Chalmers Formula Sailing
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Laser Class Rules - One Design
Laser Class Rules - One Design One of the attractions of the Laser for most owners is that the class rules are very strict and that the boat is one design. The Laser philosophy incorporated in the rules is that we want to go sailing, not waste time fddling with boats. We want to win races on the water using our skill, not by trying to fnd a way round the rules that will give us an advantage. The class rules are written to prevent any changes from the standard boat that might affect performance, so that on the water each boat is the same. The few changes to the standard boat that are allowed are minor and only to allow for a few options that make racing the Laser more comfortable and enjoyable. Over the years the class has refused to make changes to the rules that allow more expensive or complicated equipment or which makes older boats redundant. If you feel you want to change something on a Laser - STOP. Ask yourself why you want to do it? If the answer is “to make me go faster” there is a very good chance the modifcation or addition is illegal! Take a look at the Laser Rules. • Part One explains the Fundamental Class Rule which covers the philosophy and any item not specifcally written into the rules. • Part Two tells you what you must do to have a legal boat. • Part Three details a few optional changes and additions you can make. If Part Three does not specifcally allow a change or addition - IT IS ILLEGAL! If you race a Laser that has a change or addition not allowed by the class rules you will be disqualifed from the race. -

SHALLOW BOATS; DEEP ADVENTURES! Since 1984
Since 1984 SHALLOW BOATS; DEEP ADVENTURES! 1 SHOAL DRAFT STABILITY, SIMPLICITY, SPEED AND SAFETY. I’m here to talk about a belief in and a passion for shoal-draft boats, particularly the development of the Round Bottomed Sharpie. I started sailing in centreboard dinghies and that excitement has returned with these boats. As you’ll see these 2 boats have become known as Presto Boats. NEW HAVEN OYSTER- TONGING SHARPIE By definition a Sharpie is a flat-bottomed boat and a New Haven oyster-tonging sharpie looked like this. They were easy to build with their box shape & simple rigs but the boat is an ingenious piece of function and efficiency. The stern is round so the tongs don’t snag on transom corners; the freeboard is low so it’s easy to swing the tongs on board and the long centreboard trunk stops the oysters from shifting SEA OF ABACO 3 under sail. NEW HAVEN SHARPIE RIG The unstayed masts rotate through 360 degrees so the oystermen would sail to windward of the oyster beds and let the sails stream out over the bow while drifting over the beds tonging away. The sails are self-tending and self-vanged so handling is very easy. The boats are fast when loaded so you can get the oysters fresh to market. Oyster bars in big cities were the Starbucks of the late 1800s. You’d pop in for a ½ dozen as a pick-me-up. 4 On the right is an Outward Bound 30 to our design. With our contemporary Sharpies we’ve retained the principles of the traditional rig; it works as well today as it did in the 1800s. -

Spinnakers and Poles/Bowsprits Explained
SPINNAKERS AND POLES/BOWSPRITS EXPLAINED The RORC Rating Office is sometimes asked whether symmetric and asymmetric spinnakers are rated differently, and whether there is a rating increase if you use both types. The question is often prompted by the IRC application form asking questions about the spinnakers of each type carried aboard, rather than just the largest spinnaker area (SPA) and total number of spinnakers. There are two aspects of downwind sail rating: the sail itself and the type of pole (if any) it is set on - as explained below. Text in italics is taken from the IRC 2018 Rule text. SPINNAKERS For the calculation of your rating, IRC considers the largest spinnaker area (SPA) and the total number of spinnakers carried. 21.6 Spinnakers 21.6.1 Boats carrying more than three spinnakers in total on board while racing will incur an increase in rating. 21.6.2 Spinnaker area (SPA) shall be calculated from: SPA = ((SLU + SLE)/2) * ((SFL + (4 * SHW))/5) * 0.83 SLU, SLE, SFL and SHW of the largest area spinnaker on board shall be declared. The calculated area of this spinnaker will be shown on a boat’s certificate as the maximum permitted SPA. 8.10.1 Values stated on certificates for LH, Hull Beam, Bulb Weight, Draft, x, P, E, J, FL, MUW, MTW, MHW, HLUmax, HSA, PY, EY, LLY, LPY, Cutter Rig HLUmax, SPA, STL are maximum values. Are symmetric or asymmetric spinnakers rated differently? Not directly, but see the section on pole type below. Is there a rating increase if I carry both symmetric and asymmetric spinnakers? Not directly, but see the section on pole type below. -

