Autonomous Execution of Aircraft Supermaneuvers with Switching Nonlinear Backstepping Control
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
22. Maneuvering at High Angle and Rate
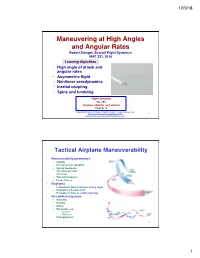
12/3/18 Maneuvering at High Angles and Angular Rates Robert Stengel, Aircraft Flight Dynamics MAE 331, 2018 Learning Objectives • High angle of attack and angular rates • Asymmetric flight • Nonlinear aerodynamics • Inertial coupling • Spins and tumbling Flight Dynamics 681-785 Airplane Stability and Control Chapter 8 Copyright 2018 by Robert Stengel. All rights reserved. For educational use only. http://www.princeton.edu/~stengel/MAE331.html 1 http://www.princeton.edu/~stengel/FlightDynamics.html Tactical Airplane Maneuverability • Maneuverability parameters – Stability – Roll rate and acceleration – Normal load factor – Thrust/weight ratio – Pitch rate – Transient response – Control forces • Dogfights – Preferable to launch missiles at long range – Dogfight is a backup tactic – Preferable to have an unfair advantage • Air-combat sequence – Detection – Closing – Attack – Maneuvers, e.g., • Scissors • High yo-yo – Disengagement 2 1 12/3/18 Coupling of Longitudinal and Lateral-Directional Motions 3 Longitudinal Motions can Couple to Lateral-Directional Motions • Linearized equations have limited application to high-angle/high-rate maneuvers – Steady, non-zero sideslip angle (Sec. 7.1, FD) – Steady turn (Sec. 7.1, FD) – Steady roll rate " F FLon % F = $ Lon Lat−Dir ' $ FLat−Dir F ' # Lon Lat−Dir & Lon Lat−Dir FLat−Dir , FLon ≠ 0 4 2 12/3/18 Stability Boundaries Arising From Asymmetric Flight Northrop F-5E NASA CR-2788 5 Stability Boundaries with Nominal Sideslip, βo, and Roll Rate, po NASA CR-2788 6 3 12/3/18 Pitch-Yaw Coupling Due To Steady -
Seeds of Armageddon -1.Pdf
1 | The Seeds of Armageddon Copyright 2012 Kerry Plowright. All rights reserved. No part of this publication may be reproduced, stored in a retrieval system, or transmitted in any form or by any means, electronic, mechanical, photocopying, recording or otherwise, without the prior permission of the author. 11 North Point Avenue, Kingscliff NSW 2487, Australia The right of Kerry Plowright to be identified as the author of this work has been asserted in accordance with sections 77 and 78 of the Copyright, Designs and Patents Act 1988. All the characters in the book are fictitious, and any resemblance to actual persons, living or dead, is purely coincidental. © Kerry Plowright 2012 2 | The Seeds of Armageddon © Kerry Plowright 2012 3 | The Seeds of Armageddon FORWARD For those interested in aviation, featured in this book is RAAF F‐111 A8‐272 ‐ aka the Bone Yard Wrangler and A8‐277 nick named Double Trouble. They b oth served with the 380th Bomb Wing SAC Plattsburg AFB before being sent to an Arizona boneyard. In 1994 they were rescued by the RAAF and soldiered on until 2010 mostly out of Amberely in Queensland. Once again they were retired and supposedly cut up for scrap or [put on static display (So everyone thought). What actually happened is a different story. Several airfra mes did become gate post decorations and many were scrapped, but not all of them. Wrangler, Double Trouble and a handful of other airframes went somewhere else – along with a bunch of others fr om the Arizonas desert. F‐111G, A8‐272 the ‘Boneyard Wrangler’, as far the public are aware, is on display at the RAAF Museum at Point Cook near Melbourne. -

