Crevassing and Calving of Glacial Ice James Patrick Kenneally
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
100 Magic Water Words
WaterCards.(WebFinal).qxp 6/15/06 8:10 AM Page 1 estuary ocean backwater canal ice flood torrent snowflake iceberg wastewater 10 0 ripple tributary pond aquifer icicle waterfall foam creek igloo cove Water inlet fish ladder snowpack reservoir sleet Words slough shower gulf rivulet salt lake groundwater sea puddle swamp blizzard mist eddy spillway wetland harbor steam Narcissus surf dew white water headwaters tide whirlpool rapids brook 100 Water Words abyssal runoff snow swell vapor EFFECT: Lay 10 cards out blue side up. Ask a participant to mentally select a word and turn the card with the word on it over. You turn all marsh aqueduct river channel saltwater the other cards over and mix them up. Ask the participant to point to the card with his/her water table spray cloud sound haze word on it. You magically tell the word selected. KEY: The second word from the top on the riptide lake glacier fountain spring white side is a code word for a number from one to ten. Here is the code key: Ocean = one (ocean/one) watershed bay stream lock pool Torrent = two (torrent/two) Tributary = three (tributary/three) Foam = four (foam/four) precipitation lagoon wave crest bayou Fish ladder = five (fish ladder/five) Shower = six (shower/six) current trough hail well sluice Sea = seven (sea/seven) Eddy = eight (eddy/eight) Narcissus = nine (Narcissus/nine) salt marsh bog rain breaker deluge Tide = ten (tide/ten) Notice the code word on the card that is first frost downpour fog strait snowstorm turned over. When the second card is selected the chosen word will be the secret number inundation cloudburst effluent wake rainbow from the top. -
Lecture 21: Glaciers and Paleoclimate Read: Chapter 15 Homework Due Thursday Nov
Learning Objectives (LO) Lecture 21: Glaciers and Paleoclimate Read: Chapter 15 Homework due Thursday Nov. 12 What we’ll learn today:! 1. 1. Glaciers and where they occur! 2. 2. Compare depositional and erosional features of glaciers! 3. 3. Earth-Sun orbital parameters, relevance to interglacial periods ! A glacier is a river of ice. Glaciers can range in size from: 100s of m (mountain glaciers) to 100s of km (continental ice sheets) Most glaciers are 1000s to 100,000s of years old! The Snowline is the lowest elevation of a perennial (2 yrs) snow field. Glaciers can only form above the snowline, where snow does not completely melt in the summer. Requirements: Cold temperatures Polar latitudes or high elevations Sufficient snow Flat area for snow to accumulate Permafrost is permanently frozen soil beneath a seasonal active layer that supports plant life Glaciers are made of compressed, recrystallized snow. Snow buildup in the zone of accumulation flows downhill into the zone of wastage. Glacier-Covered Areas Glacier Coverage (km2) No glaciers in Australia! 160,000 glaciers total 47 countries have glaciers 94% of Earth’s ice is in Greenland and Antarctica Mountain Glaciers are Retreating Worldwide The Antarctic Ice Sheet The Greenland Ice Sheet Glaciers flow downhill through ductile (plastic) deformation & by basal sliding. Brittle deformation near the surface makes cracks, or crevasses. Antarctic ice sheet: ductile flow extends into the ocean to form an ice shelf. Wilkins Ice shelf Breakup http://www.youtube.com/watch?v=XUltAHerfpk The Greenland Ice Sheet has fewer and smaller ice shelves. Erosional Features Unique erosional landforms remain after glaciers melt. -

Minimal Geological Methane Emissions During the Younger Dryas-Preboreal Abrupt Warming Event
UC San Diego UC San Diego Previously Published Works Title Minimal geological methane emissions during the Younger Dryas-Preboreal abrupt warming event. Permalink https://escholarship.org/uc/item/1j0249ms Journal Nature, 548(7668) ISSN 0028-0836 Authors Petrenko, Vasilii V Smith, Andrew M Schaefer, Hinrich et al. Publication Date 2017-08-01 DOI 10.1038/nature23316 Peer reviewed eScholarship.org Powered by the California Digital Library University of California LETTER doi:10.1038/nature23316 Minimal geological methane emissions during the Younger Dryas–Preboreal abrupt warming event Vasilii V. Petrenko1, Andrew M. Smith2, Hinrich Schaefer3, Katja Riedel3, Edward Brook4, Daniel Baggenstos5,6, Christina Harth5, Quan Hua2, Christo Buizert4, Adrian