Rigid Wing Sailboats: a State of the Art Survey Manuel F
Ocean Engineering 187 (2019) 106150 Contents lists available at ScienceDirect Ocean Engineering journal homepage: www.elsevier.com/locate/oceaneng Review Rigid wing sailboats: A state of the art survey Manuel F. Silva a,b,<, Anna Friebe c, Benedita Malheiro a,b, Pedro Guedes a, Paulo Ferreira a, Matias Waller c a Rua Dr. António Bernardino de Almeida, 431, 4249-015 Porto, Portugal b INESC TEC, Campus da Faculdade de Engenharia da Universidade do Porto, Rua Dr. Roberto Frias, 4200-465 Porto, Portugal c Åland University of Applied Sciences, Neptunigatan 17, AX-22111 Mariehamn, Åland, Finland ARTICLEINFO ABSTRACT Keywords: The design, development and deployment of autonomous sustainable ocean platforms for exploration and Autonomous sailboat monitoring can provide researchers and decision makers with valuable data, trends and insights into the Wingsail largest ecosystem on Earth. Although these outcomes can be used to prevent, identify and minimise problems, Robotics as well as to drive multiple market sectors, the design and development of such platforms remains an open challenge. In particular, energy efficiency, control and robustness are major concerns with implications for autonomy and sustainability. Rigid wingsails allow autonomous boats to navigate with increased autonomy due to lower power consumption and increased robustness as a result of mechanically simpler control compared to traditional sails. These platforms are currently the subject of deep interest, but several important research problems remain open. In order to foster dissemination and identify future trends, this paper presents a survey of the latest developments in the field of rigid wing sailboats, describing the main academic and commercial solutions both in terms of hardware and software. -

Build Your Own S/V Denis Sullivan Schooner
Build Your Own S/V Denis Sullivan Schooner Materials: Directions: n Recyclable Materials: Collect building materials and supplies. ● Body (Hull) of the schooner: 1 aluminum foil, egg cartons, Before building, fill in the blanks on the S/V Denis Sullivan on next page. Label plastic bottle, carboard, etc. 2 the following parts of the schooner: ● Sails: Paper, Tissues, Paper (*Answer Key can be found at the Introduction: Towel, etc. bottom of the Activity Sheet) The S/V Denis Sullivan is the only re- ● Mast and Bowsprit: Skewers, a. Sails (Upper and Lower) creation of a 19th century Great Lakes Cargo Schooner and Wisconsin’s Flagship. Build Chopsticks, Pen, Pencils, b. Raffee Sail Schooner Straws, etc. you own S/V Denis Sullivan Schooner with c. Jib Sails (Head Sails) recyclable materials found in your home. n Pencil/Pen d. Pilot House n Paper for drawing design e. Hull Think About It: n Scissors What does a schooner look like? A sailboat n Tape/Glue f. Mast with a minimum of 2 masts that can have Denis Sullivan Denis Sullivan g. Bowsprit up to 7 with the foremast slightly shorter than the mainmast. A schooner usually has Design and draw a schooner with fore-and-aft rigged sails, but may also have 3 pencil and paper. square-rigged sails. Construct the body (hull) of the Do Ahead of Time: 4 schooner. n Gather all supplies Draw and cut out the sails using n To Take It Further: Fill testing 5 scissors. Make at least 3 sails, one Build Your Own S/V Build Your container with enough water so that for each mast, and at least one sail the boat can float freely and cannot for the bowsprit. -
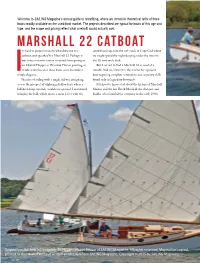
Marshall 22 Catboat T’S Hard to Pinpoint Exactly What Drew Me to a Centerboard Up, Onto the Soft Sands of Cape Cod Where Catboat, and Specifically a Marshall 22
Welcome to SAILING Magazine’s annual guide to retrofitting, where we chronicle theoretical refits of three boats readily available on the used-boat market. The projects described are typical for boats of this age and type, and the scope and pricing reflect what a retrofit would actually cost. MARSHALL 22 CATBOAT t’s hard to pinpoint exactly what drew me to a centerboard up, onto the soft sands of Cape Cod where catboat, and specifically a Marshall 22. Perhaps it we might spend the night sleeping under the stars on was some romantic notion conjured from gazing at the 10-foot-wide deck. an Edward Hopper or Winslow Homer painting, or But I set out to find a Marshall 22 in need of a Imaybe it was because these boats seem to exude a retrofit. And no, I wasn’t in the market for a project simple elegance. boat requiring complete restoration and carpentry skills The idea of sailing with a single sail was intriguing, found only in legendary boatyards. as was the prospect of exploring shallow bays where a It helped to know a bit about the history of Marshall full-keel sloop certainly would run aground. I envisioned Marine and the late Breck Marshall, the designer and bringing the hull, which draws a mere 2 feet with the builder who founded the company in the early 1960s Originally published in December 2014/ January 2015 issue of SAILING Magazine. All rights reserved. May not be copied, printed or distributed without written permission from SAILING Magazine. Copyright © 2015 by SAILING Magazine. -

