AN123: Using the DAC As a Function Generator
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Chapter 3: Data Transmission Terminology
Chapter 3: Data Transmission CS420/520 Axel Krings Page 1 Sequence 3 Terminology (1) • Transmitter • Receiver • Medium —Guided medium • e.g. twisted pair, coaxial cable, optical fiber —Unguided medium • e.g. air, seawater, vacuum CS420/520 Axel Krings Page 2 Sequence 3 1 Terminology (2) • Direct link —No intermediate devices • Point-to-point —Direct link —Only 2 devices share link • Multi-point —More than two devices share the link CS420/520 Axel Krings Page 3 Sequence 3 Terminology (3) • Simplex —One direction —One side transmits, the other receives • e.g. Television • Half duplex —Either direction, but only one way at a time • e.g. police radio • Full duplex —Both stations may transmit simultaneously —Medium carries signals in both direction at same time • e.g. telephone CS420/520 Axel Krings Page 4 Sequence 3 2 Frequency, Spectrum and Bandwidth • Time domain concepts —Analog signal • Varies in a smooth way over time —Digital signal • Maintains a constant level then changes to another constant level —Periodic signal • Pattern repeated over time —Aperiodic signal • Pattern not repeated over time CS420/520 Axel Krings Page 5 Sequence 3 Analogue & Digital Signals Amplitude (volts) Time (a) Analog Amplitude (volts) Time (b) Digital CS420/520 Axel Krings Page 6 Sequence 3 Figure 3.1 Analog and Digital Waveforms 3 Periodic A ) s t l o v ( Signals e d u t 0 i l p Time m A –A period = T = 1/f (a) Sine wave A ) s t l o v ( e d u 0 t i l Time p m A –A period = T = 1/f CS420/520 Axel Krings Page 7 (b) Square wave Sequence 3 Figure 3.2 Examples of Periodic Signals Sine Wave • Peak Amplitude (A) —maximum strength of signal, in volts • FreQuency (f) —Rate of change of signal, in Hertz (Hz) or cycles per second —Period (T): time for one repetition, T = 1/f • Phase (f) —Relative position in time • Periodic signal s(t +T) = s(t) • General wave s(t) = Asin(2πft + Φ) CS420/520 Axel Krings Page 8 Sequence 3 4 Periodic Signal: e.g. -

(12) United States Patent (10) Patent No.: US 7,994,744 B2 Chen (45) Date of Patent: Aug
US007994744B2 (12) United States Patent (10) Patent No.: US 7,994,744 B2 Chen (45) Date of Patent: Aug. 9, 2011 (54) METHOD OF CONTROLLING SPEED OF (56) References Cited BRUSHLESS MOTOR OF CELING FAN AND THE CIRCUIT THEREOF U.S. PATENT DOCUMENTS 4,546,293 A * 10/1985 Peterson et al. ......... 3.18/400.14 5,309,077 A * 5/1994 Choi ............................. 318,799 (75) Inventor: Chien-Hsun Chen, Taichung (TW) 5,748,206 A * 5/1998 Yamane .......................... 34.737 2007/0182350 A1* 8, 2007 Patterson et al. ............. 318,432 (73) Assignee: Rhine Electronic Co., Ltd., Taichung County (TW) * cited by examiner Primary Examiner — Bentsu Ro (*) Notice: Subject to any disclaimer, the term of this (74) Attorney, Agent, or Firm — Browdy and Neimark, patent is extended or adjusted under 35 PLLC U.S.C. 154(b) by 539 days. (57) ABSTRACT The present invention relates to a method and a circuit of (21) Appl. No.: 12/209,037 controlling a speed of a brushless motor of a ceiling fan. The circuit includes a motor PWM duty consumption sampling (22) Filed: Sep. 11, 2008 unit and a motor speed sampling to sense a PWM duty and a speed of the brushless motor. A central processing unit is (65) Prior Publication Data provided to compare the PWM duty and the speed of the brushless motor to a preset maximum PWM duty and a preset US 201O/OO6O224A1 Mar. 11, 2010 maximum speed. When the PWM duty reaches to the preset maximum PWM duty first, the central processing unit sets the (51) Int. -

A Soft-Switched Square-Wave Half-Bridge DC-DC Converter
A Soft-Switched Square-Wave Half-Bridge DC-DC Converter C. R. Sullivan S. R. Sanders From IEEE Transactions on Aerospace and Electronic Systems, vol. 33, no. 2, pp. 456–463. °c 1997 IEEE. Personal use of this material is permitted. However, permission to reprint or republish this material for advertising or promotional purposes or for creating new collective works for resale or redistribution to servers or lists, or to reuse any copyrighted component of this work in other works must be obtained from the IEEE. I. INTRODUCTION This paper introduces a constant-frequency zero-voltage-switched square-wave dc-dc converter Soft-Switched Square-Wave and presents results from experimental half-bridge implementations. The circuit is built with a saturating Half-Bridge DC-DC Converter magnetic element that