Schilt4, Xavier Fain7, Logan Mitchell4,8, Thomas Bauska4,9, Anais Orsi5,10, Ray F. Weiss5 & Jeffrey P. Severinghaus5 Methane (CH4) is a powerful greenhouse gas and plays a key part atmosphere can only produce combined estimates of natural geological in global atmospheric chemistry. Natural geological emissions and anthropogenic fossil CH4 emissions (refs 2, 12). (fossil methane vented naturally from marine and terrestrial Polar ice contains samples of the preindustrial atmosphere and seeps and mud volcanoes) are thought to contribute around offers the opportunity to quantify geological CH4 in the absence of 52 teragrams of methane per year to the global methane source, anthropogenic fossil CH4. A recent study used a combination of revised 13 13 about 10 per cent of the total, but both bottom-up methods source δ C isotopic signatures and published ice core δ CH4 data to 1 −1 2 (measuring emissions) and top-down approaches (measuring estimate natural geological CH4 at 51 ± 20 Tg CH4 yr (1σ range) , atmospheric mole fractions and isotopes)2 for constraining these in agreement with the bottom-up assessment of ref. -
Sea Level and Climate Introduction
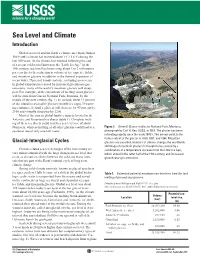
Sea Level and Climate Introduction Global sea level and the Earth’s climate are closely linked. The Earth’s climate has warmed about 1°C (1.8°F) during the last 100 years. As the climate has warmed following the end of a recent cold period known as the “Little Ice Age” in the 19th century, sea level has been rising about 1 to 2 millimeters per year due to the reduction in volume of ice caps, ice fields, and mountain glaciers in addition to the thermal expansion of ocean water. If present trends continue, including an increase in global temperatures caused by increased greenhouse-gas emissions, many of the world’s mountain glaciers will disap- pear. For example, at the current rate of melting, most glaciers will be gone from Glacier National Park, Montana, by the middle of the next century (fig. 1). In Iceland, about 11 percent of the island is covered by glaciers (mostly ice caps). If warm- ing continues, Iceland’s glaciers will decrease by 40 percent by 2100 and virtually disappear by 2200. Most of the current global land ice mass is located in the Antarctic and Greenland ice sheets (table 1). Complete melt- ing of these ice sheets could lead to a sea-level rise of about 80 meters, whereas melting of all other glaciers could lead to a Figure 1. Grinnell Glacier in Glacier National Park, Montana; sea-level rise of only one-half meter. photograph by Carl H. Key, USGS, in 1981. The glacier has been retreating rapidly since the early 1900’s. -

Calving Processes and the Dynamics of Calving Glaciers ⁎ Douglas I
Earth-Science Reviews 82 (2007) 143–179 www.elsevier.com/locate/earscirev Calving processes and the dynamics of calving glaciers ⁎ Douglas I. Benn a,b, , Charles R. Warren a, Ruth H. Mottram a a School of Geography and Geosciences, University of St Andrews, KY16 9AL, UK b The University Centre in Svalbard, PO Box 156, N-9171 Longyearbyen, Norway Received 26 October 2006; accepted 13 February 2007 Available online 27 February 2007 Abstract Calving of icebergs is an important component of mass loss from the polar ice sheets and glaciers in many parts of the world. Calving rates can increase dramatically in response to increases in velocity and/or retreat of the glacier margin, with important implications for sea level change. Despite their importance, calving and related dynamic processes are poorly represented in the current generation of ice sheet models. This is largely because understanding the ‘calving problem’ involves several other long-standing problems in glaciology, combined with the difficulties and dangers of field data collection. In this paper, we systematically review different aspects of the calving problem, and outline a new framework for representing calving processes in ice sheet models. We define a hierarchy of calving processes, to distinguish those that exert a fundamental control on the position of the ice margin from more localised processes responsible for individual calving events. The first-order control on calving is the strain rate arising from spatial variations in velocity (particularly sliding speed), which determines the location and depth of surface crevasses. Superimposed on this first-order process are second-order processes that can further erode the ice margin. -

