2 2 2 F = 1/(40) (e /d ) [(CC/m )(Nm /C )] = [N] , 3.14 [-] Weak F.: Manifests itself in special reactions among elementary e, 1.60210 E-19 [As] [C] particles, such as the reaction that occur in radioactive decay. -

Relativistic Dynamics
Chapter 4 Relativistic dynamics We have seen in the previous lectures that our relativity postulates suggest that the most efficient (lazy but smart) approach to relativistic physics is in terms of 4-vectors, and that velocities never exceed c in magnitude. In this chapter we will see how this 4-vector approach works for dynamics, i.e., for the interplay between motion and forces. A particle subject to forces will undergo non-inertial motion. According to Newton, there is a simple (3-vector) relation between force and acceleration, f~ = m~a; (4.0.1) where acceleration is the second time derivative of position, d~v d2~x ~a = = : (4.0.2) dt dt2 There is just one problem with these relations | they are wrong! Newtonian dynamics is a good approximation when velocities are very small compared to c, but outside of this regime the relation (4.0.1) is simply incorrect. In particular, these relations are inconsistent with our relativity postu- lates. To see this, it is sufficient to note that Newton's equations (4.0.1) and (4.0.2) predict that a particle subject to a constant force (and initially at rest) will acquire a velocity which can become arbitrarily large, Z t ~ d~v 0 f ~v(t) = 0 dt = t ! 1 as t ! 1 . (4.0.3) 0 dt m This flatly contradicts the prediction of special relativity (and causality) that no signal can propagate faster than c. Our task is to understand how to formulate the dynamics of non-inertial particles in a manner which is consistent with our relativity postulates (and then verify that it matches observation, including in the non-relativistic regime). -

Type-I Hyperbolic Metasurfaces for Highly-Squeezed Designer
Type-I hyperbolic metasurfaces for highly-squeezed designer polaritons with negative group velocity Yihao Yang1,2,3,4, Pengfei Qin2, Xiao Lin3, Erping Li2, Zuojia Wang5,*, Baile Zhang3,4,*, and Hongsheng Chen1,2,* 1State Key Laboratory of Modern Optical Instrumentation, College of Information Science and Electronic Engineering, Zhejiang University, Hangzhou 310027, China. 2Key Lab. of Advanced Micro/Nano Electronic Devices & Smart Systems of Zhejiang, The Electromagnetics Academy at Zhejiang University, Zhejiang University, Hangzhou 310027, China. 3Division of Physics and Applied Physics, School of Physical and Mathematical Sciences, Nanyang Technological University, 21 Nanyang Link, Singapore 637371, Singapore. 4Centre for Disruptive Photonic Technologies, The Photonics Institute, Nanyang Technological University, 50 Nanyang Avenue, Singapore 639798, Singapore. 5School of Information Science and Engineering, Shandong University, Qingdao 266237, China *[email protected] (Z.W.); [email protected] (B.Z.); [email protected] (H.C.) Abstract Hyperbolic polaritons in van der Waals materials and metamaterial heterostructures provide unprecedenced control over light-matter interaction at the extreme nanoscale. Here, we propose a concept of type-I hyperbolic metasurface supporting highly-squeezed magnetic designer polaritons, which act as magnetic analogues to hyperbolic polaritons in the hexagonal boron nitride (h-BN) in the first Reststrahlen band. Comparing with the natural h-BN, the size and spacing of the metasurface unit cell can be readily scaled up (or down), allowing for manipulating designer polaritons in frequency and in space at will. Experimental measurements display the cone-like hyperbolic dispersion in the momentum space, associating with an effective refractive index up to 60 and a group velocity down to 1/400 of the light speed in vacuum. -

Appendix D: the Wave Vector
General Appendix D-1 2/13/2016 Appendix D: The Wave Vector In this appendix we briefly address the concept of the wave vector and its relationship to traveling waves in 2- and 3-dimensional space, but first let us start with a review of 1- dimensional traveling waves. 1-dimensional traveling wave review A real-valued, scalar, uniform, harmonic wave with angular frequency and wavelength λ traveling through a lossless, 1-dimensional medium may be represented by the real part of 1 ω the complex function ψ (xt , ): ψψ(x , t )= (0,0) exp(ikx− i ω t ) (D-1) where the complex phasor ψ (0,0) determines the wave’s overall amplitude as well as its phase φ0 at the origin (xt , )= (0,0). The harmonic function’s wave number k is determined by the wavelength λ: k = ± 2πλ (D-2) The sign of k determines the wave’s direction of propagation: k > 0 for a wave traveling to the right (increasing x). The wave’s instantaneous phase φ(,)xt at any position and time is φφ(,)x t=+−0 ( kx ω t ) (D-3) The wave number k is thus the spatial analog of angular frequency : with units of radians/distance, it equals the rate of change of the wave’s phase with position (with time t ω held constant), i.e. ∂∂φφ k =; ω = − (D-4) ∂∂xt (note the minus sign in the differential expression for ). If a point, originally at (x= xt0 , = 0), moves with the wave at velocity vkφ = ω , then the wave’s phase at that point ω will remain constant: φ(x0+ vtφφ ,) t =++ φ0 kx ( 0 vt ) −=+ ωφ t00 kx The velocity vφ is called the wave’s phase velocity. -