provides a mechanism to effect both soft switching and control. The square current and voltage waveforms result in low voltage and current stresses on the primary switch devices and on the secondary rectifier diodes, equal to those CHARLES R. SULLIVAN, Member, IEEE in a standard half-bridge pulsewidth modulated SETH R. SANDERS, Member, IEEE (PWM) converter. The primary active switches exhibit University of California zero-voltage switching. The output rectifiers also exhibit zero-voltage switching. (In a center-tapped secondary configuration the rectifier does have small switching losses due to the finite leakage A constant-frequency zero-voltage-switched square-wave inductance between the two secondary windings on dc-dc converter is introduced, and results from experimental the transformer.) The VA rating, and hence physical half-bridge implementations are presented. A nonlinear magnetic size, of the nonlinear reactor is small, a fraction element produces the advantageous square waveforms, and of that of the transformer in an isolated circuit. -

The 1-Bit Instrument: the Fundamentals of 1-Bit Synthesis
BLAKE TROISE The 1-Bit Instrument The Fundamentals of 1-Bit Synthesis, Their Implementational Implications, and Instrumental Possibilities ABSTRACT The 1-bit sonic environment (perhaps most famously musically employed on the ZX Spectrum) is defined by extreme limitation. Yet, belying these restrictions, there is a surprisingly expressive instrumental versatility. This article explores the theory behind the primary, idiosyncratically 1-bit techniques available to the composer-programmer, those that are essential when designing “instruments” in 1-bit environments. These techniques include pulse width modulation for timbral manipulation and means of generating virtual polyph- ony in software, such as the pin pulse and pulse interleaving techniques. These methodologies are considered in respect to their compositional implications and instrumental applications. KEYWORDS chiptune, 1-bit, one-bit, ZX Spectrum, pulse pin method, pulse interleaving, timbre, polyphony, history 2020 18 May on guest by http://online.ucpress.edu/jsmg/article-pdf/1/1/44/378624/jsmg_1_1_44.pdf from Downloaded INTRODUCTION As unquestionably evident from the chipmusic scene, it is an understatement to say that there is a lot one can do with simple square waves. One-bit music, generally considered a subdivision of chipmusic,1 takes this one step further: it is the music of a single square wave. The only operation possible in a -bit environment is the variation of amplitude over time, where amplitude is quantized to two states: high or low, on or off. As such, it may seem in- tuitively impossible to achieve traditionally simple musical operations such as polyphony and dynamic control within a -bit environment. Despite these restrictions, the unique tech- niques and auditory tricks of contemporary -bit practice exploit the limits of human per- ception. -

Characterization Quaternaty Lookup Table in Standard Cmos Process
International Research Journal of Engineering and Technology (IRJET) e-ISSN: 2395-0056 Volume: 02 Issue: 07 | Oct-2015 www.irjet.net p-ISSN: 2395-0072 CHARACTERIZATION QUATERNATY LOOKUP TABLE IN STANDARD CMOS PROCESS S.Prabhu Venkateswaran1, R.Selvarani2 1Assitant Professor, Electronics and Communication Engineering, SNS College of Technology,Tamil Nadu, India 2 PG Scholar, VLSI Design, SNS College Of Technology, Tamil Nadu, India -------------------------------------------------------------------------**------------------------------------------------------------------------ Abstract- The Binary logics and devices have been process gets low power and easy to scale down, gate of developed with an latest technology and gate design MOS need much lower driving current than base current of area. The design and implementation of logical circuits two polar, scaling down increase CMOS speed Comparing become easier and compact. Therefore present logic MVL present high power consumption, due to current devices that can implement in binary and multi valued mode circuit element or require nonstandard multi logic system. In multi-valued logic system logic gates threshold CMOS technologies. multiple-value logic are increase the high power required for level of transition varies in different logic systems, a quaternary has and increase the number of required interconnections become mature in terms of logic algebra and gates. ,hence also increasing the overall energy. Interconnections Some multi valued logic systems such as ternary and are increase the dominant contributor to delay are and quaternary logic schemes have been developed. energy consumption in CMOS digital circuit. Quaternary logic has many advantages over binary logic. Since it require half the number of digits to store 2. QUATERNARY LOGIC AND LUTs any information than its binary equivalent it is best for storage; the quaternary storage mechanism is less than Ternary logic system: It is based upon CMOS compatible twice as complex as the binary system. -