Ice Flow Impacts the Firn Structure of Greenland's Percolation Zone
University of Montana ScholarWorks at University of Montana Graduate Student Theses, Dissertations, & Professional Papers Graduate School 2019 Ice Flow Impacts the Firn Structure of Greenland's Percolation Zone Rosemary C. Leone University of Montana, Missoula Follow this and additional works at: https://scholarworks.umt.edu/etd Part of the Glaciology Commons Let us know how access to this document benefits ou.y Recommended Citation Leone, Rosemary C., "Ice Flow Impacts the Firn Structure of Greenland's Percolation Zone" (2019). Graduate Student Theses, Dissertations, & Professional Papers. 11474. https://scholarworks.umt.edu/etd/11474 This Thesis is brought to you for free and open access by the Graduate School at ScholarWorks at University of Montana. It has been accepted for inclusion in Graduate Student Theses, Dissertations, & Professional Papers by an authorized administrator of ScholarWorks at University of Montana. For more information, please contact [email protected]. ICE FLOW IMPACTS THE FIRN STRUCTURE OF GREENLAND’S PERCOLATION ZONE By ROSEMARY CLAIRE LEONE Bachelor of Science, Colorado School of Mines, Golden, CO, 2015 Thesis presented in partial fulfillMent of the requireMents for the degree of Master of Science in Geosciences The University of Montana Missoula, MT DeceMber 2019 Approved by: Scott Whittenburg, Dean of The Graduate School Graduate School Dr. Joel T. Harper, Chair DepartMent of Geosciences Dr. Toby W. Meierbachtol DepartMent of Geosciences Dr. Jesse V. Johnson DepartMent of Computer Science i Leone, RoseMary, M.S, Fall 2019 Geosciences Ice Flow Impacts the Firn Structure of Greenland’s Percolation Zone Chairperson: Dr. Joel T. Harper One diMensional siMulations of firn evolution neglect horizontal transport as the firn column Moves down slope during burial. -

Comparison of Remote Sensing Extraction Methods for Glacier Firn Line- Considering Urumqi Glacier No.1 As the Experimental Area
E3S Web of Conferences 218, 04024 (2020) https://doi.org/10.1051/e3sconf/202021804024 ISEESE 2020 Comparison of remote sensing extraction methods for glacier firn line- considering Urumqi Glacier No.1 as the experimental area YANJUN ZHAO1, JUN ZHAO1, XIAOYING YUE2and YANQIANG WANG1 1College of Geography and Environmental Science, Northwest Normal University, Lanzhou, China 2State Key Laboratory of Cryospheric Sciences, Northwest Institute of Eco-Environment and Resources/Tien Shan Glaciological Station, Chinese Academy of Sciences, Lanzhou, China Abstract. In mid-latitude glaciers, the altitude of the snowline at the end of the ablating season can be used to indicate the equilibrium line, which can be used as an approximation for it. In this paper, Urumqi Glacier No.1 was selected as the experimental area while Landsat TM/ETM+/OLI images were used to analyze and compare the accuracy as well as applicability of the visual interpretation, Normalized Difference Snow Index, single-band threshold and albedo remote sensing inversion methods for the extraction of the firn lines. The results show that the visual interpretation and the albedo remote sensing inversion methods have strong adaptability, alonger with the high accuracy of the extracted firn line while it is followed by the Normalized Difference Snow Index and the single-band threshold methods. In the year with extremely negative mass balance, the altitude deviation of the firn line extracted by different methods is increased. Except for the years with extremely negative mass balance, the altitude of the firn line at the end of the ablating season has a good indication for the altitude of the balance line. -

Glacier (And Ice Sheet) Mass Balance