EMT UNIT 1 (Laws of Reflection and Refraction, Total Internal Reflection).Pdf
Electromagnetic Theory II (EMT II); Online Unit 1. REFLECTION AND TRANSMISSION AT OBLIQUE INCIDENCE (Laws of Reflection and Refraction and Total Internal Reflection) (Introduction to Electrodynamics Chap 9) Instructor: Shah Haidar Khan University of Peshawar. Suppose an incident wave makes an angle θI with the normal to the xy-plane at z=0 (in medium 1) as shown in Figure 1. Suppose the wave splits into parts partially reflecting back in medium 1 and partially transmitting into medium 2 making angles θR and θT, respectively, with the normal. Figure 1. To understand the phenomenon at the boundary at z=0, we should apply the appropriate boundary conditions as discussed in the earlier lectures. Let us first write the equations of the waves in terms of electric and magnetic fields depending upon the wave vector κ and the frequency ω. MEDIUM 1: Where EI and BI is the instantaneous magnitudes of the electric and magnetic vector, respectively, of the incident wave. Other symbols have their usual meanings. For the reflected wave, Similarly, MEDIUM 2: Where ET and BT are the electric and magnetic instantaneous vectors of the transmitted part in medium 2. BOUNDARY CONDITIONS (at z=0) As the free charge on the surface is zero, the perpendicular component of the displacement vector is continuous across the surface. (DIꓕ + DRꓕ ) (In Medium 1) = DTꓕ (In Medium 2) Where Ds represent the perpendicular components of the displacement vector in both the media. Converting D to E, we get, ε1 EIꓕ + ε1 ERꓕ = ε2 ETꓕ ε1 ꓕ +ε1 ꓕ= ε2 ꓕ Since the equation is valid for all x and y at z=0, and the coefficients of the exponentials are constants, only the exponentials will determine any change that is occurring. -
Oscillating Currents
Oscillating Currents • Ch.30: Induced E Fields: Faraday’s Law • Ch.30: RL Circuits • Ch.31: Oscillations and AC Circuits Review: Inductance • If the current through a coil of wire changes, there is an induced emf proportional to the rate of change of the current. •Define the proportionality constant to be the inductance L : di εεε === −−−L dt • SI unit of inductance is the henry (H). LC Circuit Oscillations Suppose we try to discharge a capacitor, using an inductor instead of a resistor: At time t=0 the capacitor has maximum charge and the current is zero. Later, current is increasing and capacitor’s charge is decreasing Oscillations (cont’d) What happens when q=0? Does I=0 also? No, because inductor does not allow sudden changes. In fact, q = 0 means i = maximum! So now, charge starts to build up on C again, but in the opposite direction! Textbook Figure 31-1 Energy is moving back and forth between C,L 1 2 1 2 UL === UB === 2 Li UC === UE === 2 q / C Textbook Figure 31-1 Mechanical Analogy • Looks like SHM (Ch. 15) Mass on spring. • Variable q is like x, distortion of spring. • Then i=dq/dt , like v=dx/dt , velocity of mass. By analogy with SHM, we can guess that q === Q cos(ωωω t) dq i === === −−−ωωωQ sin(ωωω t) dt Look at Guessed Solution dq q === Q cos(ωωω t) i === === −−−ωωωQ sin(ωωω t) dt q i Mathematical description of oscillations Note essential terminology: amplitude, phase, frequency, period, angular frequency. You MUST know what these words mean! If necessary review Chapters 10, 15. -