Tracking of High-Speed, Non-Smooth and Microscale-Amplitude Wave Trajectories
Tracking of High-speed, Non-smooth and Microscale-amplitude Wave Trajectories Jiradech Kongthon Department of Mechatronics Engineering, Assumption University, Suvarnabhumi Campus, Samuthprakarn, Thailand Keywords: High-speed Tracking, Inversion-based Control, Microscale Positioning, Reduced-order Inverse, Tracking. Abstract: In this article, an inversion-based control approach is proposed and presented for tracking desired trajectories with high-speed (100Hz), non-smooth (triangle and sawtooth waves), and microscale-amplitude (10 micron) wave forms. The interesting challenge is that the tracking involves the trajectories that possess a high frequency, a microscale amplitude, sharp turnarounds at the corners. Two different types of wave trajectories, which are triangle and sawtooth waves, are investigated. The model, or the transfer function of a piezoactuator is obtained experimentally from the frequency response by using a dynamic signal analyzer. Under the inversion-based control scheme and the model obtained, the tracking is simulated in MATLAB. The main contributions of this work are to show that (1) the model and the controller achieve a good tracking performance measured by the root mean square error (RMSE) and the maximum error (Emax), (2) the maximum error occurs at the sharp corner of the trajectories, (3) tracking the sawtooth wave yields larger RMSE and Emax values,compared to tracking the triangle wave, and (4) in terms of robustness to modeling error or unmodeled dynamics, Emax is still less than 10% of the peak to peak amplitude of 20 micron if the increases in the natural frequency and the damping ratio are less than 5% for the triangle trajectory and Emax is still less than 10% of the peak to peak amplitude of 20 micron if the increases in the natural frequency and the damping ratio are less than 3.2 % for the sawtooth trajectory. -
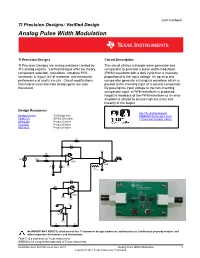
Verified Design Analog Pulse Width Modulation
John Caldwell TI Precision Designs: Verified Design Analog Pulse Width Modulation TI Precision Designs Circuit Description TI Precision Designs are analog solutions created by This circuit utilizes a triangle wave generator and TI’s analog experts. Verified Designs offer the theory, comparator to generate a pulse-width-modulated component selection, simulation, complete PCB (PWM) waveform with a duty cycle that is inversely schematic & layout, bill of materials, and measured proportional to the input voltage. An op amp and performance of useful circuits. Circuit modifications comparator generate a triangular waveform which is that help to meet alternate design goals are also passed to the inverting input of a second comparator. discussed. By passing the input voltage to the non-inverting comparator input, a PWM waveform is produced. Negative feedback of the PWM waveform to an error amplifier is utilized to ensure high accuracy and linearity of the output Design Resources Ask The Analog Experts Design Archive All Design files WEBENCH® Design Center TINA-TI™ SPICE Simulator TI Precision Designs Library OPA2365 Product Folder TLV3502 Product Folder REF3325 Product Folder R4 C1 VCC R3 - VPWM + VIN VREF R1 + ++ + U1A - U2A V R2 C2 CC VTRI C3 R7 - ++ U1B VREF VCC VREF - ++ U2B VCC R6 R5 An IMPORTANT NOTICE at the end of this TI reference design addresses authorized use, intellectual property matters and other important disclaimers and information. TINA-TI is a trademark of Texas Instruments WEBENCH is a registered trademark of Texas Instruments SLAU508-June 2013-Revised June 2013 Analog Pulse Width Modulation 1 Copyright © 2013, Texas Instruments Incorporated www.ti.com 1 Design Summary The design requirements are as follows: Supply voltage: 5 Vdc Input voltage: -2 V to +2 V, dc coupled Output: 5 V, 500 kHz PWM Ideal transfer function: V The design goals and performance are summarized in Table 1. -