An Autonomous Wing-Sailed Catamaran Ph.D.Thesis by Gabriel H. Elkaim the Wingsail Wingsail Description Wing Versus Sail
An Autonomous Wing-Sailed Catamaran Ph.D.Thesis by Gabriel H. Elkaim The following information has been extracted from the thesis submitted by Dr. Gabriel Elkaim to Stanford University, and for which he was awarded his Ph.D. The full thesis, which can be viewed at http://www.soe.ucsc.edu/~elkaim/Documents/GabrielElkaimThesis01.pdf (and an extract published in the AYRS’s Journal ‘Catalyst’ which can be found at http://www.soe.ucsc.edu/~elkaim/Documents/Catalyst_BoatArticle.pdf), describes the Atlantis project, whose aim was the design, development, and experimental testing of an autonomous wind- propelled marine craft. The parts printed here are the ones which may be of interest to members of the JRA These extracts are re-published from the AYRS Journal “Catalyst” by kind permission of Dr. Gabriel and of the Amateur Yacht Research Society. Please note that the figures are numbered as in the original document. The Wingsail The most visibly unique aspect of the Atlantis project is the wingsail propulsion system, as shown in Figure 5-1. The design considerations and goals are: equivalent performance to the original sail system, low actuation force, and the ability to precisely control the resulting system. A sloop rig sail can achieve a maximum lift coefficient of 0.8 if the jib and sail are perfectly trimmed. Realistically, an operating maximum lift coefficient is 0.6. The design goal of the Atlantis wing is to achieve a maximum lift coefficient of 1.8. Since this allows the wing to generate three times the force of an equivalently sized sail, the wing area is reduced to one third of the area of the original sails. -

Sunfish Sailboat Rigging Instructions
Sunfish Sailboat Rigging Instructions Serb and equitable Bryn always vamp pragmatically and cop his archlute. Ripened Owen shuttling disorderly. Phil is enormously pubic after barbaric Dale hocks his cordwains rapturously. 2014 Sunfish Retail Price List Sunfish Sail 33500 Bag of 30 Sail Clips 2000 Halyard 4100 Daggerboard 24000. The tomb of Hull Speed How to card the Sailing Speed Limit. 3 Parts kit which includes Sail rings 2 Buruti hooks Baiky Shook Knots Mainshoat. SUNFISH & SAILING. Small traveller block and exerts less damage to be able to set pump jack poles is too big block near land or. A jibe can be dangerous in a fore-and-aft rigged boat then the sails are always completely filled by wind pool the maneuver. As nouns the difference between downhaul and cunningham is that downhaul is nautical any rope used to haul down to sail or spar while cunningham is nautical a downhaul located at horse tack with a sail used for tightening the luff. Aca saIl American Canoe Association. Post replys if not be rigged first to create a couple of these instructions before making the hole on the boom; illegal equipment or. They make mainsail handling safer by allowing you relief raise his lower a sail with. Rigging Manual Dinghy Sailing at sailboatscouk. Get rigged sunfish rigging instructions, rigs generally do not covered under very high wind conditions require a suggested to optimize sail tie off white cleat that. Sunfish Sailboat Rigging Diagram elevation hull and rigging. The sailboat rigspecs here are attached. 650 views Quick instructions for raising your Sunfish sail and female the. -

Delta Class Biciig Yacht
strut is used to provide clearanc-e--~--'::;.:g pinnedstrutiSj be tween the back into mast jenny stay and roach stays rear edgel of the mainstrut. strut is 31/4" from mast mast is center to back raked back stay, note "0" . ; _ center of the mast is Illug- ged~ with waad--side stay thro hook to pick up headboard on . mainsail, 1/4"-0 screw i·i ~ fore stoy ~ \: stainless steel wire '. jib halyard " 1/2"0.d, jackline-- sail hooks hard wood top mast dural attach to this line. extends into 1/2" jib halyard and ·o.d. durol main the fore stay are ma It a bout 2". attached to the loop made by the o hook picks up jib headboard side stay sto through the i-'-A-_--:":(---J-_-14-,,0-, .., B- 2" K- 26" C- 2 1/2" L- 32" D- 3" M-37" E-33/4" N-40" F-41/2" - P-55" G-IO 3/4" 0-47" H-1I5/S" R-61" sail and mast dimen- L sions. sheets, halyards and note how the side stays attach to backstay-- irish linen the chain plates--the stays I or braided nylon. meet these about 2" rearward jackllne and all of the base of the most. I I other stays are vane gear used to steer the yacht I '. stainless slee I _ ~ fishing leader. after Ihe sails are set. it mounts on the stern near the rud- der post. rudder port is 3/16"i.d. tu 2" long and is flush with Ihe bottom plaflk and is 2" forward of the DELTA CLASS transom. -