Ministry of Defence Acronyms and Abbreviations
Acronym Long Title 1ACC No. 1 Air Control Centre 1SL First Sea Lord 200D Second OOD 200W Second 00W 2C Second Customer 2C (CL) Second Customer (Core Leadership) 2C (PM) Second Customer (Pivotal Management) 2CMG Customer 2 Management Group 2IC Second in Command 2Lt Second Lieutenant 2nd PUS Second Permanent Under Secretary of State 2SL Second Sea Lord 2SL/CNH Second Sea Lord Commander in Chief Naval Home Command 3GL Third Generation Language 3IC Third in Command 3PL Third Party Logistics 3PN Third Party Nationals 4C Co‐operation Co‐ordination Communication Control 4GL Fourth Generation Language A&A Alteration & Addition A&A Approval and Authorisation A&AEW Avionics And Air Electronic Warfare A&E Assurance and Evaluations A&ER Ammunition and Explosives Regulations A&F Assessment and Feedback A&RP Activity & Resource Planning A&SD Arms and Service Director A/AS Advanced/Advanced Supplementary A/D conv Analogue/ Digital Conversion A/G Air‐to‐Ground A/G/A Air Ground Air A/R As Required A/S Anti‐Submarine A/S or AS Anti Submarine A/WST Avionic/Weapons, Systems Trainer A3*G Acquisition 3‐Star Group A3I Accelerated Architecture Acquisition Initiative A3P Advanced Avionics Architectures and Packaging AA Acceptance Authority AA Active Adjunct AA Administering Authority AA Administrative Assistant AA Air Adviser AA Air Attache AA Air‐to‐Air AA Alternative Assumption AA Anti‐Aircraft AA Application Administrator AA Area Administrator AA Australian Army AAA Anti‐Aircraft Artillery AAA Automatic Anti‐Aircraft AAAD Airborne Anti‐Armour Defence Acronym -

Fantasy Topgun Adven
Fantasy TopGun Adventure Emile Niu Jan. 2002 As a boy, I first read about the F-14 Tomcat fighters from Reader's Digest. At times it seem so remote, I could only dream of being a fighter pilot. During mid-1990s, I participated in certain California flying clubs and learned about the news of civilian flying military jets. The news described a program organized by a company MiG, Etc., which put civilian in training and behind the stick of active Migs and Sukhoi fighters. The venture started in 1992 when an investment banker was striking a deal in Moscow found his way to the cockpit of a MiG fighter as a courtesy ride offered by local authority. He then commercialized the activity and marketed the program in the States. I found the fax number of this Florida Company from a Smithsonian magazine and decided to send inquiry to check out the details. It turned out the company was acquired by another party and was renamed "Incredible Adventures". I received fax leaflets on the details of the flights and six months later; I signed up for the program. It was October 1996, the afternoon weather a bit chili when I finally arrived in Sheremetyero, Moscow. It was a long flight from Hong Kong through transit in London. From the airport, the agent transferred me to Hotel Metropol (same hotel as the movie Dr. Zhivago) where I met James Weber, another TopGun wannabes. The next morning, James and I were transported to Zhukovsky Air Base, the formerly classified military area established during the Soviet era on the outskirts of Moscow as the research and development center of the aviation industry. -

NEWSLETTER Volume 63 Issue 07 War-Birds Over Fredericksburg, VA
DCRC Club Meeting Montgomery County DCRC Council building 100 Maryland Ave DCRC Club Meeting Rockville, MD PROGRAM: July 21, 2017 Andy Kane 7:30 PM Raffle: County Council Building Doug Hinken Rockville, MD NEWSLETTER Volume 63 Issue 07 War-Birds over Fredericksburg, VA. A special heritage flight with A-10 Thunderbolt (Warthog) and P-47 Thunderbolt (The Jug) Kwang Ko on the left with his Sky master A-10 and Andy Kane on the right with his CARF Model P-47 District of Columbia Radio Control Club Montgomery County Maryland AMA Chartered Club 329 Established 1951 DISTRICT OF COLUMBIA RADIO CONTROL CLUB Volume 63 Issue 07 Page 2 PRESIDENT: Jim McDaniel FMS 182 FROM BOX TO RUNWAY time anyhow. BY FRANK MARTIN V.P. Walt Gallaugher The stalling characteristic of this model is County Liaison: Jim McDaniel unique though, it will drop the right, starboard, BOARD OF DIRECTORS wing. The first time this happened to me it Andy Finizio The FMS Sky Trainer V2 is an inter- was a “WTF” type of moment, but as men- Jim Fisher mediate RC model that EVERYONE should tioned earlier this model is forgiving; it has Walt Gallaugher have! I have had four and the one on the pho- “stupid power” and more often than not you David Garrison tographs is my fourth and I am just as thrilled can recuperate, just make sure that there is Andy Kane with it as the very first one I had. It is forgiv- enough air between the bottom of the air plane Ed Leibolt ing and it is built strong enough to withstand and the ground. -