Glacier (and ice sheet) Mass Balance The long-term average position of the highest (late summer) firn line ! is termed the Equilibrium Line Altitude (ELA) Firn is old snow How an ice sheet works (roughly): Accumulation zone ablation zone ice land ocean • Net accumulation creates surface slope Why is the NH insolation important for global ice• sheetSurface advance slope causes (Milankovitch ice to flow towards theory)? edges • Accumulation (and mass flow) is balanced by ablation and/or calving Why focus on summertime? Ice sheets are very sensitive to Normal summertime temperatures! • Ice sheet has parabolic shape. • line represents melt zone • small warming increases melt zone (horizontal area) a lot because of shape! Slightly warmer Influence of shape Warmer climate freezing line Normal freezing line ground Furthermore temperature has a powerful influence on melting rate Temperature and Ice Mass Balance Summer Temperature main factor determining ice growth e.g., a warming will Expand ablation area, lengthen melt season, increase the melt rate, and increase proportion of precip falling as rain It may also bring more precip to the region Since ablation rate increases rapidly with increasing temperature – Summer melting controls ice sheet fate* – Orbital timescales - Summer insolation must control ice sheet growth *Not true for Antarctica in near term though, where it ʼs too cold to melt much at surface Temperature and Ice Mass Balance Rule of thumb is that 1C warming causes an additional 1m of melt (see slope of ablation curve at right) -

A Globally Complete Inventory of Glaciers
Journal of Glaciology, Vol. 60, No. 221, 2014 doi: 10.3189/2014JoG13J176 537 The Randolph Glacier Inventory: a globally complete inventory of glaciers W. Tad PFEFFER,1 Anthony A. ARENDT,2 Andrew BLISS,2 Tobias BOLCH,3,4 J. Graham COGLEY,5 Alex S. GARDNER,6 Jon-Ove HAGEN,7 Regine HOCK,2,8 Georg KASER,9 Christian KIENHOLZ,2 Evan S. MILES,10 Geir MOHOLDT,11 Nico MOÈ LG,3 Frank PAUL,3 Valentina RADICÂ ,12 Philipp RASTNER,3 Bruce H. RAUP,13 Justin RICH,2 Martin J. SHARP,14 THE RANDOLPH CONSORTIUM15 1Institute of Arctic and Alpine Research, University of Colorado, Boulder, CO, USA 2Geophysical Institute, University of Alaska Fairbanks, Fairbanks, AK, USA 3Department of Geography, University of ZuÈrich, ZuÈrich, Switzerland 4Institute for Cartography, Technische UniversitaÈt Dresden, Dresden, Germany 5Department of Geography, Trent University, Peterborough, Ontario, Canada E-mail: [email protected] 6Graduate School of Geography, Clark University, Worcester, MA, USA 7Department of Geosciences, University of Oslo, Oslo, Norway 8Department of Earth Sciences, Uppsala University, Uppsala, Sweden 9Institute of Meteorology and Geophysics, University of Innsbruck, Innsbruck, Austria 10Scott Polar Research Institute, University of Cambridge, Cambridge, UK 11Institute of Geophysics and Planetary Physics, Scripps Institution of Oceanography, University of California, San Diego, La Jolla, CA, USA 12Department of Earth, Ocean and Atmospheric Sciences, University of British Columbia, Vancouver, British Columbia, Canada 13National Snow and Ice Data Center, University of Colorado, Boulder, CO, USA 14Department of Earth and Atmospheric Sciences, University of Alberta, Edmonton, Alberta, Canada 15A complete list of Consortium authors is in the Appendix ABSTRACT. The Randolph Glacier Inventory (RGI) is a globally complete collection of digital outlines of glaciers, excluding the ice sheets, developed to meet the needs of the Fifth Assessment of the Intergovernmental Panel on Climate Change for estimates of past and future mass balance. -

Glaciers and Their Significance for the Earth Nature - Vladimir M
HYDROLOGICAL CYCLE – Vol. IV - Glaciers and Their Significance for the Earth Nature - Vladimir M. Kotlyakov GLACIERS AND THEIR SIGNIFICANCE FOR THE EARTH NATURE Vladimir M. Kotlyakov Institute of Geography, Russian Academy of Sciences, Moscow, Russia Keywords: Chionosphere, cryosphere, glacial epochs, glacier, glacier-derived runoff, glacier oscillations, glacio-climatic indices, glaciology, glaciosphere, ice, ice formation zones, snow line, theory of glaciation Contents 1. Introduction 2. Development of glaciology 3. Ice as a natural substance 4. Snow and ice in the Nature system of the Earth 5. Snow line and glaciers 6. Regime of surface processes 7. Regime of internal processes 8. Runoff from glaciers 9. Potentialities for the glacier resource use 10. Interaction between glaciation and climate 11. Glacier oscillations 12. Past glaciation of the Earth Glossary Bibliography Biographical Sketch Summary Past, present and future of glaciation are a major focus of interest for glaciology, i.e. the science of the natural systems, whose properties and dynamics are determined by glacial ice. Glaciology is the science at the interfaces between geography, hydrology, geology, and geophysics. Not only glaciers and ice sheets are its subjects, but also are atmospheric ice, snow cover, ice of water basins and streams, underground ice and aufeises (naleds). Ice is a mono-mineral rock. Ten crystal ice variants and one amorphous variety of the ice are known.UNESCO Only the ice-1 variant has been – reve EOLSSaled in the Nature. A cryosphere is formed in the region of interaction between the atmosphere, hydrosphere and lithosphere, and it is characterized bySAMPLE negative or zero temperature. CHAPTERS Glaciology itself studies the glaciosphere that is a totality of snow-ice formations on the Earth's surface. -