The Oscilloscope and the Function Generator: Some Introductory Exercises for Students in the Advanced Labs
The Oscilloscope and the Function Generator: Some introductory exercises for students in the advanced labs Introduction So many of the experiments in the advanced labs make use of oscilloscopes and function generators that it is useful to learn their general operation. Function generators are signal sources which provide a specifiable voltage applied over a specifiable time, such as a \sine wave" or \triangle wave" signal. These signals are used to control other apparatus to, for example, vary a magnetic field (superconductivity and NMR experiments) send a radioactive source back and forth (M¨ossbauer effect experiment), or act as a timing signal, i.e., \clock" (phase-sensitive detection experiment). Oscilloscopes are a type of signal analyzer|they show the experimenter a picture of the signal, usually in the form of a voltage versus time graph. The user can then study this picture to learn the amplitude, frequency, and overall shape of the signal which may depend on the physics being explored in the experiment. Both function generators and oscilloscopes are highly sophisticated and technologically mature devices. The oldest forms of them date back to the beginnings of electronic engineering, and their modern descendants are often digitally based, multifunction devices costing thousands of dollars. This collection of exercises is intended to get you started on some of the basics of operating 'scopes and generators, but it takes a good deal of experience to learn how to operate them well and take full advantage of their capabilities. Function generator basics Function generators, whether the old analog type or the newer digital type, have a few common features: A way to select a waveform type: sine, square, and triangle are most common, but some will • give ramps, pulses, \noise", or allow you to program a particular arbitrary shape. -

A Reduced-Complexity Lookup Table Approach to Solving Mathematical Functions in Fpgas
A reduced-complexity lookup table approach to solving mathematical functions in FPGAs Michael Low, Jim P. Y. Lee Defence R&D Canada --- Ottawa Technical Memorandum DRDC Ottawa TM 2008-261 December 2008 A reduced-complexity lookup table approach to solving mathematical functions in FPGAs Michael Low Jim P. Y. Lee DRDC Ottawa Defence R&D Canada – Ottawa Technical Memorandum DRDC Ottawa TM 2008-261 December 2008 Principal Author Original signed by Michael Low Michael Low Defence Scientist, Radar Electronic Warfare Approved by Original signed by Jean-F. Rivest Jean-F. Rivest Head, Radar Electronic Warfare Approved for release by Original signed by Pierre Lavoie Pierre Lavoie Chief Scientist, DRDC Ottawa © Her Majesty the Queen in Right of Canada, as represented by the Minister of National Defence, 2008 © Sa Majesté la Reine (en droit du Canada), telle que représentée par le ministre de la Défense nationale, 2008 Abstract …….. Certain mathematical functions, such as the inverse, log, and arctangent, have traditionally been implemented in the digital domain using the Coordinate Rotation Digital Computer (CORDIC) algorithm. In this study, it is shown that it is possible to achieve a similar degree of numerical accuracy using a reduced-complexity lookup table (RCLT) algorithm, which is much less computationally-intensive than the CORDIC. On programmable digital signal processor (DSP) chips, this reduces computation time. On field-programmable gate arrays (FPGAs), and application-specific integrated circuits (ASICs), this reduces the consumption of hardware resources. This paper presents the results of a study in which three commonly-used functions, i.e. inverse, log, and arctangent functions, have been synthesized for the Xilinx Virtex-II family of FPGAs, using both the RCLT and CORDIC implementations. -

The Differential Pair As a Triangle-Sine Wave Converter V - ROBERT G