Proceedings Atti 35Th INTERNATIONAL CONGRESS OF
Proceedings Atti 35th INTERNATIONAL CONGRESS OF THE WORLD ASSOCIATION FOR THE HISTORY OF VETERINARY MEDICINE IV CONGRESSO ITALIANO DI STORIA DELLA MEDICINA VETERINARIA Nella stessa collana sono stati pubblicati i seguenti volumi: l - 1979 Infezioni respiratorie del bovino 2 - 1980 L’oggi e il domani della sulfamidoterapia veterinaria 3 - 1980 Ormoni della riproduzione e Medicina Veterinaria 4 - 1980 Gli antibiotici nella pratica veterinaria 5 - 1981 La leucosi bovina enzootica 6 - 1981 La «Scuola per la Ricerca Scientifica» di Brescia 7 - 1982 Gli indicatori di Sanità Veterinaria nel Servizio Sanitario Nazionale 8 - 1982 Le elmintiasi nell’allevamento intensivo del bovino 9 - 1983 Zoonosi ed animali da compagnia 10 - 1983 Le infezioni da Escherichia coli degli animali 11 - 1983 Immunogenetica animale e immunopatologia veterinaria 12 - 1984 5° Congresso Nazionale Associazione Scientifica di Produzione Animale 13 - 1984 Il controllo delle affezioni respiratorie del cavallo 14 - 1984 1° Simposio Internazionale di Medicina veterinaria sul cavallo da competizione 15 - 1985 La malattia di Aujeszky. Attualità e prospettive di profilassi nell’allevamento suino 16 - 1986 Immunologia comparata della malattia neoplastica 17 - 1986 6° Congresso Nazionale Associazione Scientifica di Produzione Animale 18 - 1987 Embryo transfer oggi: problemi biologici e tecnici aperti e prospettive 19 - 1987 Coniglicoltura: tecniche di gestione, ecopatologia e marketing 20 - 1988 Trentennale della Fondazione Iniziative Zooprofilattiche e Zootecniche di Brescia, 1956- -

Modern Combat Aircraft (1945 – 2010)
I MODERN COMBAT AIRCRAFT (1945 – 2010) Modern Combat Aircraft (1945-2010) is a brief overview of the most famous military aircraft developed by the end of World War II until now. Fixed-wing airplanes and helicopters are presented by the role fulfilled, by the nation of origin (manufacturer), and year of first flight. For each aircraft is available a photo, a brief introduction, and information about its development, design and operational life. The work is made using English Wikipedia, but also other Web sites. FIGHTER-MULTIROLE UNITED STATES UNITED STATES No. Aircraft 1° fly Pg. No. Aircraft 1° fly Pg. Lockheed General Dynamics 001 1944 3 011 1964 27 P-80 Shooting Star F-111 Aardvark Republic Grumman 002 1946 5 012 1970 29 F-84 Thunderjet F-14 Tomcat North American Northrop 003 1947 7 013 1972 33 F-86 Sabre F-5E/F Tiger II North American McDonnell Douglas 004 1953 9 014 1972 35 F-100 Super Sabre F-15 Eagle Convair General Dynamics 005 1953 11 015 1974 39 F-102 Delta Dagger F-16 Fighting Falcon Lockheed McDonnell Douglas 006 1954 13 016 1978 43 F-104 Starfighter F/A-18 Hornet Republic Boeing 007 1955 17 017 1995 45 F-105 Thunderchief F/A-18E/F Super Hornet Vought Lockheed Martin 008 1955 19 018 1997 47 F-8 Crusader F-22 Raptor Convair Lockheed Martin 009 1956 21 019 2006 51 F-106 Delta Dart F-35 Lightning II McDonnell Douglas 010 1958 23 F-4 Phantom II SOVIET UNION SOVIET UNION No. -