Frequency Response = K − Ml
Frequency Response 1. Introduction We will examine the response of a second order linear constant coefficient system to a sinusoidal input. We will pay special attention to the way the output changes as the frequency of the input changes. This is what we mean by the frequency response of the system. In particular, we will look at the amplitude response and the phase response; that is, the amplitude and phase lag of the system’s output considered as functions of the input frequency. In O.4 the Exponential Input Theorem was used to find a particular solution in the case of exponential or sinusoidal input. Here we will work out in detail the formulas for a second order system. We will then interpret these formulas as the frequency response of a mechanical system. In particular, we will look at damped-spring-mass systems. We will study carefully two cases: first, when the mass is driven by pushing on the spring and second, when the mass is driven by pushing on the dashpot. Both these systems have the same form p(D)x = q(t), but their amplitude responses are very different. This is because, as we will see, it can make physical sense to designate something other than q(t) as the input. For example, in the system mx0 + bx0 + kx = by0 we will consider y to be the input. (Of course, y is related to the expression on the right- hand-side of the equation, but it is not exactly the same.) 2. Sinusoidally Driven Systems: Second Order Constant Coefficient DE’s We start with the second order linear constant coefficient (CC) DE, which as we’ve seen can be interpreted as modeling a damped forced harmonic oscillator. -

Multidisciplinary Design Project Engineering Dictionary Version 0.0.2
Multidisciplinary Design Project Engineering Dictionary Version 0.0.2 February 15, 2006 . DRAFT Cambridge-MIT Institute Multidisciplinary Design Project This Dictionary/Glossary of Engineering terms has been compiled to compliment the work developed as part of the Multi-disciplinary Design Project (MDP), which is a programme to develop teaching material and kits to aid the running of mechtronics projects in Universities and Schools. The project is being carried out with support from the Cambridge-MIT Institute undergraduate teaching programe. For more information about the project please visit the MDP website at http://www-mdp.eng.cam.ac.uk or contact Dr. Peter Long Prof. Alex Slocum Cambridge University Engineering Department Massachusetts Institute of Technology Trumpington Street, 77 Massachusetts Ave. Cambridge. Cambridge MA 02139-4307 CB2 1PZ. USA e-mail: [email protected] e-mail: [email protected] tel: +44 (0) 1223 332779 tel: +1 617 253 0012 For information about the CMI initiative please see Cambridge-MIT Institute website :- http://www.cambridge-mit.org CMI CMI, University of Cambridge Massachusetts Institute of Technology 10 Miller’s Yard, 77 Massachusetts Ave. Mill Lane, Cambridge MA 02139-4307 Cambridge. CB2 1RQ. USA tel: +44 (0) 1223 327207 tel. +1 617 253 7732 fax: +44 (0) 1223 765891 fax. +1 617 258 8539 . DRAFT 2 CMI-MDP Programme 1 Introduction This dictionary/glossary has not been developed as a definative work but as a useful reference book for engi- neering students to search when looking for the meaning of a word/phrase. It has been compiled from a number of existing glossaries together with a number of local additions. -

Music Synthesis
MUSIC SYNTHESIS Sound synthesis is the art of using electronic devices to create & modify signals that are then turned into sound waves by a speaker. Making Waves: WGRL - 2015 Oscillators An oscillator generates a consistent, repeating signal. Signals from oscillators and other sources are used to control the movement of the cones in our speakers, which make real sound waves which travel to our ears. An oscillator wiggles an audio signal. DEMONSTRATE: If you tie one end of a rope to a doorknob, stand back a few feet, and wiggle the other end of the rope up and down really fast, you're doing roughly the same thing as an oscillator. REVIEW: Frequency and pitch Frequency, measured in cycles/second AKA Hertz, is the rate at which a sound wave moves in and out. The length of a signal cycle of a waveform is the span of time it takes for that waveform to repeat. People generally hear an increase in the frequency of a sound wave as an increase in pitch. F DEMONSTRATE: an oscillator generating a signal that repeats at the rate of 440 cycles per second will have the same pitch as middle A on a piano. An oscillator generating a signal that repeats at 880 cycles per second will have the same pitch as the A an octave above middle A. Types of Waveforms: SINE The SINE wave is the most basic, pure waveform. These simple waves have only one frequency. Any other waveform can be created by adding up a series of sine waves. In this picture, the first two sine waves In this picture, a sine wave is added to its are added together to produce a third. -