Theoretical Design of a Non-Cyclic Cooling System Using Pykrete As a Cooling Material and Considering the System As a Heat Exchanger
International Journal of Science and Research (IJSR) ISSN (Online): 2319-7064 Index Copernicus Value (2013): 6.14 | Impact Factor (2015): 6.391 Theoretical Design of a Non-Cyclic Cooling System using Pykrete as a Cooling Material and Considering the System as a Heat Exchanger Divyashree Deore1, Sarthak Sharma2 B.E. Mechanical Engineering, Sinhgad Academy of Engineering, Pune, Maharashtra, India Abstract: A non-cyclic cooling unit was theoretically designed with supply of air similar to that of commercially available A.C. unit producing one ton of refrigeration. The minimum temperature for the design was considered to be 16℃. The element used for cooling the air is Pykrete. The various stable temperatures of Pykrete were experimentally found. Also, the cooling capacity of designed unit was found theoretically. The working principle of this system is similar to that of Thermal Energy Storage system. The calculations were carried out considering this system would act as a heat exchanger. Keywords: Non-Cyclic Cooling System, Pykrete, Stable Surface temperatures, Thermal Energy Storage System, Heat Exchanger 1. Introduction many months later, at individual building, multiuser building, district, town or even regional scale depending on In this method Pykrete is used for keeping the space at the specific technology. As examples: energy demand can be temperature below the surrounding temperature. Pykrete is a balanced between day time and night time; summer heat frozen composite material made of approximately 14 percent from solar collectors can be stored inter-seasonally for use in sawdust or some other form of wood pulp (such as paper) winter; and cold obtained from winter air can be provided and 86 percent ice by weight (6 to 1 by weight). -
Edges of Ice-Sheet Glaciology
Important Things Ice Sheets Do, but Ice Sheet Models Don’t Dr. Robert Bindschadler Chief Scientist Hydrospheric and Biospheric Sciences Laboratory NASA Goddard Space Flight Center [email protected] I’ll talk about • Why we need models – from a non-modeler • Why we need good models – recent observations have destroyed confidence in present models • Recent ice-sheet surprises • Responsible physical processes “…understanding of (possible future rapid dynamical changes in ice flow) is too limited to assess their likelihood or provide a best estimate or an upper bound for sea level rise.” IPCC Fourth Assessment Report, Summary for Policy Makers (2007) Future Sea Level is likely underestimated A1B IPCC AR4 (2007) Ice Sheets matter Globally Source: CReSIS and NASA Land area lost by 1-meter rise in sea level Impact of 1-meter sea level rise: Source: Anthoff et al., 2006 Maldives 20th Century Greenland Ice Sheet Sea level Change (mm/a) -1 0 +1 accumulation 450 Gt/a melting 225 Gt/a ice flow 225 Gt/a Approximately in “mass balance” 21st Century Greenland Ice Sheet Sea level Change (mm/a) -1 0 +1 accumulation melting ice flow Things could get a little better or a lot worse Increased ice flow will dominate the future rate of change A History Lesson • Less ice in HIGH SEA LEVEL Less warmer ice climates • Ice sheets More shrink faster LOW ice than they TEMPERATURE WARM grow • Sea level change is not COLD THEN NOW smooth Time Decreasing Mass Balance (Source: Luthcke et al., unpub.) Greenland Ice Sheet Mass Balance GREENLAND (Source: IPCC FAR) Antarctic Ice Sheet Mass Balance ANTARCTICA (Source: IPCC FAR) Pace of ice sheet changes have astonished experts is the common agent behind these changes Ice sheets HATE water! Fastest Flow at the Edges Interior: 1000’s meters thick and slow Perimeter: 100’s meters thick and fast Source: Rignot and Thomas Response time and speed of perturbation propagation are tied directly to ice flow speed 1.