Freefalcon5.0/Redviper Companionl
for J.L.W. What you have is STILL a W.I.P. FF5.0 is by no means a “Finished Product”. Again, we would stress this point. Having taken into account the feedback from the Community, this release simply builds upon the previous release. The Team continues to rely upon the FreeFalcon Community, to ensure the development of FreeFalcon toward its full potential. Development of the FreeFalcon Graphics Engine continues, as does progress in all areas of the Simulation. Obviously, this release is NOT the “end” of development; just a further step in an unending process of tweaking and improvement. Once again, the Team very much looks forward to your input as we continue to to develop Falcon™ The FreeFalcon Team thanks you – the Community – for all of the valuable feedback which has allowed development to continue. We very much look forward to your continuing comments and observations. s. ii READ THIS This is an “Automated” Document. Most Pages are ACTIVE…! By clicking on the title icons, you will be taken directly to the selected page. You can return to the Contents of this document by clicking on various “Snakes” “Pictures” and “Icons” located at the bottom of many pages. For ease of Navigation, you should also use the BOOKMARKS Tab (to the left) About this Companion …………………………….. Yet another F.A.Q. …………………………….. Snail’s Slow Guide To Multiplayer M ULTIPLAYER Khronik’s Chronic MP For Dummies FreeFalcon Multi Miscellany RifleFighter’s TeamSpeak 3D Pits ………………………………………... It’s The ‘Pits….. BREVITY Codes …… Wild Red Yonder Weather FF5.0 Enhancements Carrier Ops Keystrokes Config Editor Cover shows screenshot from FreeFalcon/RedVIPER Israeli Theatre of Operations II Projects The Phantom The Tornado The LEGACY The Learning Centre AVIONICS Star Navigation Landing the F-16 Dual Terrain SKINNING Skins - 512 Vs 1024 ……… DewDog ’s War College …………………………..…. -

Computational Challenges in High Angle of Attack Flow Prediction
Computational challenges in high angle of attack flow prediction a b b C Russell M. Cummings , James R. Forsythe , Scott A. Morton , Kyle D. Squires a Aerospace Engineering Department, California Polytechnic State University, San Luis Obispo, CA 93407, USA b Department of Aeronautics, United States Air Force Academy, USAF Academy, CO 80840, USA C Department of Mechanical and Aerospace Engineering, Arizona State University, Tempe, AZ 85287, USA Abstract Aircraft aerodynamics have been predicted using computational fluid dynamics for a number of years. While viscous flow computations for cruise conditions have become commonplace, the non-linear effects that take place at high angles of attack are much more difficult to predict. A variety of difficulties arise when performing these computations, including challenges in properly modeling turbulence and transition for vortical and massively separated flows, the need to use appropriate numerical algorithms if flow asymmetry is possible, and the difficulties in creating grids that allow for accurate simulation of the flowfield. These issues are addressed and recommendations are made for further improvements in high angle of attack flow prediction. Current predictive capabilities for high angle of attack flows are reviewed, and solutions based on hybrid turbulence models are presented. Contents I. Introduction 370 2. Computational challenges 372 2.1. Governing equation complexity 372 2.2. Turbulence modeling . 374 2.3. Transition modeling . 376 2.4. Flowfield asymmetry and algorithm symmetry. 377 2.5. Grid generation and density ..... 379 2.6. Numerical dissipation . 380 3. Computational results and future directions 381 4. Conclusions. 382 References. 383 1. Introduction * medium angle of attack 15pap30 (separated, symmetric rolled-up vortices, steady flow, non-linear Aircraft fly at a variety of incidence angles, depending lift variation); on their purpose and flight requirements. -

Learning Pugachev's Cobra Maneuver for Tail-Sitter Uavs Using
IEEE ROBOTICS AND AUTOMATION LETTERS. PREPRINT VERSION. ACCEPTED FEBRUARY, 2020 1 Learning Pugachev’s Cobra Maneuver for Tail-sitter UAVs Using Acceleration Model Wei Xu1, Fu Zhang1 Abstract—The Pugachev’s cobra maneuver is a dramatic and demanding maneuver requiring the aircraft to fly at extremely high Angle of Attacks (AOA) where stalling occurs. This paper considers this maneuver on tail-sitter UAVs. We present a simple yet very effective feedback-iterative learning position control structure to regulate the altitude error and lateral displacement during the maneuver. Both the feedback controller and the Fig. 1. The Pugachev’s Cobra Maneuver 2. iterative learning controller are based on the aircraft accel- eration model, which is directly measurable by the onboard Although there are a few prior work on the control of fixed- accelerometer. Moreover, the acceleration model leads to an wing UAVs in post-stall maneuvers, such as [7]–[9], none of extremely simple dynamic model that does not require any model identification in designing the position controller, greatly them directly cope with the Pugachev manuever. Another way simplifying the implementation of the iterative learning control. is to view this maneuver as a backward transition (from level Real-world outdoor flight experiments on the “Hong Hu” UAV, flight to vertical flight) immediately followed by a forward an aerobatic yet efficient quadrotor tail-sitter UAV of small-size, transition (from vertical flight to level flight). For the control are provided to show the effectiveness of the proposed controller. of the transition flight, a large number of researches could be found. In [10], three transition controllers were investigated I. -