Linear Elastodynamics and Waves
Linear Elastodynamics and Waves M. Destradea, G. Saccomandib aSchool of Electrical, Electronic, and Mechanical Engineering, University College Dublin, Belfield, Dublin 4, Ireland; bDipartimento di Ingegneria Industriale, Universit`adegli Studi di Perugia, 06125 Perugia, Italy. Contents 1 Introduction 3 2 Bulk waves 6 2.1 Homogeneous waves in isotropic solids . 8 2.2 Homogeneous waves in anisotropic solids . 10 2.3 Slowness surface and wavefronts . 12 2.4 Inhomogeneous waves in isotropic solids . 13 3 Surface waves 15 3.1 Shear horizontal homogeneous surface waves . 15 3.2 Rayleigh waves . 17 3.3 Love waves . 22 3.4 Other surface waves . 25 3.5 Surface waves in anisotropic media . 25 4 Interface waves 27 4.1 Stoneley waves . 27 4.2 Slip waves . 29 4.3 Scholte waves . 32 4.4 Interface waves in anisotropic solids . 32 5 Concluding remarks 33 1 Abstract We provide a simple introduction to wave propagation in the frame- work of linear elastodynamics. We discuss bulk waves in isotropic and anisotropic linear elastic materials and we survey several families of surface and interface waves. We conclude by suggesting a list of books for a more detailed study of the topic. Keywords: linear elastodynamics, anisotropy, plane homogeneous waves, bulk waves, interface waves, surface waves. 1 Introduction In elastostatics we study the equilibria of elastic solids; when its equilib- rium is disturbed, a solid is set into motion, which constitutes the subject of elastodynamics. Early efforts in the study of elastodynamics were mainly aimed at modeling seismic wave propagation. With the advent of electron- ics, many applications have been found in the industrial world. -

Phase and Group Velocity
Assignment 4 PHSGCOR04T Sound Model Questions & Answers Phase and Group velocity Department of Physics, Hiralal Mazumdar Memorial College For Women, Dakshineswar Course Prepared by Parthapratim Pradhan 60 Lectures ≡ 4 Credits April 14, 2020 1. Define phase velocity and group velocity. We know that a traveling wave or a progressive wave propagated through a medium in a +ve x direction with a velocity v, amplitude a and wavelength λ is described by 2π y = a sin (vt − x) (1) λ If n be the frequency of the wave, then wave velocity v = nλ in this situation the traveling wave can be written as 2π x y = a sin (nλt − x)= a sin 2π(nt − ) (2) λ λ This can be rewritten as 2π y = a sin (2πnt − x) (3) λ = a sin (ωt − kx) (4) 2π 2π where ω = T = 2πn is called angular frequency of the wave and k = λ is called propagation constant or wave vector. This is simply a traveling wave equation. The Eq. (4) implies that the phase (ωt − kx) of the wave is constant. Thus ωt − kx = constant Differentiating with respect to t, we find dx dx ω ω − k = 0 ⇒ = dt dt k This velocity is called as phase velocity (vp). Thus it is defined as the ratio between the frequency and the wavelength of a monochromatic wave. dx ω 2πn λ vp = = = 2π = nλ = = v dt k λ T This means that for a monochromatic wave Phase velocity=Wave velocity 1 Where as the group velocity is defined as the ratio between the change in frequency and change in wavelength of a wavegroup or wave packet dω ∆ω ω1 − ω2 vg = = = dk ∆k k1 − k2 of two traveling wave described by the equations y1 = a sin (ω1 t − k1 x)and y2 = a sin (ω2 t − k2 x). -
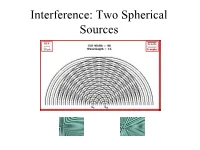
Interference: Two Spherical Sources Superposition
Interference: Two Spherical Sources Superposition Interference Waves ADD: Constructive Interference. Waves SUBTRACT: Destructive Interference. In Phase Out of Phase Superposition Traveling waves move through each other, interfere, and keep on moving! Pulsed Interference Superposition Waves ADD in space. Any complex wave can be built from simple sine waves. Simply add them point by point. Simple Sine Wave Simple Sine Wave Complex Wave Fourier Synthesis of a Square Wave Any periodic function can be represented as a series of sine and cosine terms in a Fourier series: y() t ( An sin2ƒ n t B n cos2ƒ) n t n Superposition of Sinusoidal Waves • Case 1: Identical, same direction, with phase difference (Interference) Both 1-D and 2-D waves. • Case 2: Identical, opposite direction (standing waves) • Case 3: Slightly different frequencies (Beats) Superposition of Sinusoidal Waves • Assume two waves are traveling in the same direction, with the same frequency, wavelength and amplitude • The waves differ in phase • y1 = A sin (kx - wt) • y2 = A sin (kx - wt + f) • y = y1+y2 = 2A cos (f/2) sin (kx - wt + f/2) Resultant Amplitude Depends on phase: Spatial Interference Term Sinusoidal Waves with Constructive Interference y = y1+y2 = 2A cos (f/2) sin (kx - wt + f /2) • When f = 0, then cos (f/2) = 1 • The amplitude of the resultant wave is 2A – The crests of one wave coincide with the crests of the other wave • The waves are everywhere in phase • The waves interfere constructively Sinusoidal Waves with Destructive Interference y = y1+y2 = 2A cos (f/2)