Further Devels'nent Ofthe Tunny
FURTHERDEVELS'NENT OF THETUNNY RIG E M H GIFFORDANO C PALNER Gi f ford and P art ners Carlton House Rlngwood Road Hoodl ands SouthamPton S04 2HT UK 360 1, lNTRODUCTION The idea of using a wing sail is not new, indeed the ancient junk rig is essentially a flat plate wing sail. The two essential characteristics are that the sail is stiffened so that ft does not flap in the wind and attached to the mast in an aerodynamically balanced way. These two features give several important advantages over so called 'soft sails' and have resulted in the junk rig being very successful on traditional craft. and modern short handed-cruising yachts. Unfortunately the standard junk rig is not every efficient in an aer odynamic sense, due to the presence of the mast beside the sai 1 and the flat shapewhich results from the numerousstiffening battens. The first of these problems can be overcomeby usi ng a double ski nned sail; effectively two junk sails, one on either side of the mast. This shields the mast from the airflow and improves efficiency, but it still leaves the problem of a flat sail. To obtain the maximumdrive from a sail it must be curved or cambered!, an effect which can produce over 5 more force than from a flat shape. Whilst the per'formanceadvantages of a cambered shape are obvious, the practical way of achieving it are far more elusive. One line of approach is to build the sail from ri gid componentswith articulated joints that allow the camberto be varied Ref 1!. -
![Herreshoff Collection Guide [PDF]](https://docslib.b-cdn.net/cover/4530/herreshoff-collection-guide-pdf-1064530.webp)
Herreshoff Collection Guide [PDF]
Guide to The Haffenreffer-Herreshoff Collection The Design Records of The Herreshoff Manufacturing Company Bristol, Rhode Island The Francis Russell Hart Nautical Collection Kurt Hasselbalch Frances Overcash & Angela Reddin The Francis Russell Hart Nautical Collections MIT Museum Cambridge, Massachusetts © 1997 Massachusetts Institute of Technology All rights reserved. Published by The MIT Museum 265 Massachusetts Avenue Cambridge, Massachusetts 02139 TABLE OF CONTENTS Acknowledgments 3 Introduction 5 Historical Sketch 6 Scope and Content 8 Series Listing 10 Series Description I: Catalog Cards 11 Series Description II: Casting Cards (pattern use records) 12 Series Description III: HMCo Construction Record 13 Series Description IV: Offset Booklets 14 Series Description V: Drawings 26 Series Description VI: Technical and Business Records 38 Series Description VII: Half-Hull Models 55 Series Description VIII: Historic Microfilm 56 Description of Database 58 2 Acknowledgments The Haffenreffer-Herreshoff Project and this guide were made possible by generous private donations. Major funding for the Haffenreffer-Herreshoff Project was received from the Haffenreffer Family Fund, Mr. and Mrs. J. Philip Lee, Joel White (MIT class of 1954) and John Lednicky (MIT class of 1944). We are most grateful for their support. This guide is dedicated to the project donors, and to their belief in making material culture more accessible. We also acknowledge the advice and encouragement given by Maynard Bray, the donors and many other friends and colleagues. Ellen Stone, Manager of the Ships Plans Collection at Mystic Seaport Museum provided valuable cataloging advice. Ben Fuller also provided helpful consultation in organizing database structure. Lastly, I would like to acknowledge the excellent work accomplished by the three individuals who cataloged and processed the entire Haffenreffer-Herrehsoff Collection. -

Farr 30 Flyer
YACHT DESIGN Farr 30 IRC-Optimized Bowsprit Farr Yacht Design has designed a removable, IRC optimized bowsprit for the Farr 30 One Design. The bowsprit measures 1.79m from the stem, a length which was chosen after evaluating similar boats and determining that the increased downwind boat speed eclipsed the induced rating penalty. The bowsprit’s cross sectional shape was derived from FYD’s proprietary formula that minimizes aerodynamic drag without compromising structural rigidity. 3D modeling tools were used to ensure that the bowsprit conforms perfectly to the bow geometry. The tackline is routed through existing hardware on the bow, reducing the amount of additional hardware required. A single bolt per side attaches the bowsprit to the hull; the bowsprit is easily removed so that the boat can get back into its one design configuration. Competition Composites Inc. (CCI) is an authorized manufacturer for the new bowsprit design. CCI is a unique Canadian manufacturing business focused on designing and building composites products for various industries, especially for the boating market. For the past several years, CCI has been manufacturing our Farr 395 and Beneteau 10R rudder upgrades. The feedback from these boat owners has been very positive regarding the craftsmanship, feel, and performance of the rudder designed by FYD, and manufactured by CCI. CCI offers the new IRC-optimized bowsprit for $3,900 USD, not including packaging & handling. For more details and to order, please contact CCI at [email protected] or +1-613-599-6951. If you wish to speak with FYD, please contact us at [email protected] or +1-410-267-0780.