2000-01-2100 Analysis of Aerobatic Flight Safety Using Autonomous Modeling and Simulation
SAE TECHNICAL PAPER SERIES 2000-01-2100 Analysis of Aerobatic Flight Safety Using Autonomous Modeling and Simulation Ivan Y. Burdun Georgia Institute of Technology Oleg M. Parfentyev Siberian Aeronautical Research Institute Reprinted From: Proceedings of the 2000 Advances in Aviation Safety Conference (P-355) Advances in Aviation Safety Conference and Exposition Daytona Beach, Florida April 11-13, 2000 400 Commonwealth Drive, Warrendale, PA 15096-0001 U.S.A. Tel: (724) 776-4841 Fax: (724) 776-5760 The appearance of this ISSN code at the bottom of this page indicates SAE’s consent that copies of the paper may be made for personal or internal use of specific clients. This consent is given on the condition, however, that the copier pay a $7.00 per article copy fee through the Copyright Clearance Center, Inc. Operations Center, 222 Rosewood Drive, Danvers, MA 01923 for copying beyond that permitted by Sec- tions 107 or 108 of the U.S. Copyright Law. This consent does not extend to other kinds of copying such as copying for general distribution, for advertising or promotional purposes, for creating new collective works, or for resale. SAE routinely stocks printed papers for a period of three years following date of publication. Direct your orders to SAE Customer Sales and Satisfaction Department. Quantity reprint rates can be obtained from the Customer Sales and Satisfaction Department. To request permission to reprint a technical paper or permission to use copyrighted SAE publications in other works, contact the SAE Publications Group. All SAE papers, standards, and selected books are abstracted and indexed in the Global Mobility Database No part of this publication may be reproduced in any form, in an electronic retrieval system or otherwise, without the prior written permission of the publisher. -
Predicting the Aerobatic Capabilities of Marginally Aerobatic Airplanes Bernardo Malfitano – Understandingairplanes.Com EAA Airventure Oshkosh 2018
Predicting the Aerobatic Capabilities of Airplanes – EAA Oshkosh 2018 © Bernardo Malfitano Predicting the Aerobatic Capabilities of Marginally Aerobatic Airplanes Bernardo Malfitano – UnderstandingAirplanes.com EAA AirVenture Oshkosh 2018 Understanding Airplanes . com 1 Predicting the Aerobatic Capabilities of Airplanes – EAA Oshkosh 2018 © Bernardo Malfitano Bernardo Malfitano Academic • B.S. Mechanical Engr., Stanford University • M.S. Mechanical Engr., Columbia University Elective courses, lab work, and research topics included airplane design, aerodynamics, control systems, and propulsion Hobbies. • Articles and photos on various aviation magazines, websites, & books, since 2003 • Pilot, RV‐6 owner. 1st solo: 2009 1st aerobatic solo: 2012 1st flight to Oshkosh: 2014 Professional. • Boeing Commercial Aviation Services (Fleet support, structural analysis of repairs, maintenance planning); Long Beach: 2007‐2008 • BCA Structural Damage Technology (Fatigue & Fracture Mechanics allowables testing and analysis methods development); Everett: 2009‐2018 • BCA Airplane Configuration & Integration (Product Development); Harbour Pointe: 2018‐Present Understanding Airplanes . com 2 Predicting the Aerobatic Capabilities of Airplanes – EAA Oshkosh 2018 © Bernardo Malfitano Notes • All images are © their respective owners. • All opinions expressed here are my own. I do not represent my employer, the FAA, or the EAA. • A video of me delivering this talk can be found at https://www.youtube.com/channel/UCh7C3C5hKAVZR0SCPhECrMQ • A paper that describes these physics principles in more detail is at https://www.understandingairplanes.com/Aerobatics-Analysis.pdf Understanding Airplanes . com 3 Predicting the Aerobatic Capabilities of Airplanes – EAA Oshkosh 2018 © Bernardo Malfitano Disclaimers • I am not an FAA‐certified instructor, or a test pilot! • This is purposefully kept at a high‐school level: For students, non‐engineers, and EAA members ;] • This talk is about what is physically possible, not what is safe, legal, or advisable.