418 IEEE JOURNAL OF SOLID-STATE CIRCUITS, JUNE 1976 Correspondence The Differential Pair as a Triangle-Sine Wave Converter v - ROBERT G. MEYER, WILLY M. C. SANSEN, SIK LUI, AND STEFAN PEETERS R~ R~ 1 / Abstract–The performance of a differential pair with emitter degen- eration as a triangle-sine wave converter is analyzed. Equations describ- ing the circuit operation are derived and solved both analytically and by computer. This allows selection of operating conditions for optimum performance such that total harmonic distortion as low as 0.2 percent “- has been measured. -vEE (a) I. INTRODUCTION The conversion of ttiangle waves to sine waves is a function I ---- I- often required in waveshaping circuits. For example, the oscil- lators used in function generators usually generate triangular output waveforms [ 1] because of the ease with which such oscillators can operate over a wide frequency range including very low frequencies. This situation is also common in mono- r v, Zr t lithic oscillators [2] . Sinusoidal outputs are commonly de- sired in such oscillators and can be achieved by use of a non- linear circuit which produces an output sine wave from an input triangle wave. — — — — The above circuit function has been realized in the past by -I -I ----- means of a piecewise linear approximation using diode shaping J ‘“b ‘M VI networks [ 1] . However, a simpler approach and one well M suited to monolithic realization has been suggested by Grebene [3] . This is shown in Fig. 1 and consists simply of a differen- 77 tial pair with an appropriate value of emitter resistance R. -
Cable Testing TELECOMMUNICATIONS and NETWORKING Analog Signals
Cable Testing TELECOMMUNICATIONS AND NETWORKING Analog Signals 2 Digital Signals • Square waves, like sine waves, are periodic. • However, square wave graphs do not continuously vary with time. • The wave holds one value for some time, and then suddenly changes to a different value. • This value is held for some time, and then quickly changes back to the original value. • Square waves represent digital signals, or pulses. Like all waves, square waves can be described in terms of amplitude, period, and frequency. 3 Digital and Analog Bandwidth • Bandwidth = The width or carrying capacity of a communications circuit. • Analog bandwidth = the range of frequencies the circuit can carry ◦ used in analog communications such as voice (telephones) ◦ measured in Hertz (Hz), cycles per second ◦ voice-grade telephone lines have a 3,100 Hz bandwidth • Digital bandwidth = the number of bits per second (bps) the circuit can carry ◦ used in digital communications such as T-1 or DDS ◦ measure in bps ◦ T-1 -> 1.544 Mbps 4 Digital and Analog Bandwidth DTE DCE PSTN Dial-up network digital analog Modulation DTE DCE PSTN Dial-up network digital analog Demodulation • Digital Signals (square wave) ◦ digital signal = a signal whose state consists of discrete elements such as high or low, on or off • Analog Signals (sine wave) ◦ analog signal = a signal which is “analogous” to sound waves ◦ telephone lines are designed to carry analog signals 5 Transmission Terminology • Broadband transmission ◦ In general, broadband refers to telecommunication in which a wide band of frequencies is available to transmit information. ◦ Because a wide band of frequencies is available, information can be multiplexed and sent on many different frequencies or channels within the band concurrently, allowing more information to be transmitted in a given amount of time (much as more lanes on a highway allow more cars to travel on it at the same time). -
Tektronix Signal Generator
Signal Generator Fundamentals Signal Generator Fundamentals Table of Contents The Complete Measurement System · · · · · · · · · · · · · · · 5 Complex Waves · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · 15 The Signal Generator · · · · · · · · · · · · · · · · · · · · · · · · · · · · 6 Signal Modulation · · · · · · · · · · · · · · · · · · · · · · · · · · · 15 Analog or Digital? · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · 7 Analog Modulation · · · · · · · · · · · · · · · · · · · · · · · · · 15 Basic Signal Generator Applications· · · · · · · · · · · · · · · · 8 Digital Modulation · · · · · · · · · · · · · · · · · · · · · · · · · · 15 Verification · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · 8 Frequency Sweep · · · · · · · · · · · · · · · · · · · · · · · · · · · 16 Testing Digital Modulator Transmitters and Receivers · · 8 Quadrature Modulation · · · · · · · · · · · · · · · · · · · · · 16 Characterization · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · 8 Digital Patterns and Formats · · · · · · · · · · · · · · · · · · · 16 Testing D/A and A/D Converters · · · · · · · · · · · · · · · · · 8 Bit Streams · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · 17 Stress/Margin Testing · · · · · · · · · · · · · · · · · · · · · · · · · · · 9 Types of Signal Generators · · · · · · · · · · · · · · · · · · · · · · 17 Stressing Communication Receivers · · · · · · · · · · · · · · 9 Analog and Mixed Signal Generators · · · · · · · · · · · · · · 18 Signal Generation Techniques